
详解HRNet姿态估计算法
文章目录
🧇前言
本文结合多位大佬文章和自己理解所绘制,希望对大家有所帮助
论文地址:
https://arxiv.org/pdf/1908.07919.pdf
代码地址:
https://github.com/HRNet
🧇HRNet理论
计算机视觉领域有很多任务是位置敏感的,比如目标检测、语义分割、实例分割等等。为了这些任务位置信息更加精准,很容易想到的做法就是维持高分辨率的feature map,事实上HRNet之前几乎所有的网络都是这么做的,通过下采样得到强语义信息,然后再上采样恢复高分辨率恢复位置信息(如下图所示),然而这种做法,会导致大量的有效信息在不断的上下采样过程中丢失。而HRNet通过并行多个分辨率的分支,加上不断进行不同分支之间的信息交互,同时达到强语义信息和精准位置信息的目的。

恢复高分辨率

HRNet保持高分辨率
思路在当时来讲,不同分支的信息交互属于很老套的思路(如FPN等),我觉得最大的创新点还是能够从头到尾保持高分辨率,而不同分支的信息交互是为了补充通道数减少带来的信息损耗,这种网络架构设计对于位置敏感的任务会有奇效。
🧇HRNet结构细节
🍞Backbone设计
上面这张图可以看到stem,我在最后整体代码设计模块forward给出代码,只有两行。
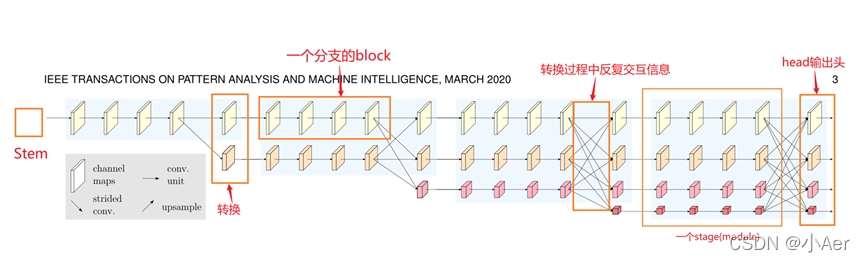
如上图所示,主要包括4个部分:
- Stem: 处理输入图片尺寸,转换为能够输入主网络的特征图;
- block: 指最小的特征提取单元(conv 单元) ,如图矩形框住的一个分支,由4个block组成;
- stage: 一共有四个stage,第一个stage有一个分支(分辨率流),第n个stage有n个分支;
- head: 决定HRNet的输出结构,对应三种输出;

蓝色部分表示stage基本结构,红色部分表示过渡结构
我将HRNet整个backbone部分进行了拆解,分成4个stage,每个stage分成蓝色框和红色框两部分。其中蓝色框部分是每个stage的基本结构,由多个branch组成,HRNet中stage1蓝色框使用的是BottleNeck,stage2&3&4蓝色框使用的是BasicBlock。其中红色框部分是每个stage的过渡结构,HRNet中stage1红色框是一个TransitionLayer,stage2&3红色框是一个FuseLayer和一个TransitionLayer的叠加,stage4红色框是一个FuseLayer。
解释一下为什么这么设计,FuseLayer是用来进行不同分支的信息交互的,TransitionLayer是用来生成一个下采样两倍分支的输入feature map的,stage1红色框显然没办法做FuseLayer,因为前一个stage只有一个分支,stage4红色框后面接neck和head了,显然也不再需要TransitionLayer了。
整个backbone的构建流程可以总结为:make_backbone -> make_stages -> make_branches
有关backbone构建相关的看源码,主要讲一下FuseLayer、TransitionLayer和Neck的设计
🍞BasicBlock设计
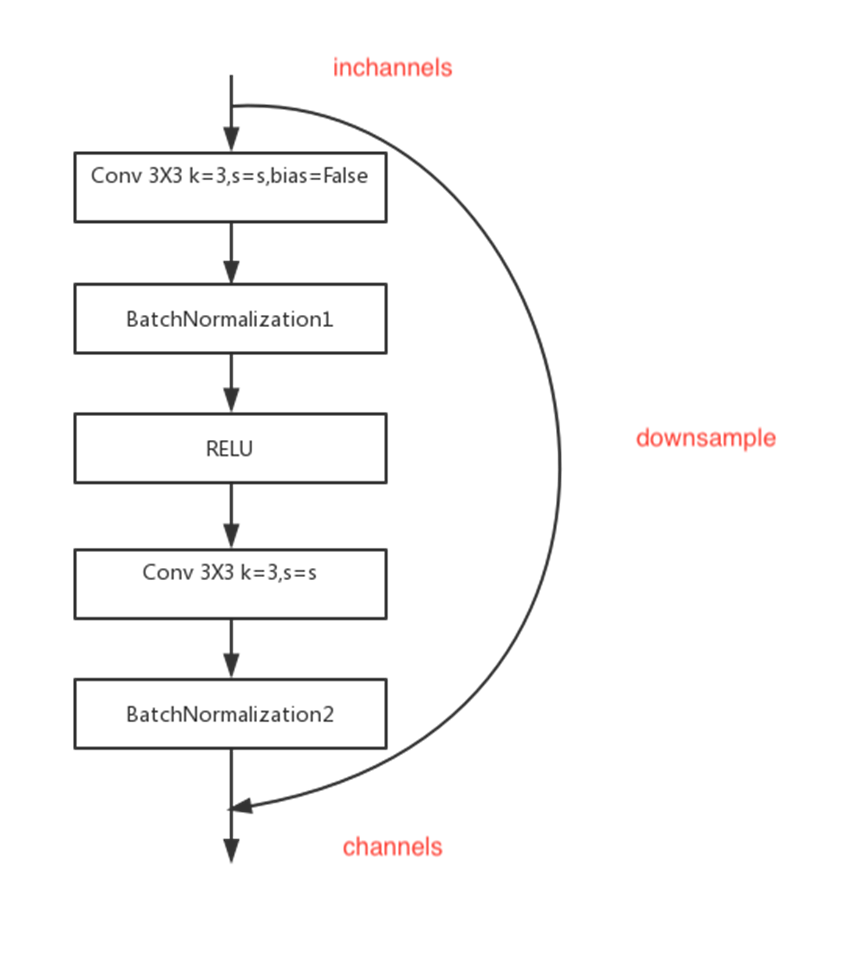
代码很清晰,不难理解
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
🍞Bottleneck设计
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1,
bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion,
momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
🍞FuseLayer设计
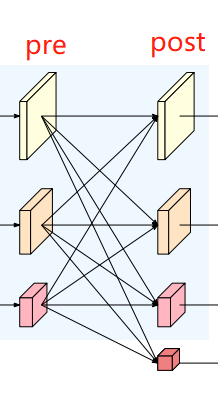
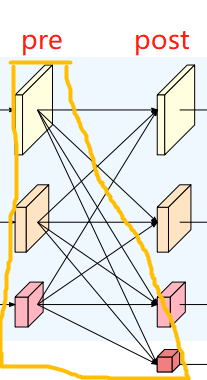
