
FOTA-车端自动化测试方案设计(2)
接上篇,Capl编程详细实现,软件环境CANoe 11.0
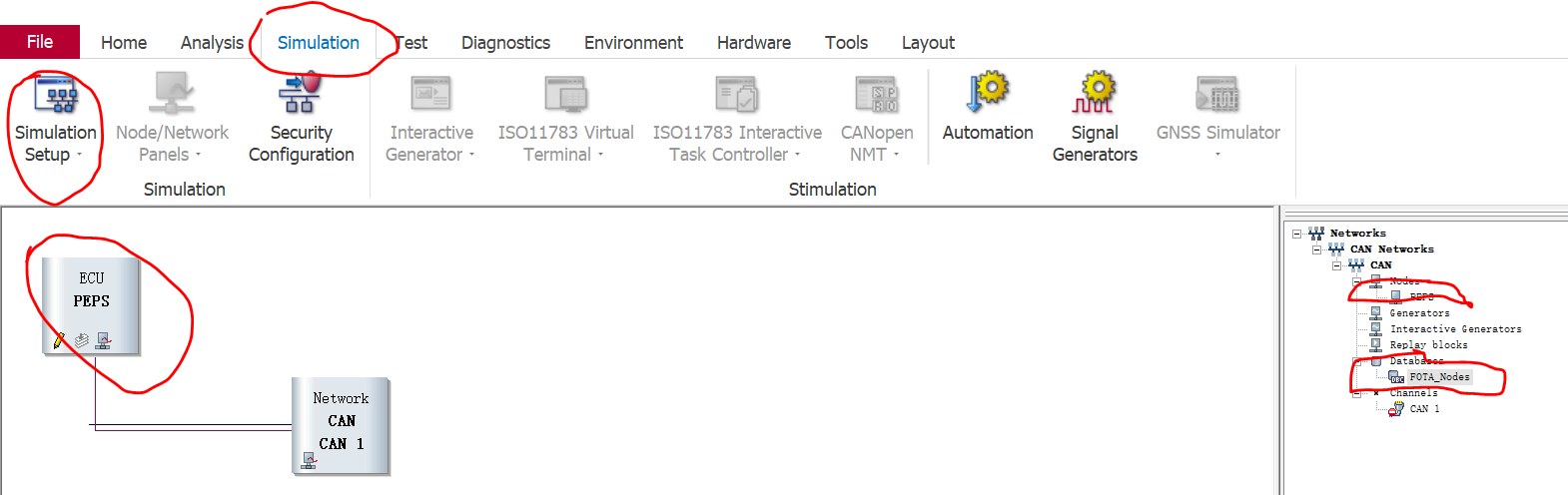
1)Simulation Setup
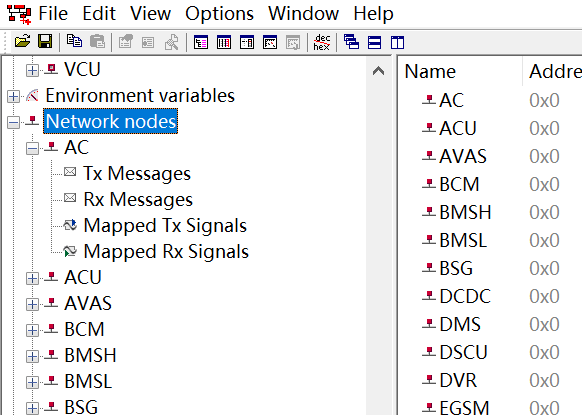
首先创建一个.DBC文件,然后新建待仿真的空节点,如下图,只有节点名称无任何信号。然后加载到Setup
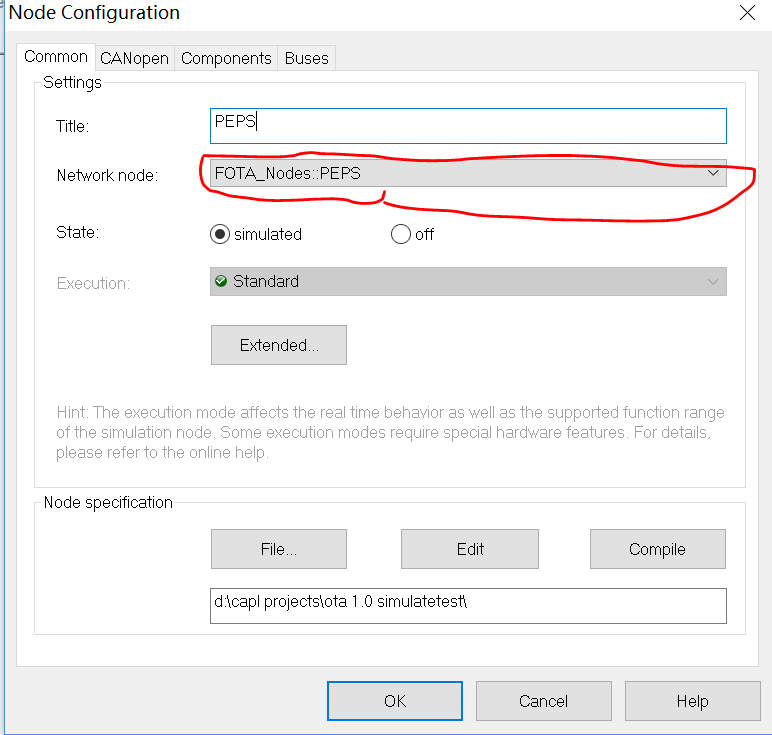
插入新节点,选择Insert Network Node, 然后右击新建的节点配置该节点属性。
选择DBC中创建的对应节点名(此处很有用)
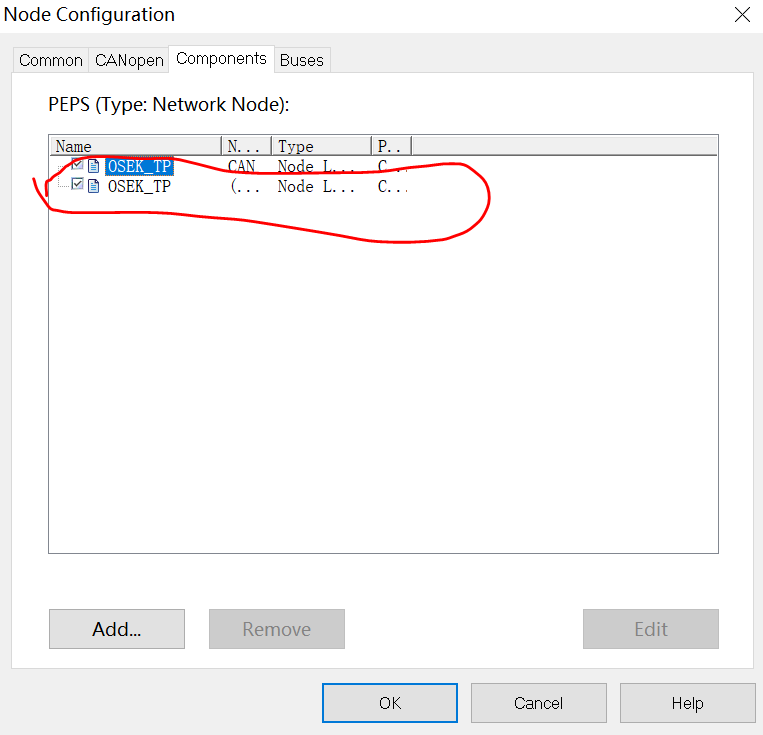
设置节点属性为OSEK_TP节点(添加osek_tp.dll即可,在canoe安装目录下查找,通常是 "C:\Program Files\Vector CANoe 11.0\Exec32")
创建完成的Simulation Setup如下图: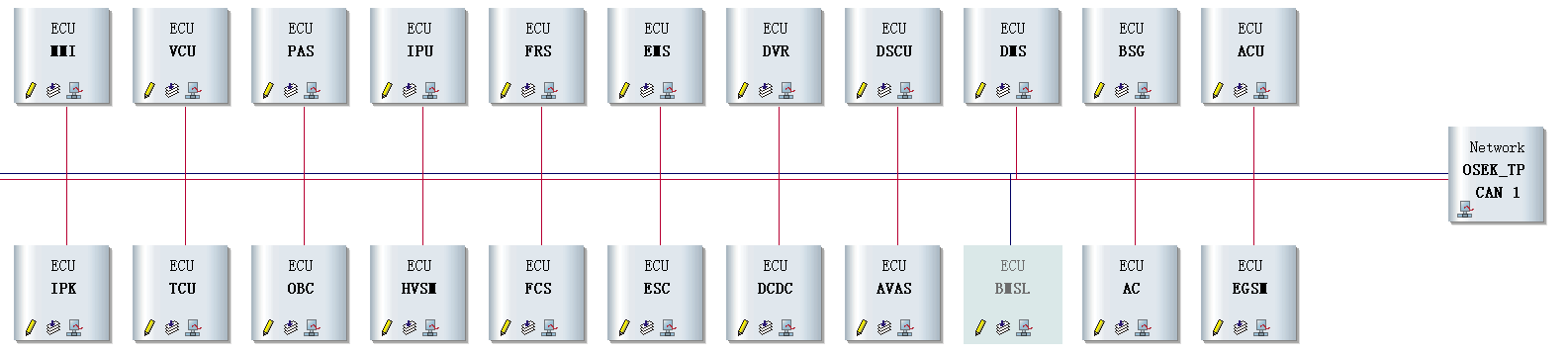
2)代码部分
此处选择GW(网关)节点作为样例讲解。其中涉及的环境变量和系统变量在代码中出现时再做说明
a. 实现ECU应用层行为仿真


1 /*@!Encoding:936*/
2 includes
3 {
4 #include "GenericNode.cin" //此处是一个造好的轮子,可见canoe提供的\OSEK_TP_MultiChannel Demo
5 }
6
7 variables
8 {
9 msTimer PhysRespTimer; //物理寻址应答定时器
10 msTimer FuncRespTimer; //功能寻址应答定时器
11 msTimer GWMessageTimer; //ECU外发消息定时器,周期性的往总线发报文
12 message 0x111 GW_message; //此处是随便举例的报文,假设GW的tx报文就是id=0x111
13 message 0x222 NWM_message; //监控唤醒状态
14 const int cycPepsTime = 100; //100ms周期
15 }
16
17 //每100ms发送一帧gw报文到总线,ecu信号仿真
18 on timer GWMessageTimer
19 {
20 output(GW_message);
21 setTimer(GWMessageTimer, cycPepsTime);
22 }
23
24 //模拟按键弹起,物理寻址
25 on timer PhysRespTimer
26 {
27 //注意此处的系统变量格式, ECUName::链路名::变量名, 本篇章节一介绍的在setup处建立节点时,要求配置选择数据库的节点名将在此处生效
28 @sysvar::GW::Conn1::sysSendData = 0;
29 }
30
31 //模拟按键弹起,功能寻址
32 on timer FuncRespTimer
33 {
34 @sysvar::GW::Conn2::sysSendData = 0; //注意此处链路名与上一函数不一样,区分物理寻址和功能寻址主要体现在这里
35 }
36 //监控一个环境变量,整车电源模式。 备注:环境变量可在DBC中创建
37 on envVar PEPS_PwrMode
38 {
39 varPowerMode = getValue(PEPS_PwrMode); //先略过此变量的定义位置,全局变量记录电源状态
40 GW_message.PEPS_PowerMode = varPowerMode;
41 if(varPowerMode==2)
42 {
43 BCM_ATWS = 2; //车身安全锁报警状态变量,略过定义处
44 }
45 if(varPowerMode == 3)//休眠
46 {
47 InactiveGW();
48 }
49 else
50 {
51 ActiveGW();
52 }
53 }
54
55 //模拟按键按下,物理寻址
56 void diagPhysRespMessage()
57 {
58 if(IsResponse){
59 @sysvar::GW::Conn1::sysSendData = 1;
60 setTimer(PhysRespTimer, N_As);
61 }
62 }
63
64 //模拟按键按下,功能寻址
65 void diagFuncRespMessage()
66 {
67 if(IsResponse){
68 @sysvar::GW::Conn2::sysSendData = 1;
69 setTimer(FuncRespTimer, N_As);
70 }
71 }
72
73 on message NWM_message
74 {
75 if(IsBUSActive == 0)
76 {
77 GW_message.PEPS_PowerMode = 0;
78 ActiveGW(); //设备被唤醒,升级定时器触发后 激活信号
79 }
80 }
81
82 //处理来自诊断仪的物理寻址访问GW请求
83 on message 0x701 //此处是捏造的物理寻址诊断ID,根据产品实际的来变更
84 {
85 diagReqMsg=this;
86 writeDbgLevel(level_1, "---physical diagnostic request, id = 0x%x", diagReqMsg.id);
87 SetValue(); //获取当前应回复值
88 diagParseReqMessage(); //解析请求内容
89 diagPhysRespMessage(); //应答请求
90
91 }
92
93 //处理来自诊断仪的功能寻址访问GW请求
94 on message 0x7EE //此处是捏造的功能寻址诊断ID,根据产品实际的来变更
95 {
96 diagReqMsg=this;
97 writeDbgLevel(level_1, "---functional diagnostic request, id = 0x%x", diagReqMsg.id);
98 diagParseReqMessage();
99 diagFuncRespMessage();
100 }
101
102 //初始化仿真的通信信号值
103 void InitGWValue()
104 {
105 putValue(PEPS_PwrMode, 0);
106 GW_message.PEPS_PowerModeValidity = 2;
107 GW_message.PEPS_RemoteControlState = 0;
108 }
109 //初始化数据
110 void InitValue()
111 {
112 //以下是从配置文件读取 GW接到诊断请求时的应答的数据
113 getProfileString("GW", gEntry_1, gDefautStr, cOEMInfo, gLenEntry_1, gFileName);
114 putValue(GWOEMNumber, cOEMInfo); //EPS OEM NO.
