


基于CANoe实现的TBOX自动化测试(含代码)
直奔主题,搭个台架,编程自动化测试
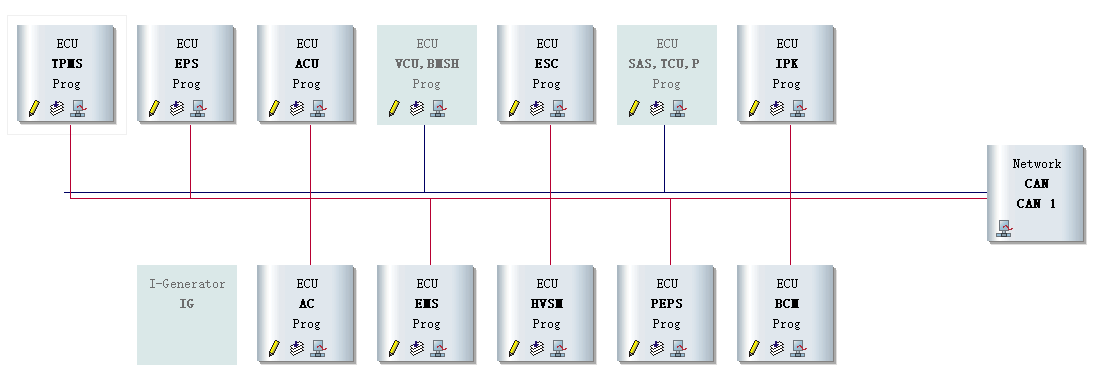
1. 关联的ECU梳理与设计分析
罗列所有产生系统交互的控制器。设计思路如下4步,下文代码中会逐步说明。
-
每个ECU的逻辑都是随CANoe启动,激活CAN通信;
-
根据PEPS电源信号状态决定该ECU的活跃状态;
-
ECU 根据具体业务处理总线上的请求;
-
设计仿真器的ECU则根据信号变化情况,更新仿真器的状态
2. 建立车内网络仿真模型
3. CAPL编程实现
3.1 环境变量定义
为实现控制面板输入输出与信号同步,实现仿真器的状态更新,先定义与信号成映射关系的环境变量。环境变量的定义主要根据各ECU的相关信号与业务的关联度决定。基本上与TSP业务挂钩的信号都应该设置相应的环境变量,监控信号变化,实时更新仿真器的状态。
3.2 ECU通用代码块实现


variables { // 报文发送周期, 单位ms const int varCycTime10 = 10; const int varCycTime20 = 20; const int varCycTime50 = 50; const int varCycTime100 = 100; const int varCycTime200 = 200; const int varCycTime500 = 500; const int varCycTime1000 = 1000; // varCarType车型定义, 0=纯油, 1=纯电, 2=混动, others=error // 字母代码 AFV=纯油, EV=纯电, HEV=混动(不区分直插式和充电桩式) // 全局LOG long mTrace = 0; //severity dword INFO = 1; dword WARN = 2; dword ERROR = 3; // 鉴权秘钥 byte varESKCode[10][8] = { //。。。略 }; // varCarCode 标记当前被测车型, 用于选择调用正确的鉴权码 int varESKNumber; // 记录当前电源模式,0=OFF; 1=ACC; 2=ON; 3=reserved; 4=start; 5,6,7=reserved int varPowerMode=0; int lastPowerMode=0; // 发动机状态 int varEngineStatus; //总线报文管理,0=停发, 1=启动 int varNM;// 远程控制请求中,启动发动机的时间 int varRmStartTime; // 远程控制请求中,启动发动机的时间长度 分级 int varRmStartTimeLvl; ////0=No Req; 1=3min; 2=5min; 3=8min; 4=10min; 5,6,7=reserved // // 防盗报警定时器 // timer BCM_ATWS_timer; //车速 int varVelSpeed; //标记发动机是否已启动 int IsEngineWorking = 0; } /*********************************************************** * description : 全局日志记录函数 * parameter : None * creation date: 2018/10/26 * author : xxx * revision date: * revision log : * modifier : ***********************************************************/ void InitLogging() { mTrace = writeCreate("Logging"); writeConfigure(mTrace,1024*1000,1,"..\\Proj\\Log\\write.txt"); writeclear(1); }
3.3 业务逻辑封装举例
-
ESC封装车速信号,处理行车过程中自动落锁的逻辑
includes { #include "ECUsVar.can" } variables { //本消息由ESC发出,包含ESC状态,车速、以及刹车板状态信号, 此处ID由我捏造为0x111 message 0x111 ESC_Status; msTimer ESC_timer; } on timer ESC_timer { output(ESC_Status); setTimer(ESC_timer, varCycTime20); } //车速 on envVar ESC_VehicleSpeed { float factor = 0.05625; int offset = 0; varVelSpeed = getValue(ESC_VehicleSpeed); //转换成仪表显示, KPH if(varPowerMode!=2) { writeDbgLevel(1, "PowerMode=OFF,车速调节无效"); ESC_Status.ESC_VehicleSpeed = 0; putValue(ESC_VehicleSpeed, 0); } else { if(varVelSpeed!=0) //置位发动机转速 { writeDbgLevel(1, "点火状态,车速不为零,设置发动机转速"); putValue(EMS_EngineSpeedRPM,3000); } else { putValue(EMS_EngineSpeedRPM,0); } if(varVelSpeed>25) //车速>25时,自动落锁 { writeDbgLevel(1,"车速>25码,自动落锁"); putValue(LockDoors, 1); } ESC_Status.ESC_VehicleSpeed = (varVelSpeed-offset)/ factor; } } on envVar PEPS_PowerMode { // 此处根据PEPS电源状态封装ESC在网络上的活跃情况(是否对外发送信号和处理总线上的请求) } on start { InitESCValue(); ActiveESC(); } //初始化 void InitESCValue() { varPowerMode = getValue(PEPS_PowerMode); //以下两行代码初始化ESC信号,此处略去其它很多信号,自填...... putValue(ESC_VehicleSpeed, 0); ESC_Status.xxx=0; } //激活 void ActiveESC() { setTimer(ESC_timer, varCycTime20); } //去激活 void InactiveESC() { cancelTimer(ESC_timer); }
3.4 系统时钟同步
variables { const h_offset = 0;//5; //时差 const m_offset = 0;//5; //分差 // IPK提供日期时间信息, 年月日,时分秒;500ms message 0x222 IPK_DateTime; //以下报文ID全由我捏造,可根据实际DBC中定义修改成相应ID // IPK提供纯电续航里程、平均电耗、瞬时电耗、油耗, 1000ms message 0x223 IPK_Data; // 本消息由IPK发出,包含仪表的信息,100ms // 安全气囊控制器状态检查反馈,剩余油量,平均车速,手刹状态,保养提示报警,背光调节,机油压力低报警状态 message 0x224 IPK_STS; // 本消息由IPK发出,包含总里程的信息,可续航里程,保养里程;1000ms message 0x225 IPK_Odometer; msTimer IPK_Date_timer; msTimer IPK_ODO_timer; msTimer IPK_Sts_timer; //当前时间提示器, 用来核对TBOX系统时间是否正确 timer DateRemanderTimer; // 存放时间的数组,当IPK负载不存在时,仿真实现。传递时间到TBOX long tm[9]; char t_canoe[26]; char t_now[26]; } *********************************************************** * description : 由IPK发出的系统时间,传递给TBOX同步此时间 * parameter : None * creation date: 2018/10/15 * author : xxx * revision date: * revision log : * modifier : ***********************************************************/ on timer IPK_Date_timer { output(IPK_DateTime); setTimer(IPK_Date_timer, varCycTime500); } /*********************************************************** * description : 由IPK发出的仪表盘信息 * parameter : None * creation date: 2018/10/15 * author : xxx * revision date: * revision log : * modifier : ***********************************************************/ on timer IPK_Sts_timer { GetSysTime(); output(IPK_STS); setTimer(IPK_Sts_timer, varCycTime100); } /*********************************************************** * description : 由IPK发出的里程相关信息,可能会根据油车,混动,纯电,展示的信息不一致,根据DBC定义来实现 * parameter : None * creation date: 2018/10/15 * author : xxx * revision date: * revision log : * modifier : ***********************************************************/ on timer IPK_ODO_timer { output(IPK_Odometer); setTimer(IPK_AFV_ODO_timer, varCycTime1000); }/*********************************************************** * description : 获取当前PC时间,作为IPK时间发布到CAN线上 * parameter : None * creation date: 2018/10/15 * author : xxx * revision date: * revision log : * modifier : ***********************************************************/ void GetSysTime() { getLocalTimeString(t_canoe); getLocalTime(tm); // year since 1900; month from 0-11 IPK_DateTime.IPK_Year = tm[5]-100; IPK_DateTime.IPK_Month = tm[4]+1; IPK_DateTime.IPK_Second = tm[0]; //以上API获取的时间比北京时间快6h 5min if(tm[2]>=h_offset) //24小时制 { IPK_DateTime.IPK_Hour = tm[2]-h_offset; //减去快的6H IPK_DateTime.IPK_Day = tm[3]; } else { IPK_DateTime.IPK_Hour = tm[2] -h_offset+24; //当时间跳到第二天凌晨,逆向+18 IPK_DateTime.IPK_Day = tm[3] -1; // day-1 } if(tm[1]>=m_offset) //处理分钟 { IPK_DateTime.IPK_Minute = tm[1] -m_offset; } else { IPK_DateTime.IPK_Minute = tm[1] -m_offset + 60; //此时小时跨度要再减一小时 IPK_DateTime.IPK_Hour = tm[2]-(h_offset+1); //减去快的6H and 跨时段1 } //格式化当前时间戳 snprintf(t_now, elcount(t_now),"%d/%d/%d %02d:%02d:%02d", tm[5]+1900, tm[4]+1, tm[3], IPK_DateTime.IPK_Hour,IPK_DateTime.IPK_Minute,tm[0]); } //log输出 提示作用 on timer DateRemanderTimer { writeDbgLevel(1, "CANoe Time: %s", t_canoe); writeDbgLevel(1, "Now Time:%s", t_now); setTimer(DateRemanderTimer, varCycTime10); } //激活IPK(当电源ON时,触发) //去激活IPK(当电源OFF时,停发IPK报文)// 设置每次启动CANoe时,仪表盘的初值//电源模式变更时,处理IPK在总线上的活跃状态 //以下代码举两个例子描述,具体信号的变化,呈现在控制面板上的为物理值。