FuseLayer部分以绿色框为例,融合前为pre,融合后为post,静态构建一个二维矩阵,然后将pre和post对应连接的操作一一填入这个二维矩阵中。
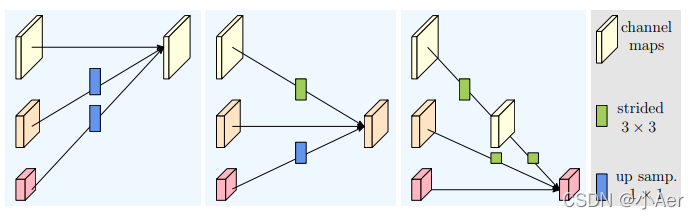
以上图为例,图1的pre1和post1的操作为空,pre2和post1的操作为2倍上采,pre3和post1的操作为4倍上采;图2的pre1和post2的操作为3x3卷积下采,pre2和post2的操作为空,pre3和post2的操作为2倍上采;图3的pre1和post3的操作为连续两个3x3卷积下采,pre2和post3的操作为3x3卷积下采,pre3和post的操作为空。
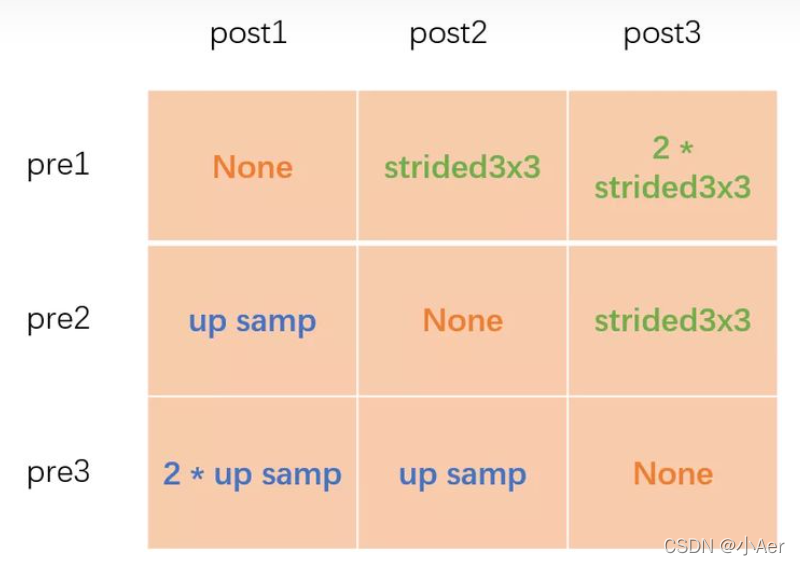
引用自https://zhuanlan.zhihu.com/p/335333233
前向计算时用一个二重循环将构建好的二维矩阵一一解开,将对应同一个post的pre转换后进行融合相加。比如post1 = f11(pre1) + f12(pre2) + f13(pre3)
FuseLayer的整体code如下
def _make_fuse_layers(self):
fuse_layers = []
for post_index, out_channel in enumerate(self.out_channels[:len(self.in_channels)]):
fuse_layer = []
for pre_index, in_channel in enumerate(self.in_channels):
if pre_index > post_index:
fuse_layer.append(nn.Sequential(
nn.Conv2d(in_channel, out_channel, 1, 1, 0, bias=False),
nn.BatchNorm2d(out_channel, momentum=0.1),
nn.Upsample(scale_factor=2**(pre_index-post_index), mode='nearest')))
elif pre_index < post_index:
conv3x3s = []
for cur_index in range(post_index - pre_index):
out_channels_conv3x3 = out_channel if cur_index == post_index - pre_index - 1 else in_channel
conv3x3 = nn.Sequential(
nn.Conv2d(in_channel, out_channels_conv3x3, 3, 2, 1, bias=False),
nn.BatchNorm2d(out_channels_conv3x3, momentum=0.1)
)
if cur_index < post_index - pre_index - 1:
conv3x3.add_module('relu_{}'.format(cur_index), nn.ReLU(False))
conv3x3s.append(conv3x3)
fuse_layer.append(nn.Sequential(*conv3x3s))
else:
fuse_layer.append(None)
fuse_layers.append(nn.ModuleList(fuse_layer))
return nn.ModuleList(fuse_layers)
def forward(self, x):
x_fuse = []
for post_index in range(len(self.fuse_layers)):
y = 0
for pre_index in range(len(self.fuse_layers)):
if post_index == pre_index:
y += x[pre_index]
else:
y += self.fuse_layers[post_index][pre_index](x[pre_index])
