



从本质上讲,深度残差收缩网络属于卷积神经网络,是深度残差网络(deep residual network, ResNet)的一个变种。它的核心思想在于,在深度学习进行特征学习的过程中,剔除冗余信息是非常重要的;软阈值化是一种非常灵活的、删除冗余信息的方式。
1.深度残差网络
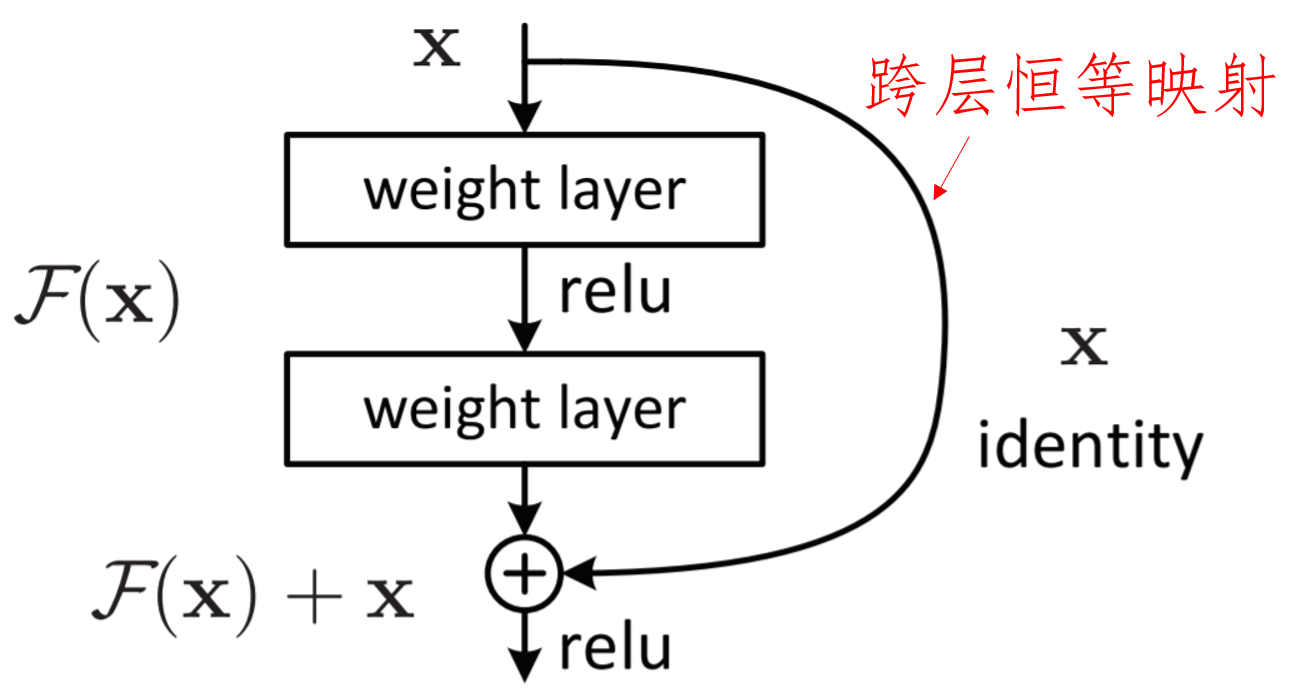
首先,在介绍深度残差收缩网络的时候,经常需要从深度残差网络开始讲起。下图展示了深度残差网络的基本模块,包括一些非线性层(残差路径)和一个跨层的恒等连接。恒等连接是深度残差网络的核心,是其优异性能的一个保障。
2.深度残差收缩网络
深度残差收缩网络,就是对深度残差网络的残差路径进行收缩的一种网络。这里的“收缩”指的就是软阈值化。
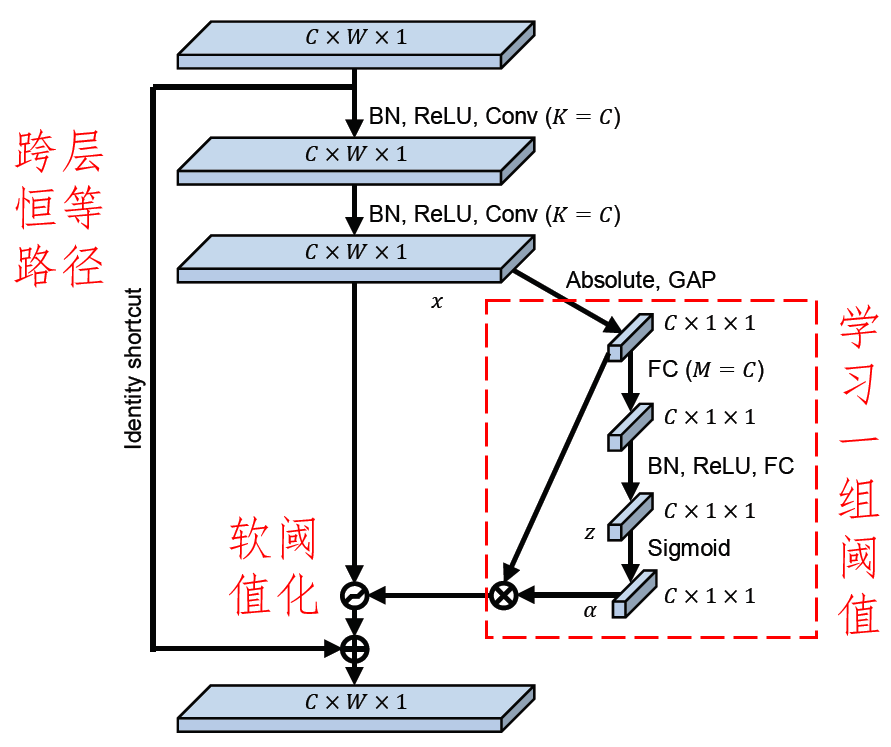
软阈值化是许多信号降噪方法的核心步骤,它是将接近于零(或者说绝对值低于某一阈值τ)的特征置为0,也就是将[-τ, τ]区间内的特征置为0,让其他的、距0较远的特征也朝着0进行收缩。
如果和前一个卷积层的偏置b放在一起看的话,这个置为零的区间就变成了[-τ+b, τ+b]。因为τ和b都是可以自动学习得到的参数,这个角度看的话,软阈值化其实是可以将任意区间的特征置为零,是一种更灵活的、删除某个取值范围特征的方式,也可以理解成一种更灵活的非线性映射。
从另一个方面来看,前面的两个卷积层、两个批标准化和两个激活函数,将冗余信息的特征,变换成接近于零的值;将有用的特征,变换成远离零的值。之后,通过自动学习得到一组阈值,利用软阈值化将冗余特征剔除掉,将有用特征保留下来。
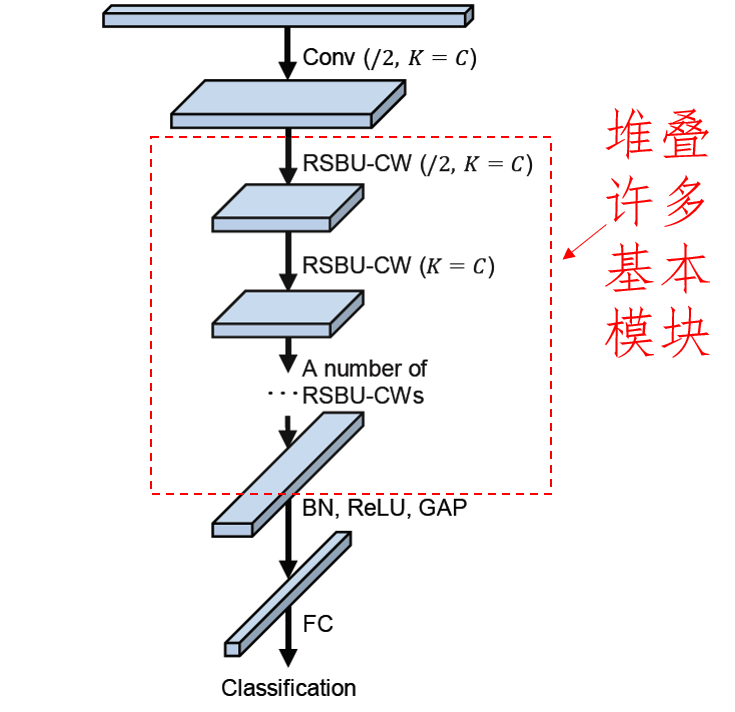
通过堆叠一定数量的基本模块,可以构成完整的深度残差收缩网络,如下图所示:
3.图像识别及Keras编程
虽然深度残差收缩网络原先是应用于基于振动信号的故障诊断,但是深度残差收缩网络事实上是一种通用的特征学习方法,相信在很多任务(计算机视觉、语音、文本)中都可能有一定的用处。
下面是基于深度残差收缩网络的MNIST手写数字识别程序(程序很简单,仅供参考):
#!/usr/bin/env python3 # -*- coding: utf-8 -*- """ Created on Sat Dec 28 23:24:05 2019 Implemented using TensorFlow 1.0.1 and Keras 2.2.1 M. Zhao, S. Zhong, X. Fu, et al., Deep Residual Shrinkage Networks for Fault Diagnosis, IEEE Transactions on Industrial Informatics, 2019, DOI: 10.1109/TII.2019.2943898 @author: me """ from __future__ import print_function import keras import numpy as np from keras.datasets import mnist from keras.layers import Dense, Conv2D, BatchNormalization, Activation from keras.layers import AveragePooling2D, Input, GlobalAveragePooling2D from keras.optimizers import Adam from keras.regularizers import l2 from keras import backend as K from keras.models import Model from keras.layers.core import Lambda K.set_learning_phase(1) # Input image dimensions img_rows, img_cols = 28, 28 # The data, split between train and test sets (x_train, y_train), (x_test, y_test) = mnist.load_data() if K.image_data_format() == 'channels_first': x_train = x_train.reshape(x_train.shape[0], 1, img_rows, img_cols) x_test = x_test.reshape(x_test.shape[0], 1, img_rows, img_cols) input_shape = (1, img_rows, img_cols) else: x_train = x_train.reshape(x_train.shape[0], img_rows, img_cols, 1) x_test = x_test.reshape(x_test.shape[0], img_rows, img_cols, 1) input_shape = (img_rows, img_cols, 1) # Noised data x_train = x_train.astype('float32') / 255. + 0.5*np.random.random([x_train.shape[0], img_rows, img_cols, 1]) x_test = x_test.astype('float32') / 255. + 0.5*np.random.random([x_test.shape[0], img_rows, img_cols, 1]) print('x_train shape:', x_train.shape) print(x_train.shape[0], 