其余信号可自己根据样板添加 //平均油耗 L/100Km on envVar IPK_AverageFuelConsumption { int temp; //偏移量与精度值 float factor = 0.01; int offset = 0; temp = getValue(IPK_AverageFuelConsumption); IPK_Data.IPK_AverageFuelConsumption = (temp-offset)/factor; } //平均电耗 KWH/100km on envVar IPK_AveragePowerConsumption { int temp; //偏移量与精度值 float factor = 0.1; int offset = -99.9; temp = getValue(IPK_AveragePowerConsumption); IPK_Data.IPK_AveragePowerConsumption = (temp-offset)/factor; }
3.5 车辆状态模拟
EMS仿真实现,发动机状态更新
1 variables 2 { 3 char BCMStatusPanel[32] = "BCM状态图"; 4 char EMSCtrl[8] = "发动机"; 5 6 //本消息由EMS发出,包含引擎转速、加速踏板状态信号 7 message 0x334 EMS_EngineRPM; 8 9 msTimer EMS_timer; 10 } 11 12 on envVar PEPS_PowerMode 13 { 14 //获取电源模式 + 车速 15 varPowerMode = getValue(PEPS_PowerMode); 16 if(varPowerMode==3) 17 { 18 putValue(EMS_EngStatus, 0);//stop 19 putValue(EMS_EngineSpeedRPM,0); 20 InactiveEMS(); 21 lastPowerMode = varPowerMode; 22 } 23 else 24 { 25 if(lastPowerMode==3 && varPowerMode==0) 26 { 27 ; 28 } 29 else 30 { 31 switch(varPowerMode) 32 { 33 case 0: 34 putValue(EMS_EngStatus, 0);//stop 35 putValue(EMS_EngineSpeedRPM,0); 36 break; 37 case 1: 38 putValue(EMS_EngStatus, 0);//stop 39 putValue(EMS_EngineSpeedRPM,0); 40 break; 41 case 2: 42 putValue(EMS_EngStatus, 3); 43 break; 44 case 4: 45 putValue(EMS_EngStatus, 1);//Cranking 46 putValue(EMS_EngineSpeedRPM,0); 47 break; 48 default: 49 break; 50 } 51 ActiveEMS(); 52 } 53 } 54 } 55 56 //更新车身仿真器的状态 57 on envVar EMS_EngStatus 58 { 59 int temp; 60 temp = getValue(EMS_EngStatus); 61 EMS_EngineRPM.EMS_EngStatus = temp; 62 if(temp==3) 63 { 64 IsEngineWorking = 1; //发动机工作中 65 setPictureBoxImage(BCMStatusPanel, EMSCtrl, "..\\Panels\\picture\\启动中.bmp"); 66 } 67 else if (temp==0)//油车 68 { 69 IsEngineWorking = 0; 70 setPictureBoxImage(BCMStatusPanel, EMSCtrl, "..\\Panels\\picture\\未启动.bmp"); 71 } 72 else if(temp==2) //PHEV 73 { 74 if(@GEEA1::varCarType == 2) 75 { 76 IsEngineWorking = 0; 77 setPictureBoxImage(BCMStatusPanel, EMSCtrl, "..\\Panels\\picture\\未启动.bmp"); 78 } 79 } 80 } 81 82 //略去 EMS激活,去激活,初始值,报文发送的函数
BCM仿真器实现,四门六盖,锁状态
1 variables 2 { 3 char BCMCtrlPanel[32] = "ControlPanel"; 4 char BCMStatusPanel[32] = "BCM状态图"; 5 char BCMHoodCtrl[32]= "引擎盖"; 6 char BCMTrunkCtrl[32]= "后备箱"; 7 char BCMLFDoorCtrl[32]= "左前门"; 8 char BCMLRDoorCtrl[32]= "左后门"; 9 char BCMRFDoorCtrl[32]= "右前门"; 10 char BCMRRDoorCtrl[32]= "右后门"; 11 char BCMSunroofCtrl[32]= "天窗"; 12 char BCMLockCtrl[32]= "锁"; 13 14 //本消息由BCM发出,包含BCM控制的各类开关以及加热器继电器开关信号 15 message 0x1 BCM_StateUpdate; 16 //左门窗 17 message 0x2 BCM_LDoorWindowState; 18 //右门窗 19 message 0x3 BCM_RDoorWindowState; 20 //本消息由BCM发出,包含前车窗状态及天窗状态信号 21 message 0x4 BCM_SunroofState; 22 // 发送100ms周期的报文 23 msTimer BCM_WndsDoors_timer; 24 25 } 26 27 on start 28 { 29 InitBCMValue(); 30 InitBCMPanels(); 31 //BCM不受PEPS电源模式影响,所以启动CANoe即可发出BCM报文 32 ActiveBCM(); 33 } 34 35 on timer BCM_WndsDoors_timer 36 { 37 output(BCM_SunroofState); 38 output(BCM_StateUpdate); 39 output(BCM_LDoorWindowState); 40 output(BCM_RDoorWindowState); 41 setTimer(BCM_WndsDoors_timer, varCycTime100); 42 } 43 44 //设置每次启动CANoe时,BCM的初值 45 void InitBCMValue() 46 { 47 } 48 49 void InitBCMPanels() 50 { 51 //打开控制面板 capl function, 此处不指明路径 直接遍历工程目录 52 openPanel(BCMCtrlPanel); 53 openPanel(BCMStatusPanel); 54 } 55 56 //激活BCM往外发送报文 57 void ActiveBCM() 58 { 59 setTimer(BCM_WndsDoors_timer, varCycTime100); 60 } 61 62 //停发BCM报文 63 void InactiveBCM() 64 { 65 cancelTimer(BCM_WndsDoors_timer); 66 } 67 68 //预留一开关 停发所有报文 69 on envVar PEPS_PowerMode 70 { 71 varPowerMode = getValue(PEPS_PowerMode); 72 if(varPowerMode==3) //CAN-Sleep 73 { 74 InactiveBCM(); 75 lastPowerMode = varPowerMode; 76 } 77 else 78 { 79 if((varPowerMode==0)&&(lastPowerMode==3)) 80 { 81 ; 82 } 83 else if((2==varPowerMode) || (1==varPowerMode) || (4==varPowerMode)) 84 { 85 ActiveBCM(); //不是从3跳到0的模式,全激活 86 } 87 lastPowerMode = varPowerMode; 88 } 89 } 90 //天窗 91 on envVar BCM_SunroofAjarStatus 92 { 93 int temp; 94 95 temp = getValue(BCM_SunroofAjarStatus); 96 writeDbgLevel(1,"天窗信号=%d",temp); 97 BCM_SunroofState.L_Sunroof_Position=temp; 98 if(temp==0) //未知 99 { 100 setPictureBoxImage(BCMStatusPanel,BCMSunroofCtrl,"..\\Panels\\picture\\天窗未知.bmp"); 101 } 102 else if(temp==1) //关闭 103 { 104 setPictureBoxImage(BCMStatusPanel,BCMSunroofCtrl,"..\\Panels\\picture\\天窗关闭.bmp"); 105 } 106 else if(temp==2) //开启 107 { 108 setPictureBoxImage(BCMStatusPanel,BCMSunroofCtrl,"..\\Panels\\picture\\天窗未关闭.bmp"); 109 } 110 } 111 //驾驶位车窗 112 on envVar BCM_Drv_Wdw_PositionSts 113 { 114 int x,y; 115 116 x = getvalue(BCM_Drv_Wdw_PositionSts); 117 y = getvalue(BCM_FrontLeftDoorAjarStatus); 118 writeDbgLevel(1,"驾驶位车窗=%d",x); 119 BCM_LDoorWindowState.L_Drv_Wdw_PositionSts = x; 120 if((x==1)&&(y==0)) 121 { 122 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前窗开.bmp"); 123 } 124 else if((x==1)&&(y==1)) 125 { 126 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门和窗未关闭.bmp"); 127 } 128 else if((x==2)&&(y==0)) 129 { 130 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门关闭.bmp"); 131 } 132 else if((x==2)&&(y==1)) 133 { 134 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门未关闭.bmp"); 135 } 136 else if((x==0)&&(y==0)) 137 { 138 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前窗透气.bmp"); 139 } 140 else if((x==0)&&(y==1)) 141 { 142 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门未关闭窗透气.bmp"); 143 } 144 } 145 //左后窗 146 on envVar BCM_RLD_Wdw_PositionSts 147 { 148 int x, y; 149 x = getValue(BCM_RLD_Wdw_PositionSts); 150 y = getValue(BCM_RearLeftDoorAjarStatus); 151 writeDbgLevel(1,"左后车窗=%d",x); 152 BCM_LDoorWindowState.L_RLD_Wdw_PositionSts = x; 153 if((y==0) && (x==1)) 154 { 155 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后窗开.bmp"); 156 } 157 else if((y==1) && (x==1)) 158 { 159 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门和窗未关闭.bmp"); 160 } 161 else if((y==0)&&(x==2)) 162 { 163 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门关闭.bmp"); 164 } 165 else if((y==1)&&(x==2)) 166 { 167 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门未关闭.bmp"); 168 } 169 else if((y==0)&&(x==0)) 170 { 171 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后窗透气.bmp"); 172 } 173 else if((y==1)&&(x==0)) 174 { 175 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门未关闭窗透气.bmp"); 176 } 177 } 178 //左前门 179 on envVar BCM_FrontLeftDoorAjarStatus 180 { 181 int x, y, z; 182 x = getvalue(BCM_FrontLeftDoorAjarStatus); 183 y = getvalue(BCM_Drv_Wdw_PositionSts); 184 z = getValue(BCM_DoorLockStatusDrv); 185 BCM_LDoorWindowState.BCM_FrontLeftDoorAjarStatus = x; 186 if((x==1) && (z==1) && (varPowerMode==0)) 187 { //防盗入侵报警,熄火OFF+锁车+开左前门触发,10s后恢复armed 188 putValue(BCM_ATWS_St,4); //0x0: Armed0x1: Prearmed0x2: Disarmed0x3: Remind0x4: Alarm0x5: Partially Armed0x6: Not used0x7: Not used 189 BCM_StateUpdate.BCM_ATWS_St=getvalue(BCM_ATWS_St); 190 //setTimer(BCM_ATWS_timer, varCycTime10); 191 } 192 if((y==1)&&(x==0)) 193 { 194 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前窗开.bmp"); 195 } 196 if((y==1)&&(x==1)) 197 { 198 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门和窗未关闭.bmp"); 199 } 200 if((y==2)&&(x==0)) 201 { 202 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门关闭.bmp"); 203 } 204 if((y==2)&&(x==1)) 205 { 206 setPictureBoxImage(BCMStatusPanel, BCMLFDoorCtrl, "..\\Panels\\picture\\左前门未关闭.bmp"); 207 } 208 } 209 //左后门 210 on envVar BCM_RearLeftDoorAjarStatus 211 { 212 int x,y; 213 x = getvalue(BCM_RearLeftDoorAjarStatus); 214 y = getvalue(BCM_RLD_Wdw_PositionSts); 215 BCM_LDoorWindowState.BCM_RearLeftDoorAjarStatus=x; 216 if((x==0)&&(y==1)) 217 { 218 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后窗开.bmp"); 219 } 220 else if((x==1)&&(y==1)) 221 { 222 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门和窗未关闭.bmp"); 223 } 224 else if((x==0)&&(y==2)) 225 { 226 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门关闭.bmp"); 227 } 228 else if((x==1)&&(y==2)) 229 { 230 setPictureBoxImage(BCMStatusPanel, BCMLRDoorCtrl, "..\\Panels\\picture\\左后门未关闭.bmp"); 231 } 232 233 } 234 //驾驶侧锁 235 on envVar BCM_DoorLockStatusDrv 236 { 237 int temp; 238 temp=getValue(BCM_DoorLockStatusDrv); 239 writeDbgLevel(1,"门锁信号=%d",temp); 240 BCM_LDoorWindowState.BCM_DoorLockStatusDrv=temp; 241 if(temp==0) 242 { 243 setPictureBoxImage(BCMStatusPanel,BCMLockCtrl,"..\\Panels\\picture\\锁开.bmp"); 244 } 245 else 246 { 247 setPictureBoxImage(BCMStatusPanel,BCMLockCtrl,"..\\Panels\\picture\\锁闭.bmp"); 248 } 249 } 250 //左后门锁 251 on envVar BCM_DoorLockStatusRL 252 { 253 BCM_LDoorWindowState.BCM_DoorLockStatusRL=getValue(BCM_DoorLockStatusRL); 254 } 255 //右前窗 256 on envVar BCM_Pas_Wdw_PositionSts 257 { 258 int x,y; 259 x = getvalue(BCM_Pas_Wdw_PositionSts); 260 y = getvalue(BCM_FrontRightDoorAjarStatus); 261 writeDbgLevel(1,"副驾车窗=%d",x); 262 BCM_RDoorWindowState.L_Pas_Wdw_PositionSts=x; 263 if((y==0)&&(x==1)) 264 { 265 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前窗开.bmp"); 266 } 267 else if((y==1)&&(x==1)) 268 { 269 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门和窗未关闭.bmp"); 270 } 271 else if((y==0)&&(x==2)) 272 { 273 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门关闭.bmp"); 274 } 275 else if((y==1)&&(x==2)) 276 { 277 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门未关闭.bmp"); 278 } 279 else if((y==0)&&(x==0)) 280 { 281 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前窗透气.bmp"); 282 } 283 else if((y==1)&&(x==0)) 284 { 285 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门未关闭窗透气.bmp"); 286 } 287 } 288 //右后窗 289 on envVar BCM_RRD_Wdw_PositionSts 290 { 291 int x,y; 292 x = getvalue(BCM_RRD_Wdw_PositionSts); 293 y = getvalue(BCM_RearRightDoorAjarStatus); 294 295 writeDbgLevel(1,"右后车窗=%d",x); 296 BCM_RDoorWindowState.L_RRD_Wdw_PositionSts=x; 297 if((y==0)&&(x==1)) 298 { 299 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后窗开.bmp"); 300 } 301 if((y==1)&&(x==1)) 302 { 303 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门和窗未关闭.bmp"); 304 } 305 if((y==0)&&(x==2)) 306 { 307 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门关闭.bmp"); 308 } 