x_fuse.append(self.relu(y))
🍞TransitionLayer设计
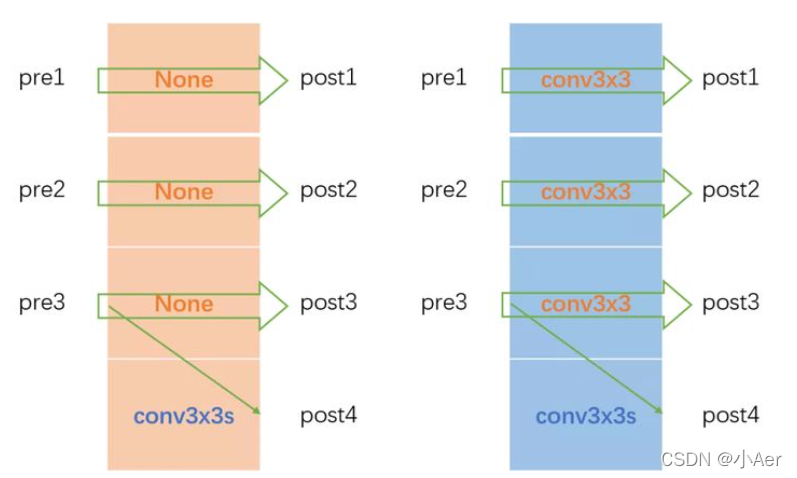
TransitionLayer以黄色框为例,静态构建一个一维矩阵,然后将pre和post对应连接的操作一一填入这个一维矩阵中。当pre1&post1、pre2&post2、pre3&post3的通道数对应相同时,一维矩阵填入None;通道数不相同时,对应位置填入一个转换卷积。post4比较特殊,这一部分代码和图例不太一致,图例是pre1&pre2&pre3都进行下采然后进行融合相加得到post4,而代码中post4通过pre3下采得到。
TransitionLayer整体code如下
def _make_transition_layers(self):
num_branches_pre = len(self.in_channels)
num_branches_post = len(self.out_channels)
transition_layers = []
for post_index in range(num_branches_post):
if post_index < len(self.in_channels):
if self.in_channels[post_index] != self.out_channels[post_index]:
transition_layers.append(nn.Sequential(
nn.Conv2d(self.in_channels[post_index], self.out_channels[post_index], 3, 1, 1, bias=False),
nn.BatchNorm2d(self.out_channels[post_index], momentum=0.1),
nn.ReLU(inplace=True)
))
else:
transition_layers.append(None)
else:
conv3x3s = []
for pre_index in range(post_index + 1 - num_branches_pre):
in_channels_conv3x3 = self.in_channels[-1]
out_channels_conv3x3 = self.out_channels[post_index] if pre_index == post_index - \
num_branches_pre else in_channels_conv3x3
conv3x3s.append(nn.Sequential(
nn.Conv2d(in_channels_conv3x3, out_channels_conv3x3, 3, 2, 1, bias=False),
nn.BatchNorm2d(out_channels_conv3x3, momentum=0.1),
nn.ReLU(inplace=True)
))
transition_layers.append(nn.Sequential(*conv3x3s))
return nn.ModuleList(transition_layers)
def forward(self, x):
x_trans = []
for branch_index, transition_layer in enumerate(self.transition_layers):
if branch_index < len(self.transition_layers) - 1:
if transition_layer:
x_trans.append(transition_layer(x[branch_index]))
else:
x_trans.append(x[branch_index])
else:
x_trans.append(transition_layer(x[-1]))
🍞Neck设计
我把HRNet所描述的make_head过程理解成make_neck(因为一般意义上将最后的fc层理解成head更为清晰,这个在很多开源code中都是这样子拆解的)。下面着重讲解一下HRNet的neck设计。
