室内定位研究综述笔记
室内定位研究综述笔记
1、室内定位概念
在室内环境无法使用卫星定位时,使用室内定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透建筑物的问题。最终定位物体当前所处的位置。
室内定位是指在室内环境中实现位置定位,主要采用无线通讯、基站定位、惯导定位、动作捕捉等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控。
2、室内定位研究意义
虽然卫星导航系统具有定位精度高、实时性等优点,但是在面对峡谷、高大建筑群附近、地下室及室内等复杂环境时,由于受到多径干扰、环境噪声及非直射环境等因素的影响,GPS 信号会出现高度衰减问题,其定位精度会迅速降低难以满足精确定位的需要。 随着城市化进程的快速发展,大型建筑日益增多。有数据表明,人类有 80%-90%的时间都是在室内度过的(包括矿井、隧道、地下室等),婴幼儿和老年人在室内的时间相对会更长,所以室内定位技术的应用前景非常广阔。
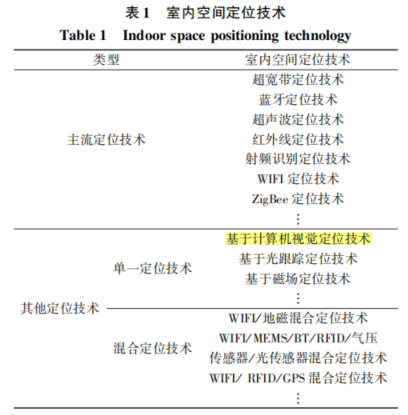
3、室内定位的方法
室内定位的技术方法比较多:
高德地图已经有API,是使用蓝牙和WIFI的方法,已经落地。
https://lbs.amap.com/product/indoorlocation

百度地图也已经有API,应该是基于WIFI的方法
https://lbsyun.baidu.com/indoor/indoormap/introduct

中芯微 5G+蓝牙AOA/UWB/有源RFID/Beacon+GPS/北斗 全系列室内外定位融合产品方案供应商
http://www.ccrfid.com/index.html
4、室内定位的痛点和挑战
5、室内定位的展望
6、室内定位感兴趣的方向
基于计算机视觉室内定位:
优点:精度高
缺点:容易受遮挡影响
其它基于信号的室内定位:
优点:不受光线、室内遮挡影响
缺点:精度低,易受到多径效应干扰
那为什么不融合呢?————保证精度的同时,受环境影响小
将多种室内定位技术信息源进行多模态融合,实现室内定位
(1)使用机器学习对多源信息进行融合定位
(2)主流方法+计算机视觉定位方法。
(3)指纹匹配定位方法——使用机器学习算法估计
基于信号(例如蓝牙、WIFI)的室内定位主要优点是不受光线、室内遮挡影响,但受到多径效应干扰时精度低;基于计算机视觉的室内定位主要优点是精度高,但容易受遮挡影响。若能做多模态融合定位,进行优势互补,能让室内定位精度更高。
在近几年的研究动态中,基于计算机视觉的室内定位具有广泛的研究。德国NavVis公司专注于基于计算机视觉的室内定位技术,精确到米的视觉定位产品已经落地[1]。谷歌公司发布了搭载谷歌 Tango AR 平台,利用视觉与深度等多模态信息,实现理论精度可达厘米级别的视觉定位服务。Karakaya等人提出了一种基于图像处理的室内定位系统方案[2]。Qu X等人提出了一种改进的基于SIFT 和SURF 图像检测算法的室内定位方案,通过用户图像与该精准 3D 场景的匹配从而完成定位[3]。Das M P等人提出了一种基于点云的匹配方法,构建包含深度的点云信息与已有的 3D 模型进行匹配从而完成对于自身的定位[4]。Han Xu等人提出的Argus 定位系统,在定位阶段融合了Wi-Fi与视觉,利用 SfM 获取的相对距离约束减少 Wi-Fi 的定位误差[5]。iMoon 定位系统直接构建整个场景的 3D点云,为了减少点云匹配的时间消耗,Dong, Jiang & Xiao等人提出的iMoon将3D点云分为不同的区域并利用 Wi-Fi进行粗定位缩小点云匹配的范围[6]。Lu G等人利用光流估计的方式去除图像中的行人后再进行 3D点云构建,减少行人对构建的 3D 点云模型以及 2D 图像到 3D 模型匹配定位的影响[7]。Kendall A等人提出了基于神经网络的点云匹配算法,实现了端到端图像定位系统PoseNet[8]。Ronald Clark等提出了 VidLoc定位系统,利用LSTM处理信息更丰富的用户查询视频,取得更精确的结果[9]。Vedadi F等人提出一种能够自动建立图像位置指纹数据库的方法,将人的运动模型融入图像采集的过程中,降低了视觉室内定位系统在图像训练阶段的复杂性[10]。Feng G等人使用 RGB-D 传感器构建具有深度信息的三维视觉地图,在视觉地图的基础上利用对极几何约束算法实现基于图像的定位方法,并通过室内仿真实验证明定位的平均误差限制在0.2-0.9米内[11]。Li M等人提出一种基于手机单图像的室内视觉精密定位方法,室内定位精度约为 10cm[12]。
综上所述,基于计算机视觉的室内定位研究是目前的研究热点,具有深远的研究意义。但视觉的场景环境毕竟是复杂的、多变的,特别是面临遮挡问题时是很大的挑战,会极大影响室内定位。针对目前的痛点,基于计算机视觉+主流室内定位技术(例如超带宽定位、蓝牙和WIFI定位等)进行室内定位多模态融合,能解决室内定位复杂多变的环境影响,提高室内定位精度。