309 if((y==1)&&(x==2)) 310 { 311 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门未关闭.bmp"); 312 } 313 if((y==0)&&(x==0)) 314 { 315 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后窗透气.bmp"); 316 } 317 if((y==1)&&(x==0)) 318 { 319 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门未关闭窗透气.bmp"); 320 } 321 } 322 //副驾门锁 323 on envVar BCM_DoorLockStatusPassenger 324 { 325 BCM_RDoorWindowState.BCM_DoorLockStatusPass=getValue(BCM_DoorLockStatusPassenger); 326 } 327 //右后门锁 328 on envVar BCM_DoorLockStatusRR 329 { 330 BCM_RDoorWindowState.BCM_DoorLockStatusRR=getValue(BCM_DoorLockStatusRR); 331 } 332 //右前门 333 on envVar BCM_FrontRightDoorAjarStatus 334 { 335 int x,y; 336 x = getvalue(BCM_Pas_Wdw_PositionSts);; 337 y = getvalue(BCM_FrontRightDoorAjarStatus); 338 BCM_RDoorWindowState.BCM_FrontRightDoorAjarStatus=y; 339 if((y==0)&&(x==1)) 340 { 341 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前窗开.bmp"); 342 } 343 else if((y==1)&&(x==1)) 344 { 345 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门和窗未关闭.bmp"); 346 } 347 else if((y==0)&&(x==2)) 348 { 349 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门关闭.bmp"); 350 } 351 else if((y==1)&&(x==2)) 352 { 353 setPictureBoxImage(BCMStatusPanel, BCMRFDoorCtrl, "..\\Panels\\picture\\右前门未关闭.bmp"); 354 } 355 } 356 //右后门 357 on envVar BCM_RearRightDoorAjarStatus 358 { 359 int x, y; 360 y = getvalue(BCM_RearRightDoorAjarStatus); 361 x = getvalue(BCM_RRD_Wdw_PositionSts); 362 BCM_RDoorWindowState.BCM_RearRightDoorAjarStatus=y; 363 if((y==0)&&(x==1)) 364 { 365 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后窗开.bmp"); 366 } 367 if((y==1)&&(x==1)) 368 { 369 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门和窗未关闭.bmp"); 370 } 371 if((y==0)&&(x==2)) 372 { 373 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门关闭.bmp"); 374 } 375 if((y==1)&&(x==2)) 376 { 377 setPictureBoxImage(BCMStatusPanel, BCMRRDoorCtrl, "..\\Panels\\picture\\右后门未关闭.bmp"); 378 } 379 } 380 381 //一键关门 382 on envVar CloseDoors 383 { 384 int temp; 385 temp = getValue(CloseDoors); 386 if(temp==0) //关闭 387 { 388 putValue(BCM_FrontLeftDoorAjarStatus,0); 389 putValue(BCM_FrontRightDoorAjarStatus,0); 390 putValue(BCM_RearLeftDoorAjarStatus,0); 391 putValue(BCM_RearRightDoorAjarStatus,0); 392 393 } 394 else //开启 395 { 396 putValue(BCM_FrontLeftDoorAjarStatus,1); 397 putValue(BCM_FrontRightDoorAjarStatus,1); 398 putValue(BCM_RearLeftDoorAjarStatus,1); 399 putValue(BCM_RearRightDoorAjarStatus,1); 400 } 401 } 402 //一键关窗 403 on envVar CloseWnds 404 { 405 int temp; 406 temp = getValue(CloseWnds); 407 //writeDbgLevel(1,"一键关窗=%d",temp); 408 if(temp==0) //关闭 409 { 410 putValue(BCM_Drv_Wdw_PositionSts,2); 411 putValue(BCM_Pas_Wdw_PositionSts,2); 412 putValue(BCM_RLD_Wdw_PositionSts,2); 413 putValue(BCM_RRD_Wdw_PositionSts,2); 414 415 //天窗 416 putValue(BCM_SunroofAjarStatus, 1); 417 //开度值=0 418 putValue(BCM_Val_Wdw_Opened,0); 419 } 420 else //全开 421 { 422 putValue(BCM_Drv_Wdw_PositionSts,1); 423 putValue(BCM_Pas_Wdw_PositionSts,1); 424 putValue(BCM_RLD_Wdw_PositionSts,1); 425 putValue(BCM_RRD_Wdw_PositionSts,1); 426 427 //可屏蔽天窗 428 putValue(BCM_SunroofAjarStatus, 2); 429 //开度值=100 430 putValue(BCM_Val_Wdw_Opened,100); 431 } 432 } 433 //一键锁止 434 on envVar LockDoors 435 { 436 int temp; 437 temp = getValue(LockDoors); 438 if(1==temp)//锁 439 { 440 putValue(BCM_DoorLockStatusDrv,1); 441 putValue(BCM_DoorLockStatusRL,1); 442 putValue(BCM_DoorLockStatusPassenger,1); 443 putValue(BCM_DoorLockStatusRR,1); 444 setPictureBoxImage(BCMStatusPanel,BCMLockCtrl,"..\\Panels\\picture\\锁闭.bmp"); 445 } 446 else //未锁 447 { 448 putValue(BCM_DoorLockStatusDrv,0); 449 putValue(BCM_DoorLockStatusRL,0); 450 putValue(BCM_DoorLockStatusPassenger,0); 451 putValue(BCM_DoorLockStatusRR,0); 452 setPictureBoxImage(BCMStatusPanel,BCMLockCtrl,"..\\Panels\\picture\\锁开.bmp"); 453 } 454 } 455 456 //防盗报警状态 457 on envVar BCM_ATWS_St 458 { 459 BCM_StateUpdate.BCM_ATWS_St = getValue(BCM_ATWS_St); 460 } 461 462 //BCM信号提示后盖箱/后车门开启/关闭 463 on envVar BCM_TrunkAjarStatus 464 { 465 int temp; 466 467 temp = getValue(BCM_TrunkAjarStatus); 468 BCM_StateUpdate.BCM_TrunkAjarStatus=temp; 469 if(temp==0) //关闭 470 { 471 setPictureBoxImage(BCMStatusPanel,BCMTrunkCtrl,"..\\Panels\\picture\\后备箱关闭.bmp"); 472 } 473 else{ //开启 474 setPictureBoxImage(BCMStatusPanel,BCMTrunkCtrl,"..\\Panels\\picture\\后备箱未关闭.bmp"); 475 } 476 } 477 478 //BCM信号提示引擎盖开启/关闭 479 on envVar BCM_HoodAjarStatus 480 { 481 int temp; 482 483 temp = getValue(BCM_HoodAjarStatus); 484 BCM_StateUpdate.BCM_HoodAjarStatus=temp; 485 if(temp==0) 486 { 487 setPictureBoxImage(BCMStatusPanel, BCMHoodCtrl, "..\\Panels\\picture\\引擎盖关闭.bmp"); 488 } 489 else if(temp==1) 490 { 491 setPictureBoxImage(BCMStatusPanel, BCMHoodCtrl, "..\\Panels\\picture\\引擎盖未关闭.bmp"); 492 } 493 else 494 { 495 writeDbgLevel(1, "预留值,无定义"); 496 } 497 } 498 499 on envVar BCM_Val_Wdw_Opened 500 { 501 int temp; 502 temp = getValue(BCM_Val_Wdw_Opened); 503 writeDbgLevel(1, "窗户开度值=%d", temp); 504 BCM_RDoorWindowState.L_Pas_Val_Wdw_Opened=temp; 505 BCM_RDoorWindowState.L_RRD_Val_Wdw_Opened=temp; 506 BCM_LDoorWindowState.L_Drv_Val_Wdw_Opened=temp; 507 BCM_LDoorWindowState.L_RLD_Val_Wdw_Opened=temp; 508 }
3.6 PEPS仿真+T业务主逻辑实现
T业务,处理远程业务时,需根据产品的DBC中定义的报文去解读信号,判断业务逻辑。(示例代码中处理业务逻辑的信号解析规则属于随便举例,实际应用时根据DBC定义进行解读)
