机器学习——残差网络
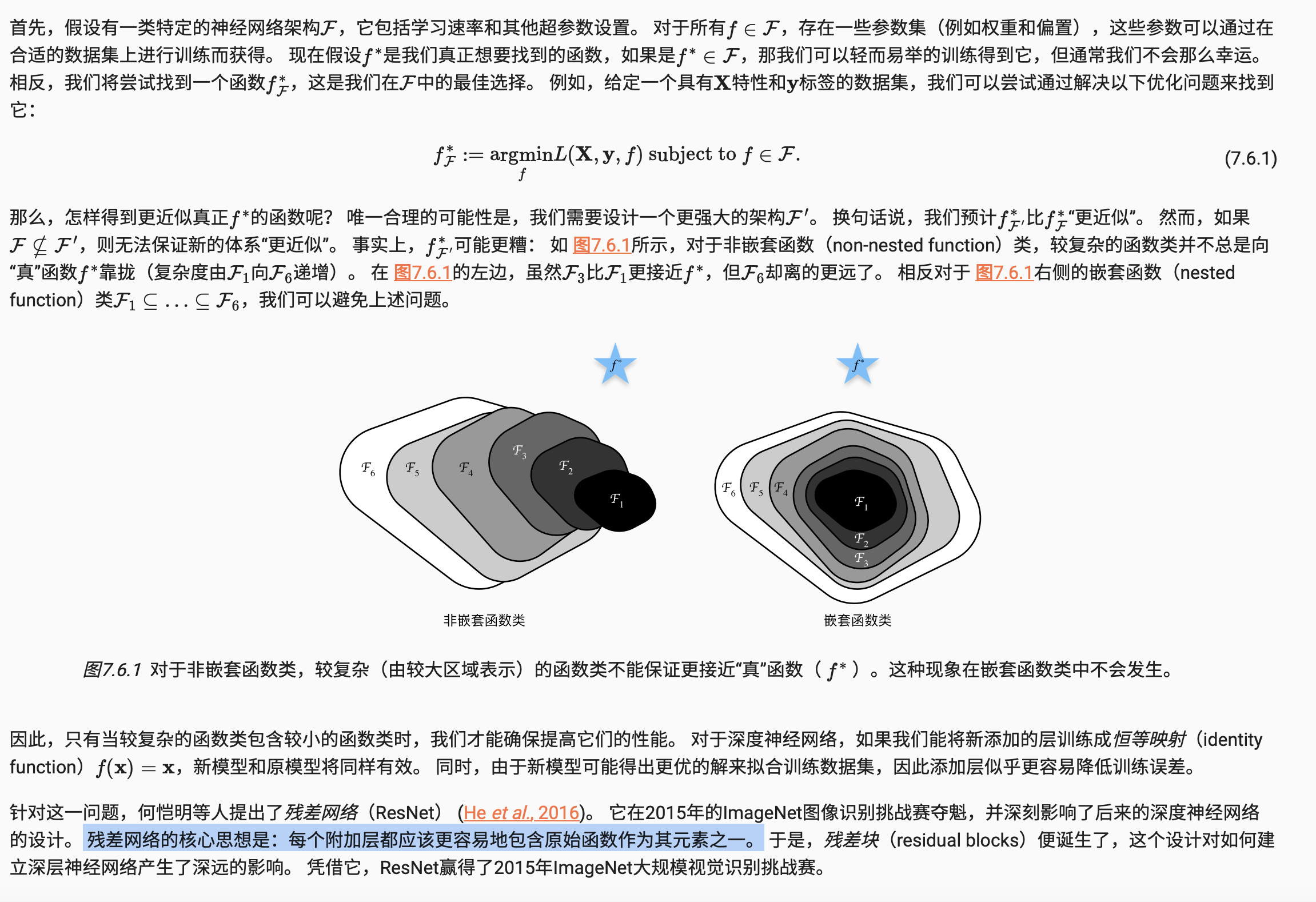
函数类
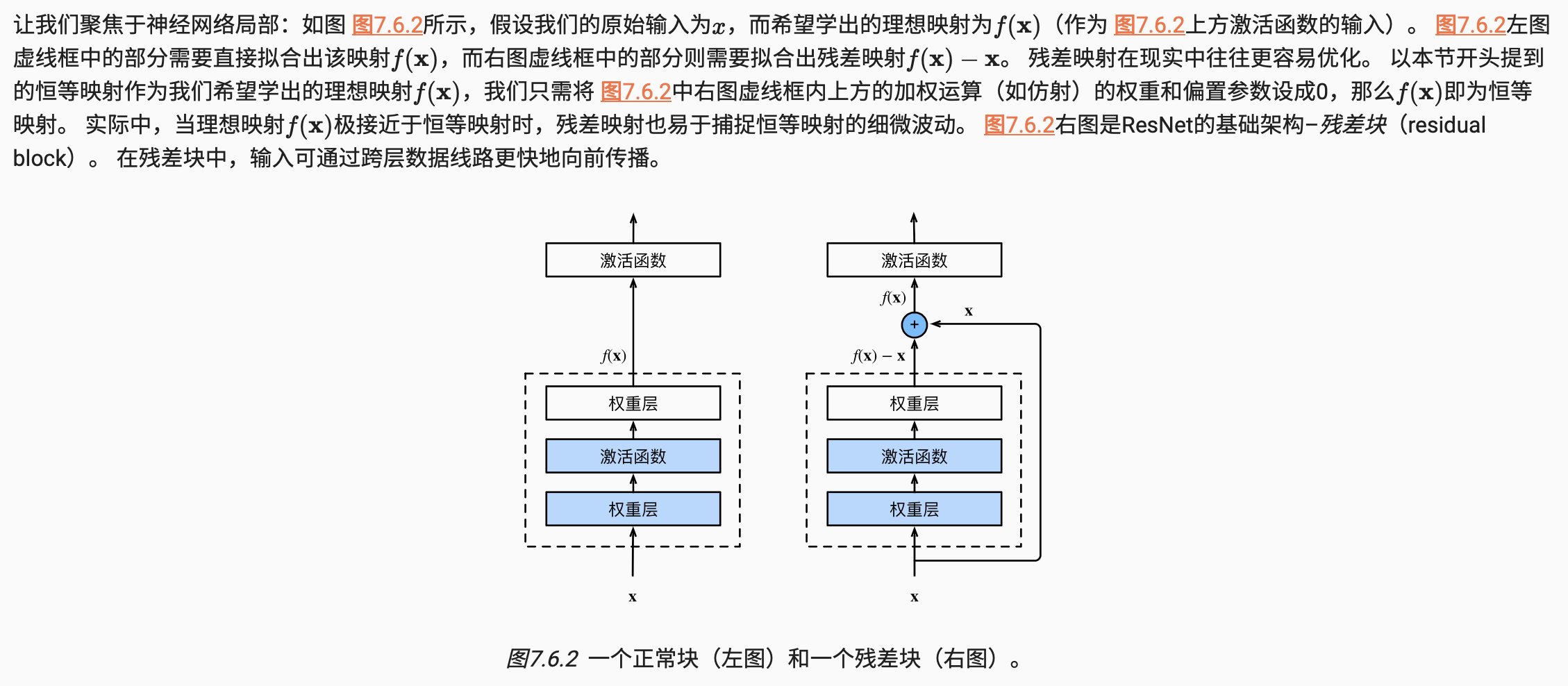
残差块


import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
class Residual(nn.Module): #@save
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
下面我们来查看输入和输出形状一致的情况。
blk = Residual(3,3) X = torch.rand(4, 3, 6, 6) Y = blk(X) Y.shape
torch.Size([4, 3, 6, 6])
我们也可以在增加输出通道数的同时,减半输出的高和宽。
blk = Residual(3,6, use_1x1conv=True, strides=2) blk(X).shape
torch.Size([4, 6, 3, 3])
ResNet模型
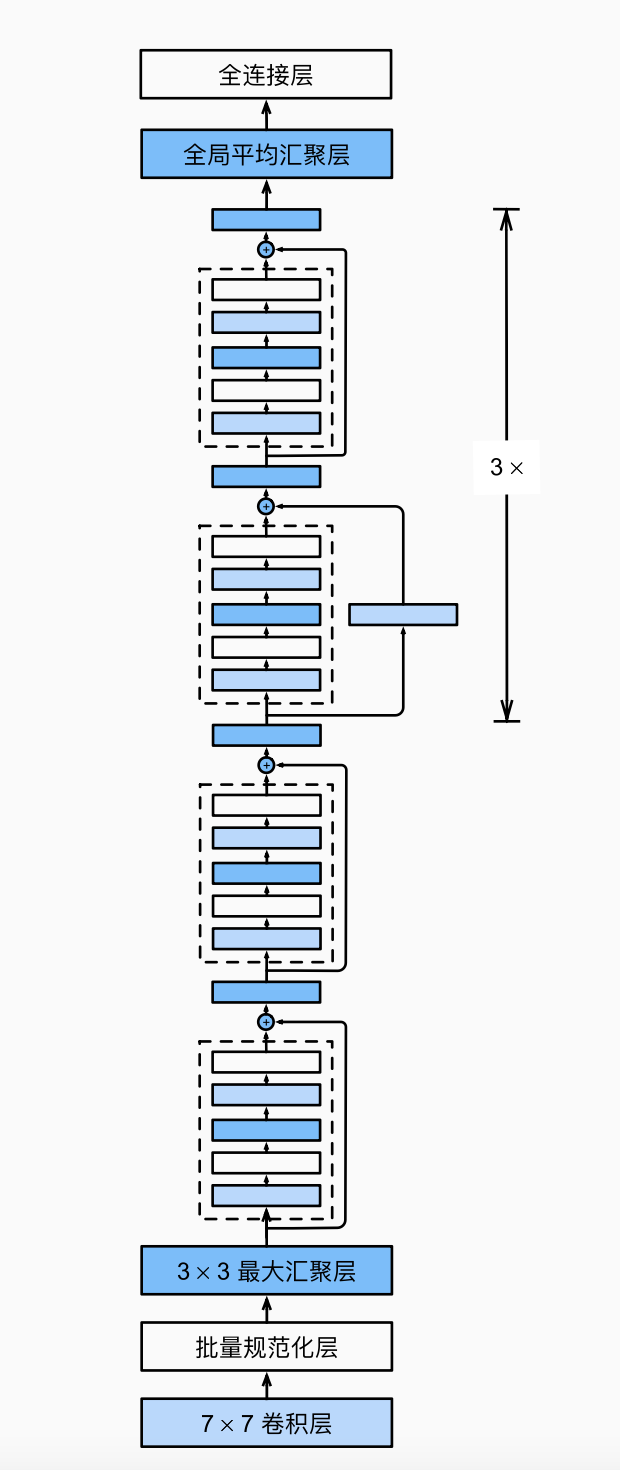
ResNet的前两层跟之前介绍的GoogLeNet中的一样: 在输出通道数为64、步幅为2的卷积层后,接步幅为2的最大汇聚层。 不同之处在于ResNet每个卷积层后增加了批量规范化层。
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。 ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。 第一个模块的通道数同输入通道数一致。 由于之前已经使用了步幅为2的最大汇聚层,所以无须减小高和宽。 之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,我们对第一个模块做了特别处理。
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
接着在ResNet加入所有残差块,这里每个模块使用2个残差块。
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True)) b3 = nn.Sequential(*resnet_block(64, 128, 2)) b4 = nn.Sequential(*resnet_block(128, 256, 2)) b5 = nn.Sequential(*resnet_block(256, 512, 2))
最后,与GoogLeNet一样,在ResNet中加入全局平均汇聚层,以及全连接层输出。
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
在训练ResNet之前,让我们观察一下ResNet中不同模块的输入形状是如何变化的。 在之前所有架构中,分辨率降低,通道数量增加,直到全局平均汇聚层聚集所有特征。
X = torch.rand(size=(1, 1, 224, 224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t', X.shape)
Sequential output shape: torch.Size([1, 64, 56, 56]) Sequential output shape: torch.Size([1, 64, 56, 56]) Sequential output shape: torch.Size([1, 128, 28, 28]) Sequential output shape: torch.Size([1, 256, 14, 14]) Sequential output shape: torch.Size([1, 512, 7, 7]) AdaptiveAvgPool2d output shape: torch.Size([1, 512, 1, 1]) Flatten output shape: torch.Size([1, 512]) Linear output shape: torch.Size([1, 10])
虽然ResNet的主体架构跟GoogLeNet类似,但ResNet架构更简单,修改也更方便。这些因素都导致了ResNet迅速被广泛使用。
总结
-
学习嵌套函数(nested function)是训练神经网络的理想情况。在深层神经网络中,学习另一层作为恒等映射(identity function)较容易(尽管这是一个极端情况)。
-
残差映射可以更容易地学习同一函数(指的是当 H(x)=x 时,残差映射 F(x) 为零),例如将权重层中的参数近似为零。
-
利用残差块(residual blocks)可以训练出一个有效的深层神经网络:输入可以通过层间的残余连接更快地向前传播。
-
残差网络(ResNet)对随后的深层神经网络设计产生了深远影响。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号