115 }
116
117 //获取ECU的回复参数
118 void SetValue()
119 {
120 getValue(GWOEMNumber, cOEMInfo);
121 }
122
123 on start
124 {
125 InitGWValue();
126 ActiveGW();
127 }
128
129 //停止仿真通信报文
130 void InactiveGW()
131 {
132 cancelTimer(GWMessageTimer);
133 IsBUSActive = 0;
134 }
135
136 //仿真通信报文
137 void ActiveGW()
138 {
139 setTimer(GWMessageTimer, cycPepsTime);
140 IsBUSActive = 1;
141 }
142
143 on preStart
144 {
145 InitValue();
146 }
147
148 //获取实时更新的OEM版本号
149 on envVar GWOEMNumber
150 {
151 char dest[100];
152 getValue(GWOEMNumber, cOEMInfo);
153 snprintf(dest, elcount(dest), "\"%s\"", cOEMInfo);
154 writeProfileString("GW", gEntry_1, dest, gFileName);
155 }
156
157 //数据对外发送的统一变量,所有ECU发送数据时通过它外传
158 on envVar varDataToTransmit
159 {
160 getValue(varDataToTransmit, cEnvVarBuffer);
161 }
以上代码,实现了ECU的通信信号仿真,不同的ECU之间的差异在于信号数量不一样、物理请求与功能请求的应答的链路的ECUName不一致, 诊断ID不一致。其余逻辑上完全一致。所以说二次开发很简单,只需要复制代码后 修改此三处即可完成新节点的增加
b. 通用接口实现
1 includes
2 {
3 #include "GenericConn1.cin"
4 #include "GenericConn2.cin" //造好的轮子 建立链路,分别实现物理寻址与功能寻址
5 #include "Common.cin" //通用接口封装在此处
6 }
7
8 variables
9 {
10 char gECU[10] = "%NODE_NAME%"; //此变量是获取当前通信节点的名称,此处与通信链路中的ECUName很自然的关联起来了
11 enum AddressModes { kNormal = 0,
12 kExtendedBased = 1,
13 kNormalFixed = 2,
14 kMixed = 3,
15 //......略去下面很多代码
16 }
diagParseReqMessage()实现,解析总线上的诊断请求报文
1 /***********************************************************
2 * description : 解析收到的报文
3 * creation date: 2018/11/13
4 * author : XXX
5 * revision date:
6 * revision log :
7 * modifier :
8 ***********************************************************/
9 void diagParseReqMessage()
10 {
11 byte fBValue;
12 byte hNibble; //高四位
13 byte lNibble; //低四位
14 byte sid = 0x0;
15 byte reserveSid = 0x0; //针对多帧请求的服务有效,特别预留
16
17 int remainderBLen; //剩余未传输字节
18 int remainderFrameCnt=0;
19 int consecutiveFrameCnt=0;
20 //获取首字节信息
21 fBValue = diagReqMsg.byte(0);
22 writeDbgLevel(level_1, "---The First Byte: 0x%02x", fBValue);
23 hNibble = (fBValue>>4) & 0xf;
24 lNibble = fBValue & 0xf;
25 //writeDbgLevel(level_1, "high 4 bits=%d, low 4 bits=%d", hNibble, lNibble);
26 IsResponse= 0; //初始化时默认不发送应答,需要发送应答时置位1
27 //解析高字节信息
28 if(0x0 == hNibble) //单帧
29 {
30 SF_DL = lNibble;
31 sid = diagReqMsg.byte(1);
32 writeDbgLevel(level_1, "SF: SF_DL=%d, sid=0x%x", SF_DL, sid);
33 if(0x2e==sid){//写入服务
34 subServiceId = ((diagReqMsg.byte(2)<<8)&0xffff)+diagReqMsg.byte(3);
35 writeDbgLevel(level_1, "---SF:sid=0x%02x, ssid=0x%x---", sid, subServiceId);