1 variables 2 { 3 char log[128]; 4 float tFactor = 100000.0; //时间精度值 5 //本消息由PEPS发出, 鉴权 6 message 0x5 PEPS_TELChallengeCode; 7 //本消息由GW发送,包括PEPS的电源模式及报警信号等 8 message 0x6 GW_Info; 9 //由TBOX反馈的应答码 10 message 0x7 TBOX_ResponseCode; 11 12 msTimer GW_PEPS_Timer; 13 //远程控制的PEPS响应定时器 14 msTimer GW_PEPS_TimerRespSuccess; 15 //接收到报文的定时器 16 msTimer GW_PEPS_TimerRespReceived; 17 //PEPS启动认证码的定时器,只发三帧 18 msTimer GW_PEPS_TimerSendChallengeCode; 19 //远程启动定时器 20 timer RespRmtEngineWorkingTimer; 21 22 //PM 净化定时器 23 timer RmtAirCleanTimer; 24 //加热定时器 25 timer RmtDrvHeatTimer; 26 timer RmtPasHeatTimer; 27 //空调允许时间 28 timer RmtACOnTimer; 29 // 30 timer UpdateStatusTimer; 31 32 //以下内容属于PEPS加密算法的内容 33 const dword SC32 = 0x00112233; 34 const qword CC64 = 0x94254547464A5B7DLL; //后最LL 35 //SK128 无法获取; RN32 每次鉴权随机生成; 36 dword RN32; 37 //设别远程启动的类型;在发生鉴权行为的时候会使用到 38 //1=启动;2=熄火;3=使能;4=禁止;0 预留 39 int rmtReqTpye=0; 40 //是否已认真过 41 int IsAuthed = 0; 42 43 44 //远程控制请求 45 byte rmtCtrlReq; 46 // 远程查询PM2.5 47 byte rmtReqPM; 48 //远程查询 49 byte rmtReqQ; 50 //远程启动 51 byte rmtStartReq; 52 byte rmtStopReq; 53 //远程加热座椅 54 byte rmtHeatDrvSeat; 55 byte rmtHeatPasSeat; 56 57 //远程开关空调 58 byte rmtACReq; //byte(3) 温度值+空调的启停状态 59 byte acReq; 60 byte acTemp; 61 62 //远程空气净化 63 byte rmtAirCleanerReq; 64 65 //发动机运行时长 分级 66 byte rmtEngWorkTimeLvl = 0; 67 int rmtEngWorkTime = 0; //远程发动机启动时长, 单位s 68 //延时 69 byte rmtEngWorkDelayTimeLvl = 0; 70 //远程运行时间 71 int rmtWorkTime = 0; //包含启动空调,加热,绿净的时长 72 int tempWorkTime; //临时变量 存放rmtworkTime 73 //远程禁允发动机 74 byte rmtForbidEngReq; 75 byte rmtPermitEngReq; 76 77 //记忆PEPS应答报文的发送次数 78 int pepsRespCnt=0; 79 //记忆PEPS认证报文的发送次数 80 int pepsAuthCnt=0; 81 // 82 int pepsRecvCnt=0; 83 } 84 85 on start 86 { 87 InitLogging(); 88 InitPEPSValue(); 89 ActivePEPS(); 90 91 } 92 93 //关闭CANoe时 停止记录LOG 94 on stopMeasurement 95 { 96 writeDestroy(mTrace); 97 } 98 99 //标记当前电源模式, 3=休眠开关, KL15电源通断可使用VT板卡实现,否则手动操作实现为半自动化方案 100 on envVar PEPS_PowerMode 101 { 102 varPowerMode = getValue(PEPS_PowerMode); 103 //刷新报文值 104 GW_Info.PEPS_PowerMode = varPowerMode; 105 if(varPowerMode==3) 106 { 107 InactivePEPS(); 108 lastPowerMode = varPowerMode; 109 } 110 else 111 { 112 if((varPowerMode==0)&&(lastPowerMode==3)) 113 { 114 ; 115 } 116 else if((2==varPowerMode) || (1==varPowerMode) || (4==varPowerMode)) 117 { 118 ActivePEPS(); //不是从3跳到0的模式,全激活 119 } 120 lastPowerMode = varPowerMode; 121 } 122 } 123 124 125 //标记PEPS应答的错误码 126 on envVar PEPS_FailReason2TBOX 127 { 128 int temp; 129 temp = getValue(PEPS_FailReason2TBOX); 130 writeDbgLevel(1,"PEPS_FailReason2TBOX=0x%x",temp); 131 GW_Info.PEPS_FailReason2TBOX = temp; 132 } 133 //标记PEPS应答的成功与否 134 on envVar PEPS_StatusResponse2TBOX 135 { 136 GW_Info.PEPS_StatusResponse2TBOX = getValue(PEPS_StatusResponse2TBOX); 137 } 138 //标记发动机的启动模式 139 on envVar PEPS_RemoteControlSt 140 { 141 GW_Info.PEPS_RemoteControlSt=getValue(PEPS_RemoteControlSt); 142 } 143 144 /*********************************************************** 145 * description : TBOX响应T业务的请求的报文 146 * parameter : None 147 * creation date: 2018/10/17 148 * author : xxx 149 * revision date: 150 * revision log : 151 * modifier : 152 ***********************************************************/ 153 on message TBOX_RmtCtrlInfo //此消息由DBC中定义的远程控制报文可获取, 具体的报文解析,字节信号位等由DBC定义 154 { 155 rmtReqQ = (this.byte(1) & 0x03); 156 //远程控制 + 查询类 157 rmtCtrlReq = this.TBOX_DoorsLock; 158 rmtReqPM = this.TBOX_PM25; 159 160 //远程发动机延时等级 161 rmtEngWorkDelayTimeLvl = this.TBOX_EngineDelayTime; 162 rmtStartReq = this.TBOX_EngineStartReq; 163 rmtStopReq = this.TBOX_EngineStopReq; 164 rmtACReq = this.byte(3); 165 rmtAirCleanerReq = this.TBOX_AirCleanerReq; 166 rmtForbidEngReq = this.TBOX_EngineForbidReq; 167 rmtPermitEngReq = this.TBOX_EnginePermitReq; 168 //PEPSRespReceived(); //只要一接到接收指令 立即回复处理中 169 //远程控制 170 RespRmtCtrlCmd(rmtCtrlReq); 171 if(0 != rmtEngWorkDelayTimeLvl) //如果不等于0, 有控制请求 172 { 173 PEPSRespReceived(); 174 switch(rmtEngWorkDelayTimeLvl) 175 { 176 case 0x1://1min 177 rmtWorkTime = 60; 178 break; 179 case 0x2://3min 180 rmtWorkTime = 180; 181 break; 182 case 0x3://5min 183 rmtWorkTime = 300; 184 break; 185 case 0x4://10min 186 rmtWorkTime = 600; 187 break; 188 default: 189 break; 190 } 191 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,发动机运行时间延长%d", timeNow()/tFactor, rmtWorkTime); 192 writeLineEx(mTrace, INFO, log); 193 PEPSRespSuccess(); 194 } 195 //远程查询 196 if(1 == rmtReqPM) 197 { 198 PEPSRespReceived(); 199 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,PM2.5查询", timeNow()/tFactor); 200 writeLineEx(mTrace, INFO, log); 201 putValue(AC_PM25Sts, 2);//complate 202 PEPSRespSuccess(); 203 } 204 if(3 == rmtReqQ) 205 { 206 PEPSRespReceived(); 207 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,查询天窗车窗", timeNow()/tFactor); 208 writeLineEx(mTrace, INFO, log); 209 PEPSRespSuccess(); 210 } 211 //远程启动 212 if(1 == rmtStartReq) 213 { 214 PEPSRespReceived(); 215 rmtReqTpye = 1; 216 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,启动发动机", timeNow()/tFactor); 217 writeLineEx(mTrace, INFO, log); 218 rmtEngWorkTimeLvl = this.TBOX_EngineStartTime; 219 switch(rmtEngWorkTimeLvl) 220 { 221 case 0x1://1min 222 rmtEngWorkTime = 60; 223 break; 224 case 0x2://3min 225 rmtEngWorkTime = 180; 226 break; 227 case 0x3://5min 228 rmtEngWorkTime = 300; 229 break; 230 case 0x4://10min 231 rmtEngWorkTime = 600; 232 break; 233 default: 234 break; 235 } 236 snprintf(log, elcount(log),"%f <- TBOX, 