'train samples') print(x_test.shape[0], 'test samples') # convert class vectors to binary class matrices y_train = keras.utils.to_categorical(y_train, 10) y_test = keras.utils.to_categorical(y_test, 10) def abs_backend(inputs): return K.abs(inputs) def expand_dim_backend(inputs): return K.expand_dims(K.expand_dims(inputs,1),1) def sign_backend(inputs): return K.sign(inputs) def pad_backend(inputs, in_channels, out_channels): pad_dim = (out_channels - in_channels)//2 return K.spatial_3d_padding(inputs, padding = ((0,0),(0,0),(pad_dim,pad_dim))) # Residual Shrinakge Block def residual_shrinkage_block(incoming, nb_blocks, out_channels, downsample=False, downsample_strides=2): residual = incoming in_channels = incoming.get_shape().as_list()[-1] for i in range(nb_blocks): identity = residual if not downsample: downsample_strides = 1 residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides), padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) # Calculate global means residual_abs = Lambda(abs_backend)(residual) abs_mean = GlobalAveragePooling2D()(residual_abs) # Calculate scaling coefficients scales = Dense(out_channels, activation=None, kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(abs_mean) scales = BatchNormalization()(scales) scales = Activation('relu')(scales) scales = Dense(out_channels, activation='sigmoid', kernel_regularizer=l2(1e-4))(scales) scales = Lambda(expand_dim_backend)(scales) # Calculate thresholds thres = keras.layers.multiply([abs_mean, scales]) # Soft thresholding sub = keras.layers.subtract([residual_abs, thres]) zeros = keras.layers.subtract([sub, sub]) n_sub = keras.layers.maximum([sub, zeros]) residual = keras.layers.multiply([Lambda(sign_backend)(residual), n_sub]) # Downsampling (it is important to use the pooL-size of (1, 1)) if downsample_strides > 1: identity = AveragePooling2D(pool_size=(1,1), strides=(2,2))(identity) # Zero_padding to match channels (it is important to use zero padding rather than 1by1 convolution) if in_channels != out_channels: identity = Lambda(pad_backend)(identity, in_channels, out_channels) residual = keras.layers.add([residual, identity]) return residual # define and train a model inputs = Input(shape=input_shape) net = Conv2D(8, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(inputs) net = residual_shrinkage_block(net, 1, 8, downsample=True) net = BatchNormalization()(net) net = Activation('relu')(net) net = GlobalAveragePooling2D()(net) outputs = Dense(10, activation='softmax', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(net) model = Model(inputs=inputs, outputs=outputs) model.compile(loss='categorical_crossentropy', optimizer=Adam(), metrics=['accuracy']) model.fit(x_train, y_train, batch_size=100, epochs=5, verbose=1, validation_data=(x_test, y_test)) # get results K.set_learning_phase(0) DRSN_train_score = model.evaluate(x_train, y_train, batch_size=100, verbose=0) print('Train loss:', DRSN_train_score[0]) print('Train accuracy:', DRSN_train_score[1]) DRSN_test_score = model.evaluate(x_test, y_test, batch_size=100, verbose=0) print('Test loss:', DRSN_test_score[0]) print('Test accuracy:', DRSN_test_score[1])
为方便对比,深度残差网络的代码如下:
#!/usr/bin/env python3 # -*- coding: utf-8 -*- """ Created on Sat Dec 28 23:19:03 2019 Implemented using TensorFlow 1.0 and Keras 2.2.1 K. He, X. Zhang, S. Ren, J. Sun, Deep Residual Learning for Image Recognition, CVPR, 2016. @author: me """ from __future__ import print_function import numpy as np import keras from keras.datasets import mnist from keras.layers import Dense, Conv2D, BatchNormalization, Activation from keras.layers import AveragePooling2D, Input, GlobalAveragePooling2D from keras.optimizers import Adam from keras.regularizers import l2 from keras import backend as K from keras.models import Model from keras.layers.core import Lambda K.set_learning_phase(1) # input image dimensions img_rows, img_cols = 28, 28 # the data, split between train and test sets (x_train, y_train), (x_test, y_test) = mnist.load_data() if K.image_data_format() == 'channels_first': x_train = x_train.reshape(x_train.shape[0], 1, img_rows, img_cols) x_test = x_test.reshape(x_test.shape[0], 1, img_rows, img_cols) input_shape = (1, img_rows, img_cols) else: x_train = x_train.reshape(x_train.shape[0], img_rows, img_cols, 1) x_test = x_test.reshape(x_test.shape[0], img_rows, img_cols, 1) input_shape = (img_rows, img_cols, 1) # Noised data x_train = x_train.astype('float32') / 255. + 0.5*np.random.random([x_train.shape[0], img_rows, img_cols, 1]) x_test = x_test.astype('float32') / 255. + 0.5*np.random.random([x_test.shape[0], img_rows, img_cols, 1]) print('x_train shape:', x_train.shape) print(x_train.shape[0], 'train samples') print(x_test.shape[0], 'test samples') # convert class vectors to binary class matrices y_train = keras.utils.to_categorical(y_train, 10) y_test = keras.utils.to_categorical(y_test, 10) def pad_backend(inputs, in_channels, out_channels): pad_dim = (out_channels - in_channels)//2 return K.spatial_3d_padding(inputs, padding = ((0,0),(0,0),(pad_dim,pad_dim))) def residual_block(incoming, nb_blocks, out_channels, downsample=False, downsample_strides=2): residual = incoming in_channels = incoming.get_shape().as_list()[-1] for i in range(nb_blocks): identity = residual if not downsample: downsample_strides = 1 residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, strides=(downsample_strides, downsample_strides), padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) residual = BatchNormalization()(residual) residual = Activation('relu')(residual) residual = Conv2D(out_channels, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(residual) # Downsampling (it is important to use the pooL-size of (1, 1)) if downsample_strides > 1: identity = AveragePooling2D(pool_size=(1, 1), strides=(2, 2))(identity) # Zero_padding to match channels (it is important to use zero padding rather than 1by1 convolution) if in_channels != out_channels: identity = Lambda(pad_backend)(identity, in_channels, out_channels) residual = keras.layers.add([residual, identity]) return residual # define and train a model inputs = Input(shape=input_shape) net = Conv2D(8, 3, padding='same', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(inputs) net = residual_block(net, 1, 8, downsample=True) net = BatchNormalization()(net) net = Activation('relu')(net) net = GlobalAveragePooling2D()(net) outputs = Dense(10, activation='softmax', kernel_initializer='he_normal', kernel_regularizer=l2(1e-4))(net) model = Model(inputs=inputs, outputs=outputs) model.compile(loss='categorical_crossentropy', optimizer=Adam(), metrics=['accuracy']) model.fit(x_train, y_train, batch_size=100, epochs=5, verbose=1, validation_data=(x_test, y_test)) # get results K.set_learning_phase(0) resnet_train_score = model.evaluate(x_train, y_train, batch_size=100, verbose=0) print('Train loss:', resnet_train_score[0]) print('Train accuracy:', resnet_train_score[1]) resnet_test_score = model.evaluate(x_test, y_test, batch_size=100, verbose=0) print('Test loss:', resnet_test_score[0]) print('Test accuracy:', resnet_test_score[1])
备注:
(1)深度残差收缩网络的结构比普通的深度残差网络复杂,也许更难训练。
(2)程序里只设置了一个基本模块,在更复杂的数据集上,可适当增加。
(3)如果遇到这个TypeError:softmax() got an unexpected keyword argument 'axis',就点开tensorflow_backend.py,将return tf.nn.softmax(x, axis=axis)中的第一个axis改成dim即可。
转载网址:
https://segmentfault.com/a/1190000021437510
参考文献:
M. Zhao, S. Zhong, X. Fu, et al., Deep residual shrinkage networks for fault diagnosis, IEEE Transactions on Industrial Informatics, 2019, DOI: 10.1109/TII.2019.2943898