HRNet的backbone输出有四个分支,paper中给出了几种方式对输出分支进行操作。
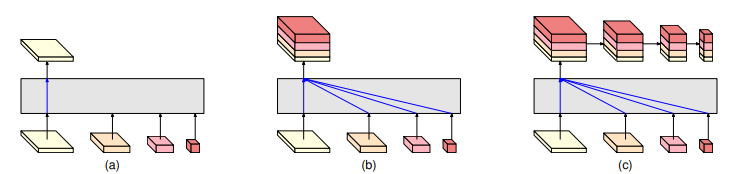
(a)图是HRNetV1的操作方式,只使用分辨率最高的feature map。
(b)图是HRNetV2的操作方式,将所有分辨率的feature map(小的特征图进行upsample)进行concate,主要用于语义分割和面部关键点检测。
©图是HRNetV2p的操作方式,在HRNetV2的基础上,使用了一个特征金字塔,主要用于目标检测。
而在图像分类任务上,HRNet有另一种特殊的neck设计
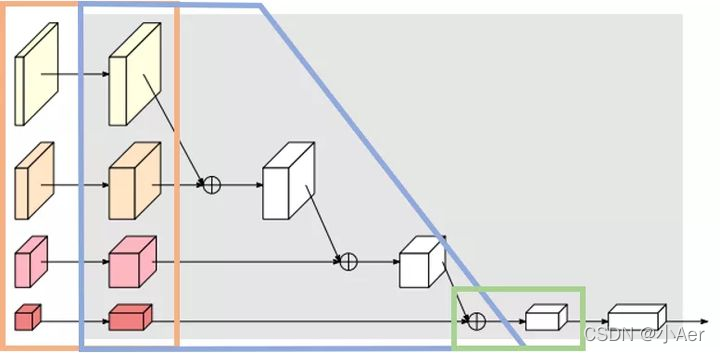
HRNet的neck可以分成三个部分,IncreLayer(橙色框),DownsampLayer(蓝色框)和FinalLayer(绿色框)。对每个backbone的输出分支进行升维操作,然后按照分辨率从大到小依次进行下采样同时从上到下逐级融合相加,最后用一个1x1conv升维。
Neck的整体code如下
def _make_neck(self, in_channels):
head_block = Bottleneck
self.incre_channels = [32, 64, 128, 256]
self.neck_out_channels = 2048
incre_modules = []
downsamp_modules = []
num_branches = len(self.in_channels)
for index in range(num_branches):
incre_module = self._make_layer(head_block, in_channels[index], incre_channels[index], 1, stride=1)
incre_modules.append(incre_module)
if index < num_branches - 1:
downsamp_in_channels = self.incre_channels[index] * incre_module.expansion
downsamp_out_channels = self.incre_channels[index+1] * incre_module.expansion
downsamp_module = nn.Sequential(
nn.Conv2d(in_channels=downsamp_in_channels, out_channels=downsamp_out_channels,
kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(downsamp_out_channels, momentum=0.1),
nn.ReLU(inplace=True)
)
downsamp_modules.append(downsamp_module)
incre_modules = nn.ModuleList(incre_modules)
downsamp_modules = nn.ModuleList(downsamp_modules)
final_layer = nn.Sequential(
nn.Conv2d(in_channels=self.out_channels[-1] * 4, out_channels=2048,
kernel_size=1, stride=1, padding=0),
nn.BatchNorm2d(2048, momentum=0.1),
nn.ReLU(inplace=True)
)
return incre_modules, downsamp_modules, fine_layer
def forward(self, x):
y = self.incre_modules[0](x[0])
for index in range(len(self.downsamp_modules)):