启动发动机时长%d", timeNow()/tFactor, rmtEngWorkTime); 237 writeLineEx(mTrace, INFO, log); 238 PEPSReqAuth(); 239 } 240 241 //远程停止 242 if(rmtStopReq==1) 243 { 244 rmtReqTpye = 2; 245 PEPSRespReceived(); 246 247 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,停止发动机", timeNow()/tFactor); 248 writeLineEx(mTrace, INFO, log); 249 250 PEPSRespSuccess(); 251 RespRmtStop(); 252 } 253 //远程禁止发动机 254 if(1 == rmtForbidEngReq) 255 { 256 rmtReqTpye = 4; 257 PEPSRespReceived(); 258 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,禁止启动", timeNow()/tFactor); 259 writeLineEx(mTrace, INFO, log); 260 261 PEPSReqAuth(); 262 } 263 //远程使能发动机 264 if(1 == rmtPermitEngReq) 265 { 266 rmtReqTpye = 3; 267 PEPSRespReceived(); 268 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,允许启动", timeNow()/tFactor); 269 writeLineEx(mTrace, INFO, log); 270 271 PEPSReqAuth(); 272 } 273 //PM 净化 274 if(2==rmtAirCleanerReq) //2=ON , 1=OFF, 0=No Req 275 { 276 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,空气净化开启", timeNow()/tFactor); 277 writeLineEx(mTrace, INFO, log); 278 279 PEPSRespReceived(); 280 PEPSRespSuccess(); 281 RespRmtOpenAirClean(); //区分 282 } 283 else if(1==rmtAirCleanerReq) 284 { 285 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令,空气净化关闭", timeNow()/tFactor); 286 writeLineEx(mTrace, INFO, log); 287 288 PEPSRespReceived(); 289 PEPSRespSuccess(); 290 RespRmtCloseAirClean(); 291 } 292 293 //远程空调 294 if(0x1F != rmtACReq) //2=ON , 1=OFF, 0=No Req 295 { 296 PEPSRespReceived(); 297 acReq = ((rmtACReq >> 6) & 0x3); 298 acTemp = (rmtACReq & 0x1F); 299 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令, 操作空调req=%d, temp=%d", timeNow()/tFactor,acReq,acTemp); 300 writeLineEx(mTrace, INFO, log); 301 302 PEPSRespSuccess(); 303 if(2==acReq) 304 { 305 RespRmtOpenAC(); //open 306 } 307 else if(1==acReq) 308 { 309 RespRmtCloseAC(); //close 310 } 311 } 312 if(this.byte(4)!=0xE7) 313 { 314 rmtHeatDrvSeat = this.TBOX_DrvHeatReq; 315 rmtHeatPasSeat = this.TBOX_PassHeatReq; 316 317 snprintf(log, elcount(log),"%f <- TBOX, 接收到指令, 座椅加热Drv=%d,Pas=%d", timeNow()/tFactor,rmtHeatDrvSeat, rmtHeatPasSeat); 318 writeLineEx(mTrace, INFO, log); 319 320 PEPSRespReceived(); 321 PEPSRespSuccess(); 322 //主驾 323 switch(rmtHeatDrvSeat) 324 { 325 case 0x0: 326 RespRmtCloseDrvHeat(); 327 break; 328 case 0x1: 329 RespRmtOpenDrvHeat(rmtHeatDrvSeat); 330 break; 331 case 0x2: 332 RespRmtOpenDrvHeat(rmtHeatDrvSeat); 333 break; 334 default: 335 break; 336 } 337 338 //副驾 339 switch(rmtHeatPasSeat) 340 { 341 case 0x0: 342 RespRmtClosePasHeat(); 343 break; 344 case 0x1: 345 RespRmtOpenPasHeat(rmtHeatPasSeat); 346 break; 347 case 0x2: 348 RespRmtOpenPasHeat(rmtHeatPasSeat); 349 break; 350 default: 351 break; 352 } 353 } 354 } 355 356 //TBOX响应PEPS挑战码,发出的认证码 357 on message TBOX_ResponseCode 358 { 359 snprintf(log, elcount(log),"%f <- TBOX, response peps auth request", timeNow()/tFactor); 360 writeLineEx(mTrace, INFO, log); 361 //PEPS回复控制成功通过 362 PEPSRespSuccess(); 363 if(rmtReqTpye == 1){ 364 RespRmtStart(); 365 //设置发动机的运行模式与运行时长,启动定时器 366 snprintf(log, elcount(log),"%f <- TBOX, engine work time=%d", timeNow()/tFactor, rmtEngWorkTime); 367 writeLineEx(mTrace, INFO, log); 368 setTimer(RespRmtEngineWorkingTimer, rmtEngWorkTime); 369 } 370 else if(rmtReqTpye == 2) //实测关闭发动机不需要鉴权 371 { 372 RespRmtStop(); 373 } 374 else if(3 == rmtReqTpye) //使能 375 { 376 RespRmtPermit(); 377 } 378 else if(4 == rmtReqTpye) //禁止 379 { 380 RespRmtForbidden(); 381 } 382 } 383 384 //远程启动发动机运行时长定时器 385 on timer RespRmtEngineWorkingTimer 386 { 387 //发动机置位远程启动模式 388 putValue(PEPS_RemoteControlSt,0); 389 //电源置为ON 390 putValue(PEPS_PowerMode, 0); 391 //发动机置位running 392 putValue(EMS_EngStatus,0); 393 } 394 395 //空调开启一段时间后 更新温度传感器信号 396 on timer UpdateStatusTimer 397 { 398 ; //未实现 399 } 400 401 //空调运行时长定时器 402 on timer RmtACOnTimer 403 { 404 putValue(AC_OnState, 0); 405 } 406 407 //空气净化运行时长定时器 408 on timer RmtAirCleanTimer 409 { 410 putValue(AC_AirCleanState, 0); 411 putValue(AC_OnState,0); 412 } 413 414 //主驾加热运行时长定时器 415 on timer RmtDrvHeatTimer 416 { 417 putValue(HVSM_DrvHeatSts, 0); 418 } 419 420 //副驾加热运行时长定时器 421 on timer RmtPasHeatTimer 422 { 423 putValue(HVSM_PassHeatSts,0); 424 } 425 426 //响应远程加热主驾座椅 427 void RespRmtOpenDrvHeat(int level) 428 { 429 putValue(HVSM_DrvHeatSts,level); 430 if((1==IsEngineWorking) && (rmtWorkTime!=0)) 431 { 432 snprintf(log, elcount(log),"%f -> HVSM, 先启动发动机,再开启座椅加热,延长发动机运行时长%d", timeNow()/tFactor, rmtWorkTime); 433 writeLineEx(mTrace, INFO, log); 434 tempWorkTime = rmtWorkTime; 435 cancelTimer(RespRmtEngineWorkingTimer); //取消原定时器 436 setTimer(RespRmtEngineWorkingTimer, tempWorkTime); //重置发动机定时器 437 setTimer(RmtDrvHeatTimer, tempWorkTime); 438 rmtWorkTime=0; 439 } 440 else 441 { 442 snprintf(log, elcount(log),"%f -> HVSM, 直接座椅加热,发动机运行时长%d", timeNow()/tFactor, rmtEngWorkTime); 443 writeLineEx(mTrace, INFO, log); 444 setTimer(RmtDrvHeatTimer, rmtEngWorkTime); 445 } 446 } 447 448 //响应远程加热副驾座椅 449 void RespRmtOpenPasHeat(int level) 450 { 451 putValue(HVSM_PassHeatSts,level); 452 if((1==IsEngineWorking) && (rmtWorkTime!