
谈谈OpenNI 2的第一个程序
 对于新的东西总是很有激情,昨天安装了最新版的OpenNI 2 SDK,发现很多东西跟之前的不太一样了,今天根据OpenNI 2自带的程序捯饬捯饬,初看怎么使用,废话不多说,直接上图说话。
1. 创建新的C++控制台项目MyMyOpenNI2SimpleView,具体省去;
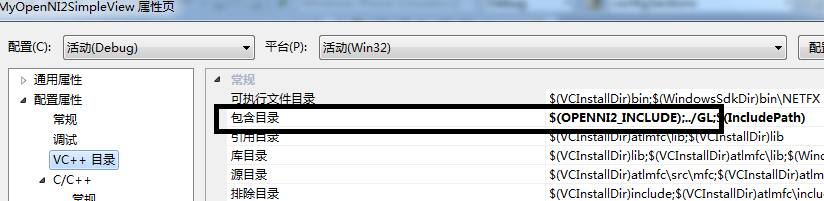
2. 首先跟使用传统的OpenCV等类似,都需要进行配置,右键点击项目,选择属性窗口,选择VC++目录,在右边包含目录中输入需要载录库的include文件夹,其中包括OPenNI2的include文件夹和需要用到的GL文件夹;
对于新的东西总是很有激情,昨天安装了最新版的OpenNI 2 SDK,发现很多东西跟之前的不太一样了,今天根据OpenNI 2自带的程序捯饬捯饬,初看怎么使用,废话不多说,直接上图说话。
1. 创建新的C++控制台项目MyMyOpenNI2SimpleView,具体省去;
2. 首先跟使用传统的OpenCV等类似,都需要进行配置,右键点击项目,选择属性窗口,选择VC++目录,在右边包含目录中输入需要载录库的include文件夹,其中包括OPenNI2的include文件夹和需要用到的GL文件夹;
对于新的东西总是很有激情,昨天安装了最新版的OpenNI 2 SDK,发现很多东西跟之前的不太一样了,今天根据OpenNI 2自带的程序捯饬捯饬,初看怎么使用,废话不多说,直接上图说话。
1. 创建新的C++控制台项目MyMyOpenNI2SimpleView,具体省去;
2. 首先跟使用传统的OpenCV等类似,都需要进行配置,右键点击项目,选择属性窗口,选择VC++目录,在右边包含目录中输入需要载录库的include文件夹,其中包括OPenNI2的include文件夹和需要用到的GL文件夹;
3. 接着同样在属性页的“l链接器”中的“常规”选项的“附件库目录”中输入OpenNI2的lib文件夹,和GL文件夹;

4. 最后在链接器下的“输入”选项的的附加依赖项输入所需要的OpenNI2.lib和Glut32.lib。

最后需要将“C:\Program Files\OpenNI2\Redist”文件夹加入到工程中,我的做法是在“调试”的工作目录指到该文件夹下

5. 基本配置完之后,开始编写代码了,主要有以下几个步骤:
5.1 include OpenNI.h,基本要用到的OpenNI C++ API都在openni这个namespace下。
5.2 使用openni::OpenNI::initialize()函数初始化OpenNI环境。
5.3 新建openni::Device对象device,然后利用函数device.open()打开设备,其中函数参数为制定装置的URI。
5.4 新建openni::VideoStream对象,利用它的create()函数,指定这个VideoStrea要使用的装置的哪个感应器(红外线、彩色影像和深度影像)。创建完之后,就可以利用start()和stop()函数来控制数据流的读取和停止操作。
5.5 根据获取的数据流进行一些你自己的处理和操作。
5.6 当不再使用感应器资源数据流时,首先需要使用函数destroy()关闭VideoStream流。
5.7 然后利用设备对象device的close()函数关闭装置,最后利用openni::OpenNI::shutdown()来关闭整个OpenNI环境。
6. 上main()函数代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 | #include "stdafx.h"#include <iostream>#include <OpenNI.h>#include "Viewer.h"int main(int argc, char** argv){ openni::Status rc = openni::STATUS_OK; openni::Device device; openni::VideoStream depth, color; const char* deviceURI = openni::ANY_DEVICE; // 1. 初始化OpenNI. rc = openni::OpenNI::initialize(); // 2. 打开Kinect设备,这里deviceURI设置为openni::ANY_DEVICE /* * (1) 如果有多个装置,xiangyao指定要用哪个装置的话,需要先通过 * static void openni::OpenNI::enumerateDevices(Array<DeviceInfo>* deviceInfoList) * 这个函数获取可使用的装置列表,在通过指定的URI的方式,来指定要开启的装置; * (2) 如果没有要特别指定的话或者只有一个装置的话,则是用openni::ANY_DEVICE作为URI,让系统 * 决定要使用的装置. */ rc = device.open(deviceURI); // 3. openni::SENSOR_DEPTH表示创建深度数据流; /************************************************************************/ /* 这里的create()函数的第二个参数是一个枚举类型enum openni::SensorType,主要有 * 三个Enumerator:SENSOR_IR, SENSOR_COLOR和SENSOR_DEPTH.通过字面也知道他们是 * 分别要获取哪个类型的数据流信息。 */ /************************************************************************/ rc = depth.create(device, openni::SENSOR_DEPTH); if (rc == openni::STATUS_OK) { // 4. 透过start和stop函数来控制数据流的读取。 rc = depth.start(); if (rc != openni::STATUS_OK) { printf("SimpleViewer: Couldn't start depth stream:\n%s\n", openni::OpenNI::getExtendedError()); depth.destroy(); } } else { printf("SimpleViewer: Couldn't find depth stream:\n%s\n", openni::OpenNI::getExtendedError()); } // 同样的利用openni::SENSOR_COLOR读取颜色图像数据流。 rc = color.create(device, openni::SENSOR_COLOR); if (rc == openni::STATUS_OK) { rc = color.start(); if (rc != openni::STATUS_OK) { printf("SimpleViewer: Couldn't start color stream:\n%s\n", openni::OpenNI::getExtendedError()); color.destroy(); } } else { printf("SimpleViewer: Couldn't find color stream:\n%s\n", openni::OpenNI::getExtendedError()); } if (!depth.isValid() || !color.isValid()) { printf("SimpleViewer: No valid streams. Exiting\n"); openni::OpenNI::shutdown(); return 2; } // 5. 根据获取到的深度数据流和彩色图像数据流,创建SampleViewer对象,显示深度图像。 SampleViewer sampleViewer("Simple Viewer", device, depth, color); rc = sampleViewer.init(argc, argv); if (rc != openni::STATUS_OK) { openni::OpenNI::shutdown(); return 3; } sampleViewer.run();} |
7. 利用到的SampleView类文件在OpenNI SDK中有提供,最后上图(2~~~):

留住安装和配置过程以防下次自己忘了,或者给大家做个小参考。写的很水,请大家多多指导哦~~~


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步