36 }
37 else if(0x31==sid) //擦写 05 71 01 FF 01 04 AA AA
38 {
39 checkSum = (diagReqMsg.byte(2)<<24) | (diagReqMsg.byte(3)<<16)
40 |(diagReqMsg.byte(4)<<8) | diagReqMsg.byte(5);
41 writeDbgLevel(level_1, "---SF:crc or flush, 0x%x---", checkSum);
42 }
43 diagProcessSFRequest(sid); //根据实际服务回复应答内容
44 }
45 else if(0x1 == hNibble) //多帧首帧
46 {
47 FF_DL = ((lNibble<<8)&0xfff) + diagReqMsg.byte(1);
48 reserveSid = diagReqMsg.byte(2);
49 remainderFrameCnt = 0; //回复0值
50 consecutiveFrameCnt = 0; //置0连续帧
51 remainderBLen = (FF_DL - 6);
52 writeDbgLevel(level_1, "---MF:sid=0x%02x", reserveSid);
53 if(reserveSid==0x2e){
54 subServiceId = ((diagReqMsg.byte(3)<<8)&0xffff)+diagReqMsg.byte(4);
55 writeDbgLevel(level_1, "---MF:ssid=0x%x---", subServiceId);
56 }
57 else if(reserveSid==0x36) //经验, 将数据放置在左边,可避免少写=的异常
58 {
59 transferDataSN = diagReqMsg.byte(3);
60 writeDbgLevel(level_1, "---MF:data sn=0x%x---", transferDataSN);
61 }
62 else if(reserveSid==0x31) //校验
63 {
64 checkSum = (diagReqMsg.byte(3)<<24) | (diagReqMsg.byte(4)<<16)
65 |(diagReqMsg.byte(5)<<8) | diagReqMsg.byte(6);
66 writeDbgLevel(level_1, "---MF:crc or flush, 0x%x---", checkSum);
67 IsCRCDone = 1; //已校验过 刷写完成
68 }
69
70 if(remainderBLen%7 == 0)
71 {
72 remainderFrameCnt = remainderBLen/7;
73 }
74 else
75 {
76 remainderFrameCnt = remainderBLen/7 + 1;
77 }
78 writeDbgLevel(level_1, "MF: FF_DL=%d,remainder frame count=%d", FF_DL, remainderFrameCnt);
79 }
80 else if(0x2 == hNibble) //连续帧
81 {
82 SN = lNibble;
83 consecutiveFrameCnt += 1;
84 writeDbgLevel(level_1, "CF: SN=%x, current count=%d", SN, consecutiveFrameCnt);
85 sid = 0x0;
86 }
87 else if(0x3 == hNibble) //流控帧
88 {
89 FS = lNibble;
90 BS = diagReqMsg.byte(1);
91 STmin = diagReqMsg.byte(2);
92 writeDbgLevel(level_1, "FC: FS=%d, BS=%d, ST min=%d", FS, BS, STmin);
93 sid = 0x0;
94 }
95 else
96 {
97 writeDbgLevel(level_1, "error frame");
98 }
99
100 //响应多帧请求
101 if(remainderFrameCnt!=0)
102 {
103 if(remainderFrameCnt == consecutiveFrameCnt)
104 {
105 diagProcessMFRequest(reserveSid); //封装具体的应答逻辑,可以根据诊断协议获知
106 IsResponse= 1;
107 consecutiveFrameCnt = 0;
108 }
109 }
110 }
完成了车内ECU的仿真,启动CANoe后,仿真的ECU就可以验证TBOX的FOTA流程正确性啦。
--------------完结-------------------
以上只实现了正向刷写流程的验证,覆盖异常场景还需做更多的开发工作。
仿真测试极具灵活性与扩展性,测试时可以根据需求加入或移除节点。这非常便于在开发过程中持续集成的实施。
仿真测试对于构造异常场景的测试条件比实车上简单,非破坏性的且可重复的测试手段,测试数据和过程可控可追溯。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号