=0)) 453 { 454 snprintf(log, elcount(log),"%f -> HVSM, 先启动发动机,再加热座椅,延长发动机运行时长%d", timeNow()/tFactor, rmtWorkTime); 455 writeLineEx(mTrace, INFO, log); 456 tempWorkTime = rmtWorkTime; 457 cancelTimer(RespRmtEngineWorkingTimer); //取消原定时器 458 setTimer(RespRmtEngineWorkingTimer, tempWorkTime); //重置发动机定时器 459 setTimer(RmtPasHeatTimer, tempWorkTime); 460 rmtWorkTime=0; //用完后归零 461 } 462 else 463 { 464 snprintf(log, elcount(log),"%f -> HVSM, 直接加热座椅,发动机运行时长%d", timeNow()/tFactor, rmtEngWorkTime); 465 writeLineEx(mTrace, INFO, log); 466 setTimer(RmtPasHeatTimer, rmtEngWorkTime); 467 } 468 } 469 470 //响应关闭座椅加热 471 void RespRmtCloseDrvHeat() 472 { 473 cancelTimer(RmtDrvHeatTimer); 474 putValue(HVSM_DrvHeatSts, 0); 475 } 476 477 //响应关闭座椅加热 478 void RespRmtClosePasHeat() 479 { 480 cancelTimer(RmtPasHeatTimer); 481 putValue(HVSM_PassHeatSts, 0); 482 } 483 484 //响应开启空调 485 void RespRmtOpenAC() 486 { 487 putValue(AC_OnState, 1); 488 if((1==IsEngineWorking) && (rmtWorkTime!=0)) 489 { 490 //先启动发动机 后启动空调 491 snprintf(log, elcount(log),"%f -> AC, 先启动发动机,再开启空调,延长发动机运行时长%d", timeNow()/tFactor, rmtWorkTime); 492 writeLineEx(mTrace, INFO, log); 493 tempWorkTime = rmtWorkTime; 494 cancelTimer(RespRmtEngineWorkingTimer); //取消原定时器 495 setTimer(RespRmtEngineWorkingTimer, tempWorkTime); //重置发动机定时器 496 setTimer(RmtACOnTimer, tempWorkTime); 497 rmtWorkTime=0; //用完后归零 498 } 499 else 500 { 501 //直接启动空调 502 snprintf(log, elcount(log),"%f -> AC, 直接启动空调,发动机运行时长%d", timeNow()/tFactor, rmtEngWorkTime); 503 writeLineEx(mTrace, INFO, log); 504 setTimer(RmtACOnTimer, rmtEngWorkTime); 505 } 506 } 507 508 //响应关闭空调 509 void RespRmtCloseAC() 510 { 511 cancelTimer(RmtACOnTimer); 512 putValue(AC_OnState, 0); 513 } 514 515 //响应关闭空气净化 516 void RespRmtCloseAirClean() 517 { 518 cancelTimer(RmtAirCleanTimer); 519 putValue(AC_AirCleanState, 0); 520 putValue(AC_OnState, 0); 521 522 } 523 524 //响应开启PM净化 525 void RespRmtOpenAirClean() 526 { 527 putValue(AC_OnState, 1); 528 putValue(AC_AirCleanState, 1); 529 if((1==IsEngineWorking) && (rmtWorkTime!=0)) 530 { 531 //先启动发动机 后启动PM净化 532 snprintf(log, elcount(log),"%f -> AC, 先启动发动机 再开空气净化,延长发动机运行时间%d", timeNow()/tFactor, rmtWorkTime); 533 writeLineEx(mTrace, INFO, log); 534 tempWorkTime = rmtWorkTime; 535 cancelTimer(RespRmtEngineWorkingTimer); //取消原定时器 536 setTimer(RespRmtEngineWorkingTimer, rmtWorkTime); //重置发动机定时器 537 setTimer(RmtAirCleanTimer, rmtWorkTime); //置位空气净化定时器 538 rmtWorkTime = 0; 539 } 540 else 541 { 542 //直接启动PM净化 543 snprintf(log, elcount(log),"%f -> AC, 直接开启空气净化,发动机运行时间%d", timeNow()/tFactor, rmtEngWorkTime); 544 writeLineEx(mTrace, INFO, log); 545 setTimer(RmtAirCleanTimer, rmtEngWorkTime); //置位空气净化定时器 546 } 547 548 } 549 550 //响应远程控制指令 551 void RespRmtCtrlCmd(int cmd) 552 { 553 //判断远程控制类逻辑 554 switch(cmd){ 555 case 0x0://No command 556 break; 557 case 0x1://All door lock 558 snprintf(log, elcount(log),"%f <- TBOX, 接收上锁指令", timeNow()/tFactor); 559 writeLineEx(mTrace, INFO, log); 560 SetDoorsLocked(); 561 PEPSRespSuccess(); 562 break; 563 case 0x2://Blink lamp 闪灯 564 break; //APP未实现单独指令 565 case 0x3://All door unlock 566 snprintf(log, elcount(log),"%f <- TBOX, 接收解锁指令", timeNow()/tFactor); 567 writeLineEx(mTrace, INFO, log); 568 SetDoorsUnlocked(); 569 PEPSRespSuccess(); 570 break; 571 case 0x4://Whistle 鸣笛 572 break; //APP未实现单独指令 573 case 0x5://Global closing-window up 574 snprintf(log, elcount(log),"%f <- TBOX, 接收关窗指令", timeNow()/tFactor); 575 writeLineEx(mTrace, INFO, log); 576 SetWndsClosed(); 577 PEPSRespSuccess(); 578 break; 579 case 0x6://Closing window 580 break; //APP未实现单独指令 581 case 0x7: //Closing sunroof 582 break; //APP未实现单独指令 583 case 0x8://Global opening-window down 584 snprintf(log, elcount(log),"%f <- TBOX, 接收开窗指令", timeNow()/tFactor); 585 writeLineEx(mTrace, INFO, log); 586 SetWndsOpened(); 587 PEPSRespSuccess(); 588 break; 589 case 0x9://Vehicle search 590 snprintf(log, elcount(log),"%f <- TBOX, 接收寻车指令", timeNow()/tFactor); 591 writeLineEx(mTrace, INFO, log); 592 PEPSRespSuccess(); 593 break; 594 case 0xA://Trunk unlock 595 snprintf(log, elcount(log),"%f <- TBOX, 接收开启后备箱指令", timeNow()/tFactor); 596 writeLineEx(mTrace, INFO, log); 597 SetTrunkOpened(); 598 PEPSRespSuccess(); 599 break; 600 case 0xB://Window ventilate 601 snprintf(log, elcount(log),"%f <- TBOX, 接收透气指令", timeNow()/tFactor); 602 writeLineEx(mTrace, INFO, log); 603 SetWndsVentilate(); 604 PEPSRespSuccess(); 605 break; 606 case 0xC://Opening sunroof 607 break; //APP未实现单独指令 608 default://others are reserved 609 break; //预留指令 610 } 611 } 612 613 //远程禁止启动发动机 614 void RespRmtForbidden() 615 { 616 GW_Info.PEPS_EngineforbidSt=1; 617 } 618 619 //远程允许启动发动机 620 void RespRmtPermit() 621 { 622 GW_Info.PEPS_EngineforbidSt=0; 623 } 624 625 626 //远程停止发动机 627 void RespRmtStop() 628 { 629 cancelTimer(RespRmtEngineWorkingTimer); 630 631 putValue(PEPS_RemoteControlSt,0); 632 putValue(EMS_EngStatus, 0); 633 putValue(PEPS_PowerMode, 0); 634 //停止发动机后 所有控制器开的状态都归零 635 putValue(AC_AirCleanState, 0); 636 putValue(AC_OnState,0); 637 putValue(HVSM_DrvHeatSts, 0); 638 putValue(HVSM_PassHeatSts, 0); 639 } 640 641 //响应远程启动 642 void RespRmtStart() 643 { 644 IsAuthed =0; 645 putValue(EMS_EngStatus, 0); 646 647 //发动机置位远程启动模式 648 putValue(PEPS_RemoteControlSt,1); 649 //发动机置位running 650 putValue(EMS_EngStatus, 3); 651 //电源置为ON 652 putValue(PEPS_PowerMode, 2); 653 IsEngineWorking = 1; //标记发动机已经工作中, Delay时间不会发出 654 snprintf(log, elcount(log),"%f <- EMS PEPS, Engine running, Power on", timeNow()/tFactor); 655 writeLineEx(mTrace, INFO, log); 656 //TestWaitForTimeout(3000);//延时函数在纯CAPL程序中不能使用 657 } 658 659 //初始化电源模式 660 void InitPEPSValue() 661 { 662 putValue(PEPS_PowerMode, 0); 663 putValue(PEPS_StatusResponse2TBOX,0); 