

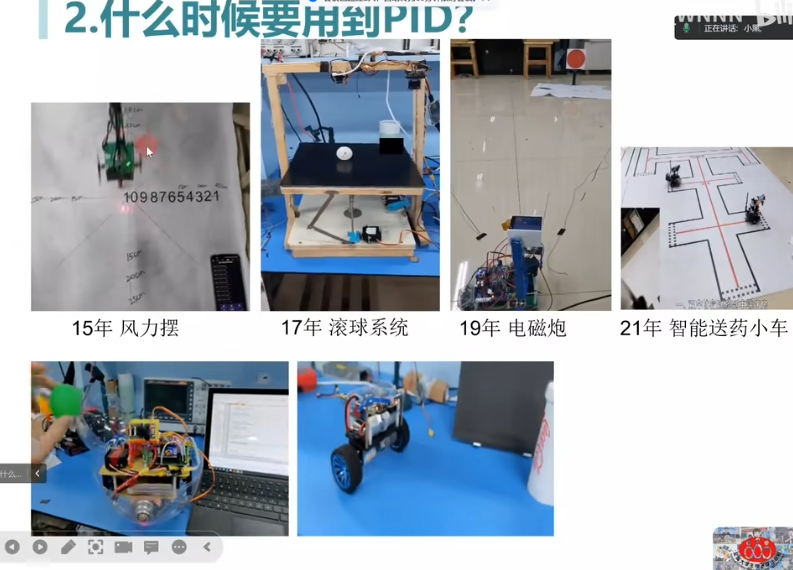
STM32平衡小车学习笔记
传感器
电机编码器
测速:
单位换算需要知道电机减速比、线速(轮径?)、四倍频
陀螺仪
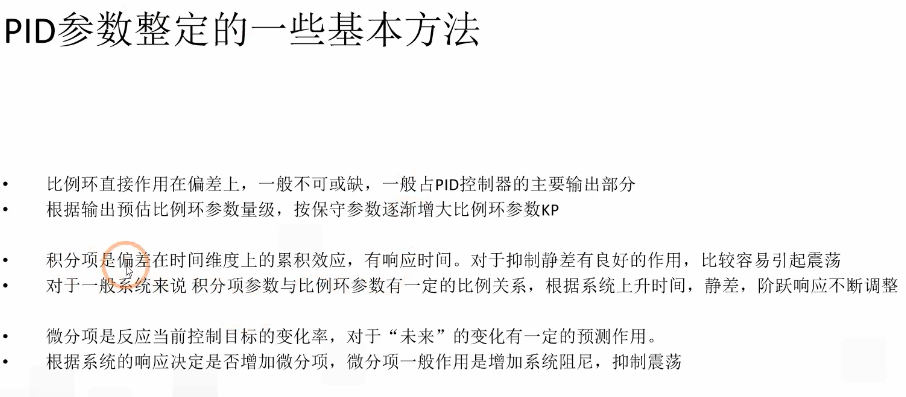
PID算法教程
PID算法
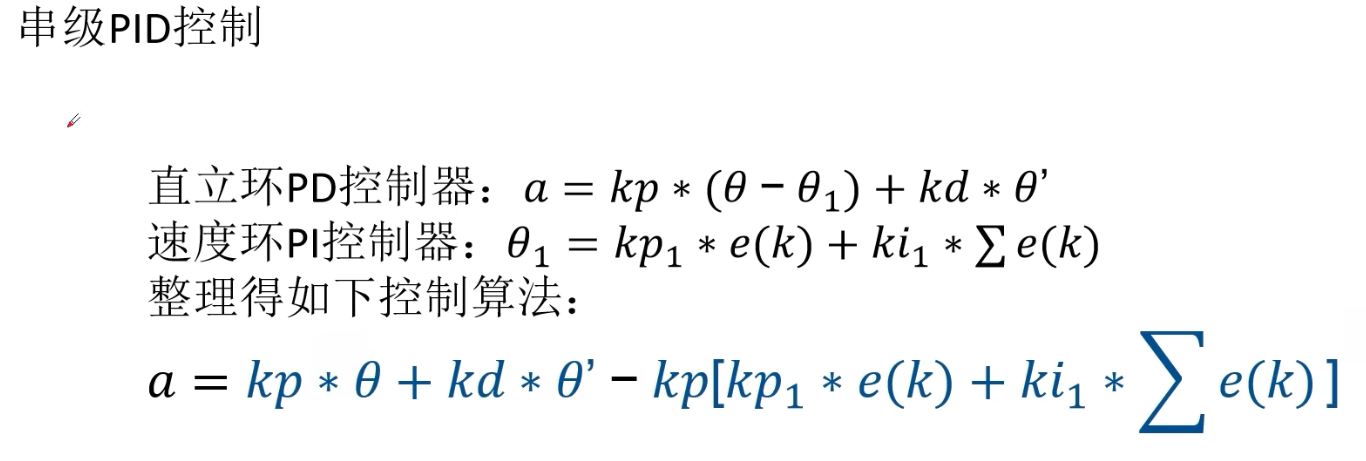
速度与位置串级PID
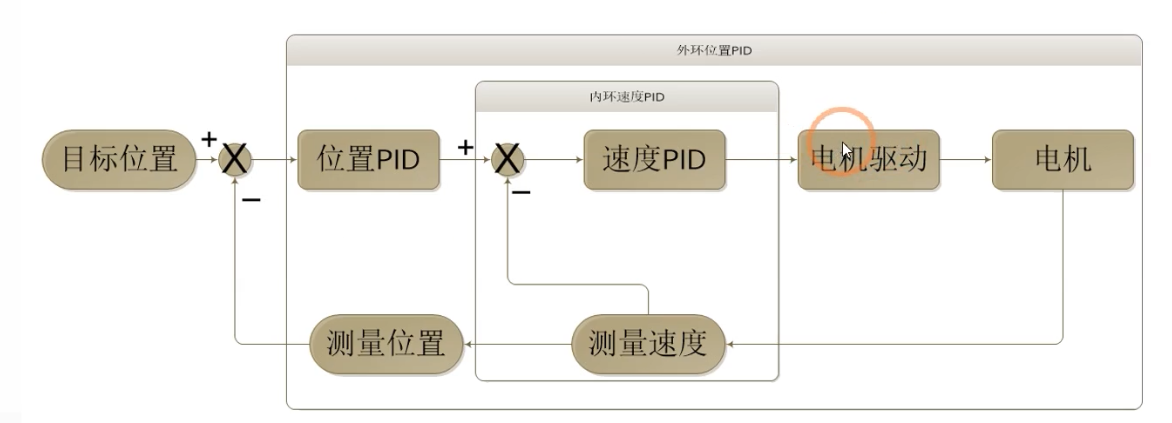
