
[双目视差] 单双目MATLAB 相机标定(二)双目摄像机标定
单双目MATLAB 相机标定(二)双目摄像机标定
一、环境准备
MATLAB R2014a+windows7 64位
单目标定的15对左右摄像头获取的图像,还有两个独立标定的结果如Calib_Results_left.mat、Calib_Results_right.mat
二、标定过程
(1)在窗口处输入“stereo_gui",出现如图窗口:
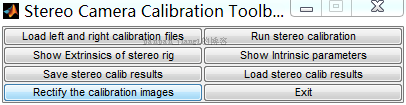
(2)点击第一个按钮 Load left and right calibration files .窗口提示输入左右标定文件名,分别输入对应文件名 Calib_Results_left.mat Calib_Results_right.mat

(3)运行全局双目优化算法通过点击按钮Run stereo calibration 有以下所示结果:

可以发现内外参数都被重新计算,所有未确定的参数也确定保证误差最小的基础上。你会发现不确定的内参数都变小了,这是因为最优化算法的作用。默认情况下,优化算法会重新计算左右相机的内部参数,但是如果你不想让其优化,则在窗口运行recompute_instrinsic_left和或者recompute_instrinsic_right
(4)双目相机的空间位置和标定平面可以可视化,通过点击按键 Show Extrinsics of the rig.

(5)点击 Savestereo calib results ,存储标定数据结果

(6)校正图像 点击 Rectify the calibrationimages ,所有15对图片校正后图像存储在文件下

因为提供了原始的图像,这两个初始的独立的校准可以得到Calib_Results_left.mat和Calib_Results_right.mat。
通过角点提取的过程,需要牢记的是,对于每对图像,必须选择相同的一组左、右图像的点,即相同的网格点和相同的原点(为了保证相同的模式参考系)。因此,确保相同的起源点(第一次点击)一直被选中是至关重要的。一个简单的方法是总选择网格的左上角为原点(这样做是为了生成两个提供的校准文件)。在您自己的立体标定中,可以使用不同的策略,如标志的起源点在网格模式本身。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号