y = self.incre_modules[index+1](x[index+1]) + self.downsamp_modules[index](y)
y = self.final_layer(y)
y = F.avg_pool2d(y, kernel_size=y.size()[2:]).view(y.size(0), -1)
还有几个小细节
- BN层的momentom都设置为0.1
- stem使用的是两层stried为2的conv3x3
- FuseLayer的ReLU的inplace都设置为False
🍞整体代码设计
def forward(self, x):
# stem层使用两个strided 3x3conv进行快速降维
x=self.relu(self.bn1(self.conv1(x)))
x=self.relu(self.bn2(self.conv2(x)))
# 构建了一串BottleBlock构成的模块
x=self.layer1(x)
# 然后是多个stage,每个stage核心是调用HighResolutionModule模块(具体查看github,代码太多了)
# HighResolutionModule模块这个模块其实就是branches(BasicBlock)+FuseLayer
# 首先分别经过transition[1, 2, 3]模块
# 然后再分别经过stage[2, 3, 4](branches(BasicBlock)+FuseLayer=HighResolutionModule)
# 上面两个交叉进行,不是某个模块全执行完
x_list=[]
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list=self.stage2(x_list)
x_list=[]
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list=self.stage3(x_list)
x_list=[]
for i in range(self.stage4_cfg['NUM_BRANCHES']):
if self.transition3[i] is not None:
x_list.append(self.transition3[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list=self.stage4(x_list)
# 添加分类头,上文中有显示,在分类问题中添加这种头
# 在其他问题(姿态估计,语义分割,目标检测)中换用不同的头
y=self.incre_modules[0](y_list[0])
for i in range(len(self.downsamp_modules)):
y=self.incre_modules[i+1](y_list[i+1]) + \
self.downsamp_modules[i](y)
y=self.final_layer(y)
if torch._C._get_tracing_state():
# 在不写C代码的情况下执行forward,直接用python版本
y=y.flatten(start_dim=2).mean(dim=2)
else:
y=F.avg_pool2d(y, kernel_size=y.size()
[2:]).view(y.size(0), -1)
y=self.classifier(y)
return y
🧇实验
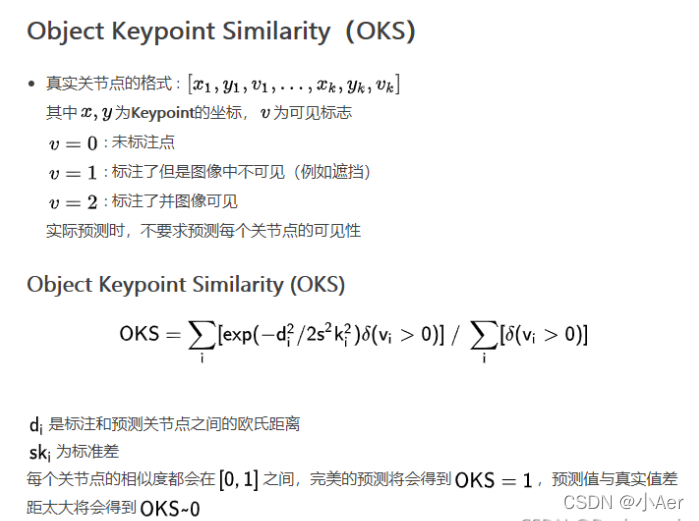
主要说一下评价指标吧
🧇Reference
[0] Deep High-Resolution Representation Learning
for Visual Recognition
[1] HRNet详解
[2] 打通多个视觉任务的全能Backbone:HRNet
[3] HRNet——个人学习记录
[4] https://www.cnblogs.com/dilthey/p/11182948.html
[5] https://zhuanlan.zhihu.com/p/143385915