速度环是PI控制器,直立环是PD控制器。
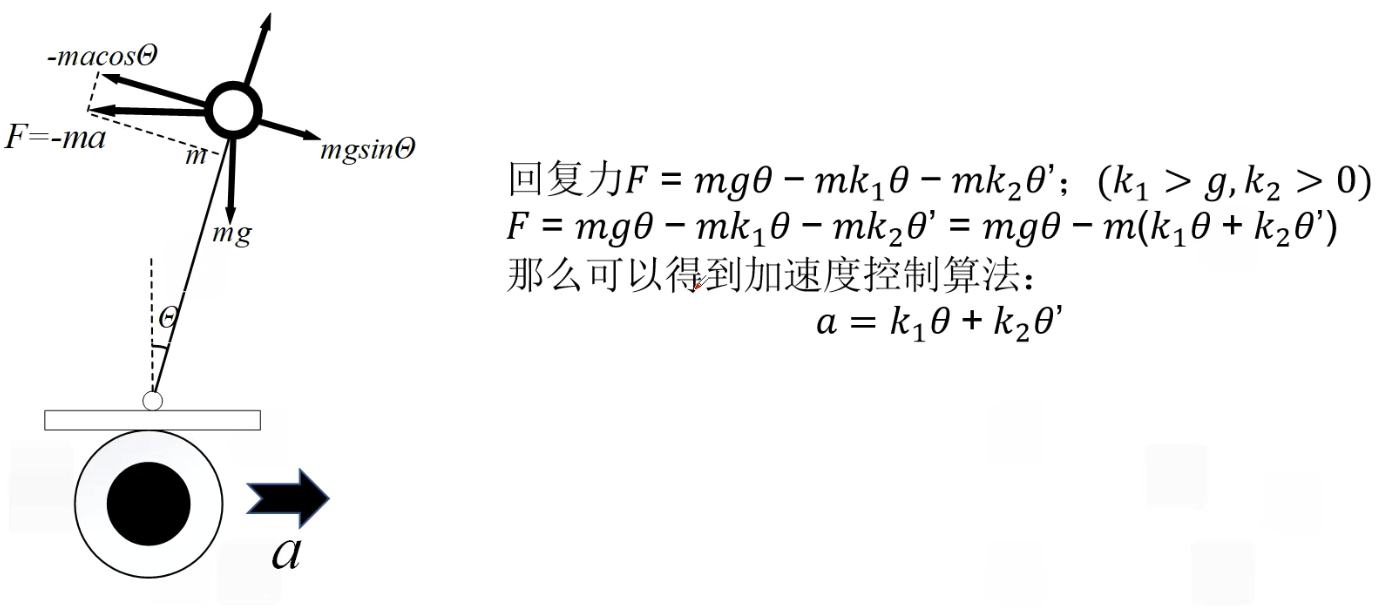
直立控制
调试工具
1.轮趣科技的APP配合STM32代码
2.VOFA+
使用VOFA+工具用于调试PID算法
平衡小车开源方案
STM32F103C8T6平衡小车制作教程@B站.会飞的摄影师吖
使用HAL库,代码开源,PCB开源。已初步复刻成功。2023.8.23



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具