664 putValue(PEPS_FailReason2TBOX,0); 665 putValue(PEPS_RemoteControlSt,0); 666 GW_Info.PEPS_PowerModeValidity = 2; 667 GW_Info.PEPS_EngineforbidSt=0; //发动机允许远程使能状态 668 } 669 670 void ActivePEPS() 671 { 672 setTImer(GW_PEPS_Timer, varCycTime100); 673 } 674 675 void InactivePEPS() 676 { 677 cancelTimer(GW_PEPS_Timer); 678 } 679 680 //每次鉴权生成随机认证码 681 void GenerateRN32() 682 { 683 RN32 = random(0xFFFFFFFF); 684 } 685 686 //窗户透气响应 687 void SetWndsVentilate() 688 { 689 //窗户开 690 putValue(BCM_Drv_Wdw_PositionSts,0); 691 putValue(BCM_RLD_Wdw_PositionSts,0); 692 putValue(BCM_Pas_Wdw_PositionSts,0); 693 putValue(BCM_RRD_Wdw_PositionSts,0); 694 putValue(BCM_Val_Wdw_Opened, 20); //开度值20% 695 } 696 697 //响应远程关闭车窗指令 698 void SetWndsClosed() 699 { 700 // putValue(CloseWnds,0); 701 putValue(BCM_Drv_Wdw_PositionSts,2); 702 putValue(BCM_RLD_Wdw_PositionSts,2); 703 putValue(BCM_Pas_Wdw_PositionSts,2); 704 putValue(BCM_RRD_Wdw_PositionSts,2); 705 putValue(BCM_Val_Wdw_Opened, 0); 706 } 707 708 //响应远程上锁指令 709 void SetDoorsLocked() 710 { 711 putValue(LockDoors,1); 712 } 713 714 //响应远程解锁指令 715 void SetDoorsUnlocked() 716 { 717 putValue(LockDoors,0); 718 } 719 720 //响应远程开窗指令 721 void SetWndsOpened() 722 { 723 // putValue(CloseWnds,1);//开启 724 putValue(BCM_Drv_Wdw_PositionSts,1); 725 putValue(BCM_RLD_Wdw_PositionSts,1); 726 putValue(BCM_Pas_Wdw_PositionSts,1); 727 putValue(BCM_RRD_Wdw_PositionSts,1); 728 putValue(BCM_Val_Wdw_Opened, 100); 729 } 730 731 //响应远程打开后备箱 732 void SetTrunkOpened() 733 { 734 putValue(BCM_TrunkAjarStatus, 1); //开启后备箱 735 } 736 737 //PEPS回复控制成功报文 738 void PEPSRespSuccess() 739 { 740 setTimer(GW_PEPS_TimerRespSuccess, varCycTime100); 741 } 742 743 void PEPSRespReceived() 744 { 745 // setTimer(GW_PEPS_TimerRespReceived, varCycTime20); 746 } 747 748 //PEPS发起认证请求 749 void PEPSReqAuth() 750 { 751 //算法不实现! 752 //若实际环境中接入了PEPS设备,则需实车抓取报文使用固定一组报文访问 753 //安全隐患,PEPS入侵(可能设计:每次随机的挑战码,携带当前时间,设置计数器和校验位验证有效性,限定时间内的重复报文无效) 754 if(rmtReqTpye ==1) 755 { 756 GenerateChallengeCode4Start(); 757 } 758 else if(rmtReqTpye ==2) 759 { 760 GenerateChallengeCode4Stop(); 761 } 762 763 setTimer(GW_PEPS_TimerSendChallengeCode, varCycTime20); 764 IsAuthed = 1; //已经发起过鉴权 765 } 766 767 void GenerateChallengeCode4Stop() 768 { 769 //关闭发动机鉴权 770 } 771 //生成PEPS挑战码,启动发动机鉴权 772 void GenerateChallengeCode4Start() 773 { 774 if(pepsAuthCnt==0) 775 { 776 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte0 = random(0xff); 777 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte1 = random(0xff); 778 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte2 = random(0xff); 779 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte3 = random(0xff); 780 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte4 = random(0xff); 781 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte5 = random(0xff); 782 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte6 = random(0xff); 783 PEPS_TELChallengeCode.PEPS_TELchallengeCode_Byte7 = random(0xff); 784 } 798 } 799 800 //TBOX预约充电请求(电动车)/ 801 on message TBOX_ReservationChgSet 802 { 803 //线束不支持双路CAN 暂且无法实现 804 } 805 806 //TBOX被唤醒的原因指示 807 on message NWM_TBOX_Information 808 { 809 int reasons; 810 reasons = this.TBOX_Wakeup_reasons; 811 switch(reasons){ 812 case 0x2: 813 writeLineEx(mTrace, 1, "NM PDU Received"); 814 break; 815 case 0x5: 816 writeLineEx(mTrace, 1, "KL15 On"); 817 break; 818 case 0x06: 819 writeLineEx(mTrace, 1, "Telematics service"); 820 break; 821 default: 822 break; 823 } 824 } 825 826 //PEPS周期报文发送 827 on timer GW_PEPS_Timer 828 { 829 output(GW_Info); 830 setTimer(GW_PEPS_Timer, varCycTime100); 831 } 832 833 //响应远程请求,PEPS反馈Received 834 on timer GW_PEPS_TimerRespReceived 835 { 836 pepsRecvCnt+=1; 837 if(pepsRecvCnt<2) 838 { 839 snprintf(log, elcount(log),"%f -> PEPS, response 'in progress'", timeNow()/tFactor); 840 writeLineEx(mTrace, INFO, log); 841 putValue(PEPS_FailReason2TBOX, 0); 842 putValue(PEPS_StatusResponse2TBOX, 1); 843 setTimer(GW_PEPS_TimerRespReceived, varCycTime20); //200ms一帧 844 } 845 else 846 { 847 cancelTimer(GW_PEPS_TimerRespReceived); 848 putValue(PEPS_FailReason2TBOX, 0); 849 putValue(PEPS_StatusResponse2TBOX, 0); 850 pepsRecvCnt = 0; 851 } 852 } 853 854 //响应远程请求,PEPS反馈Success 855 on timer GW_PEPS_TimerRespSuccess 856 { 857 pepsRespCnt+=1; 858 if(pepsRespCnt<2) 859 { 860 snprintf(log, elcount(log),"%f -> PEPS, response 'success'", timeNow()/tFactor); 861 writeLineEx(mTrace, INFO, log); 862 putValue(PEPS_FailReason2TBOX, 0); 863 putValue(PEPS_StatusResponse2TBOX, 2); 864 setTimer(GW_PEPS_TimerRespSuccess, varCycTime100); 865 } 866 else 867 { 868 cancelTimer(GW_PEPS_TimerRespSuccess); 869 putValue(PEPS_FailReason2TBOX, 0); 870 putValue(PEPS_StatusResponse2TBOX, 0); 871 pepsRespCnt = 0; 872 } 873 } 874 875 //响应远程启动请求, PEPS发出挑战码 876 on timer GW_PEPS_TimerSendChallengeCode 877 { 878 879 pepsAuthCnt+=1; 880 if(pepsAuthCnt<2) 881 { 882 snprintf(log, elcount(log),"%f -> PEPS, send challenge code", timeNow()/tFactor); 883 writeLineEx(mTrace, INFO, log); 884 885 output(PEPS_TELChallengeCode); 886 setTimer(GW_PEPS_TimerSendChallengeCode, varCycTime20);//递归 发三帧,20ms一帧 887 } 888 else 889 { 890 cancelTimer(GW_PEPS_TimerSendChallengeCode); 891 pepsAuthCnt = 0; 892 } 893 }
4. 总结
整个车辆网功能中涉及到整车中其它ECU相关的业务,也可参照以上实现逻辑去进行仿真。此处不一一举例。
我在台架中接入真实仪表验证我的仿真逻辑(节点支持热增减,没有ECU则使用仿真节点,有真实ECU则屏蔽)。
启动仿真程序后,操作控制器,验证车身仿真器的实现,可以检验出仿真代码实现的正确性