参考文献:
[1]德国NavVis公司官网https://www.youuav.com/shop/2562/about/
[2]Karakaya S,Ocak H .Low Cost Easy-to-Install Indoor Positioning System[J]. Journal of Intelligent and Robotic Systems, 2020,100(1):131-144.
[3]Qu X, Soheilian B , Habets E , et al. Evaluation of SIFT and SURF for vision based localization[J]. 2016.
[4]Das M P, Zhen D, Scherer S.Joint Point Cloud and Image Based Localization For Efficient Inspection in Mixed Reality[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019.
[5]Han Xu, Zheng Yang, Zimu Zhou, Longfei Shangguan, Ke Yi, and Yunhao Liu. 2015. Enhancing wifi-based localization with visual clues. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing (UbiComp '15). Association for Computing Machinery, New York, NY, USA, 963–974. DOI:https://doi.org/10.1145/2750858.2807516
[6]Dong, Jiang & Xiao, Yu & Noreikis, Marius & Ou, Zhonghong & Ylä-Jääski, Antti. (2015). iMoon: Using Smartphones for Image-based Indoor Navigation. 10.1145/2809695.2809722.
[7]Lu G, Yan Y, Kolagunda A , et al. A Fast 3D Indoor-Localization Approach Based on Video Queries[J]. Springer International Publishing, 2016.
[8]Kendall A , Grimes M , Cipolla R .PoseNet: A convolutional network for real-time 6-dof camera relocalization[J]. IEEE, 2015.
[9]Clark R,Wang S,Markham A , et al. VidLoc: A Deep Spatio-Temporal Model for 6-DoF Video-Clip Relocalization[J]. IEEE, 2017.
[10]Vedadi F , Valaee S . Automatic Visual Fingerprinting for Indoor Image-Based Localization Applications[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017:1-13.
[11]Feng G , Ma L , Tan X . Visual Map Construction Using RGB-D Sensors for Image-Based Localization in Indoor Environments[J]. Journal of Sensors, 2017, 2017:1-18.
[12]Li M ,Chen R,Liao X ,et al. A Precise Indoor Visual Positioning Approach Using a Built Image Feature Database and Single User Image from Smartphone Cameras[J]. Remote Sensing, 2020, 12(5):869.
本文来自博客园,作者:JaxonYe,转载请注明原文链接:https://www.cnblogs.com/yechangxin/articles/16087721.html
侵权必究
 浙公网安备 33010602011771号
浙公网安备 33010602011771号