Reading a IMU Without Kalman: The Complementary Filter - 阅读要点
原文:http://www.pieter-jan.com/node/11
目标是将惯性测量元件(IMU)之中陀螺仪、加速计的数据结合使用。Kalman filter太复杂,在微机上倾向用一种更简单的方法:Complementary filter
姿态估计(获得3个角度,俯仰角、横滚角、偏航角):
陀螺仪测角原理是对角速度积分
加速计可获取重力方向角
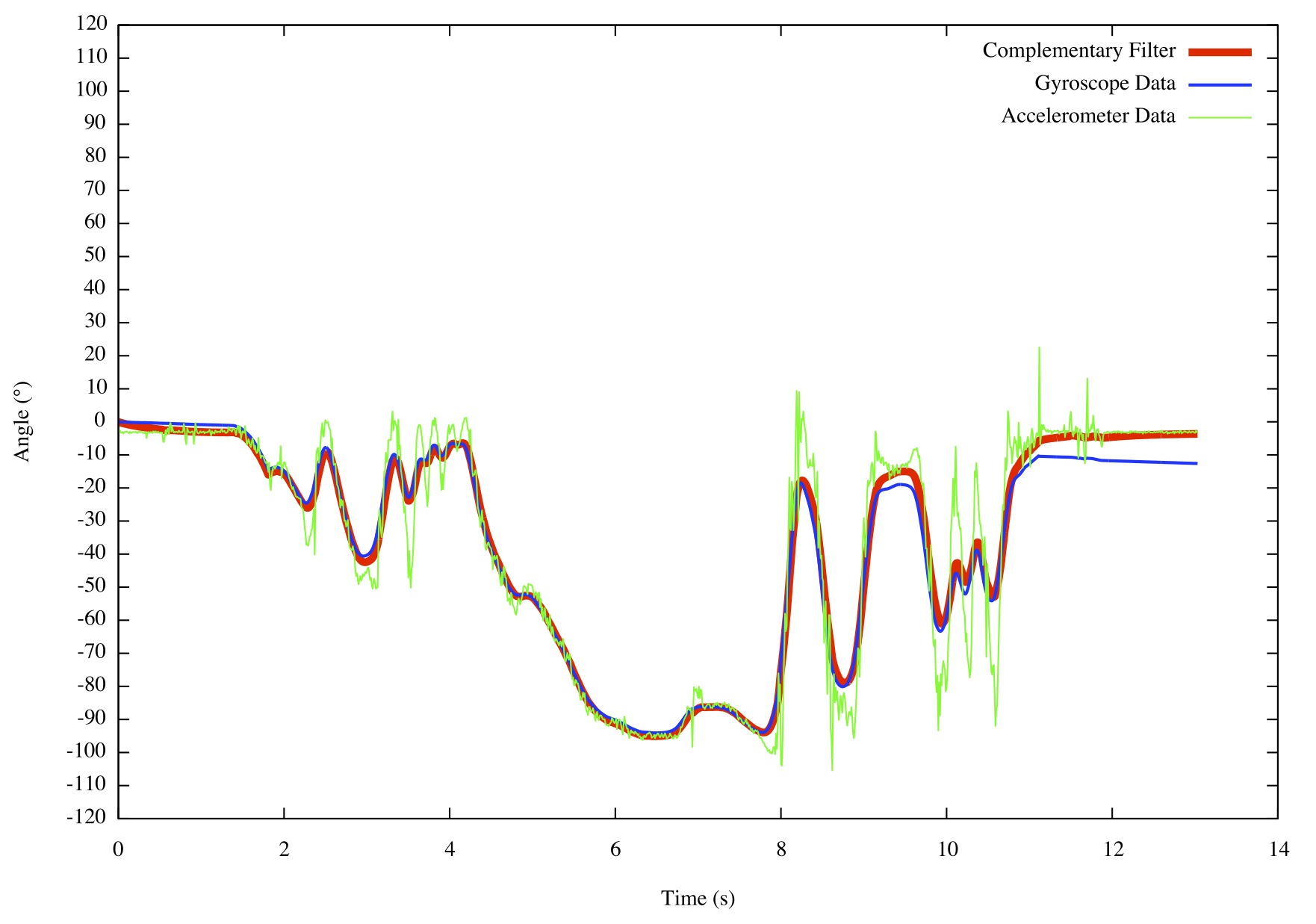
加速计的问题:测量四翼飞行器会算入额外的外部动力,因此短期不准确、只有长期有效
陀螺仪的问题:由于做积分,长期作用会导致角度漂移(角度复位不归零),因此短期有效、长期不准确
用加速计数据对陀螺仪数据进行修正。加速计在有效测量范围时,进行补偿:

结果: