机械设计名词之形位公差
在实际生产过程中,对图纸标注的形位公差理解错误,就会使加工分析、加工结果与要求偏离,甚至最后产生报废产品。因此,对形位公差的研究与学习成了机械设计的重要课程。
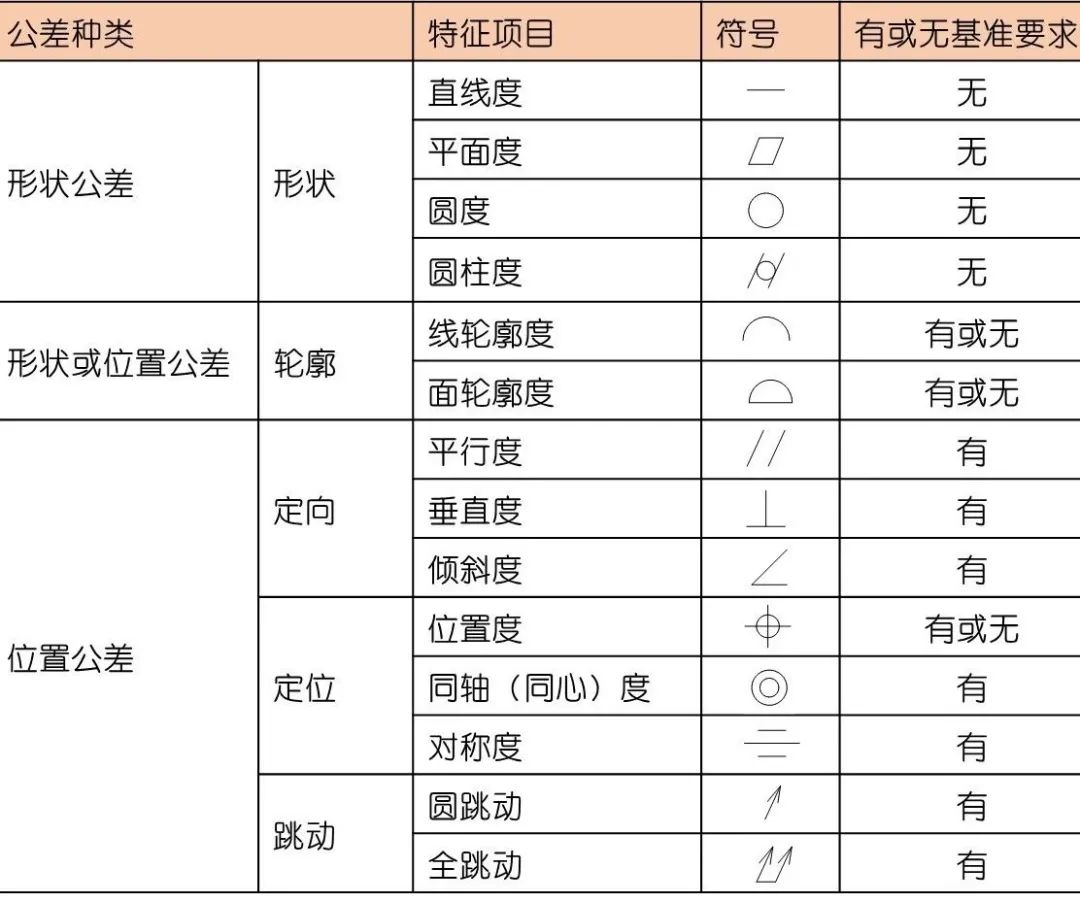
今天,就让我们一起来系统了解14项形位公差。下表是国际统一化的14项形位公差符号。
(参考“UG一NX教程公众号”发布的文章,仅用于学习,不用于商业用途)
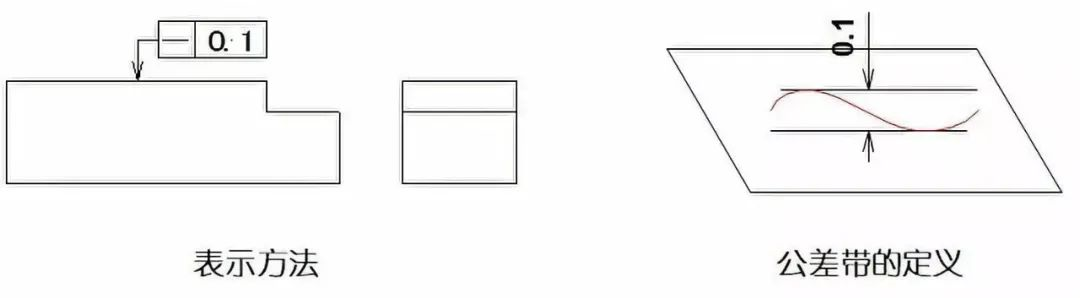
第一种 直线度
直线度,即通常所说的平直程度,表示零件上的直线要素实际形状保持理想直线的状况。直线度公差是实际线对理想直线所允许的最大变动量。
示例1:在给定平面内,公差带必须在距离为0.1mm的两平行直线间的区域。
示例2:在公差值前加注记号Φ、则公差带必须在直径0.08mm的圆柱面内的区域。

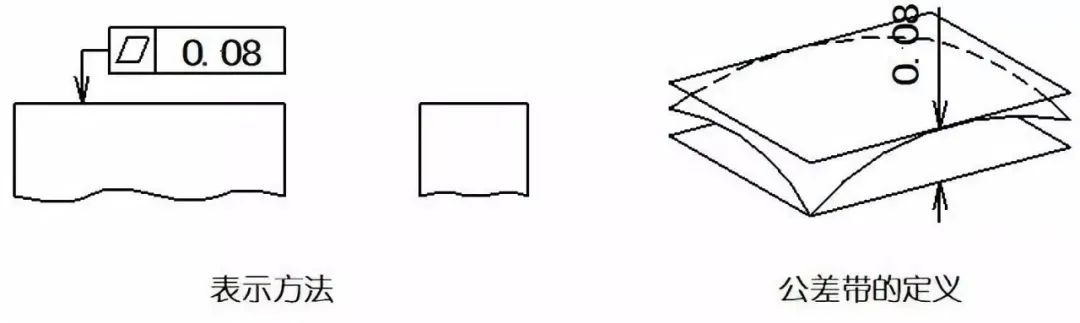
第二种 平面度
平面度,即通常所说的平整程度,表示零件的平面要素实际形状,保持理想平面的状况。平面度公差是实际表面对理想平面所允许的最大变动量。
示例:公差带是位于距离0.08mm的两个平行平面之间的区域。
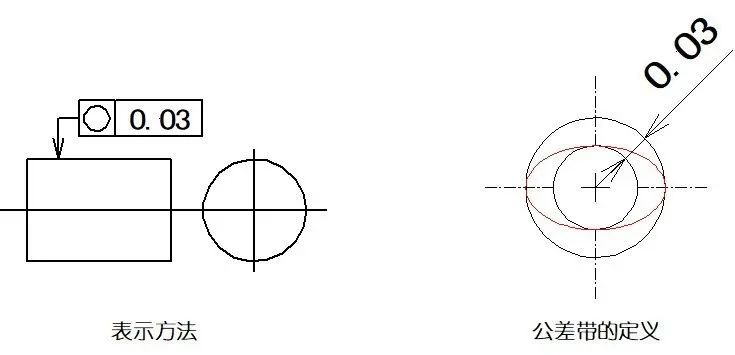
第三种 圆度
圆度,即通常所说的圆整程度,表示零件上圆的要素实际形状与其中心保持等距的状况。圆度公差是在同一截面上,实际圆对理想圆所允许的最大变动量。
示例:公差带必须在同一正截面上,半径差为公差值0.03mm的两个同心圆之间的区域。
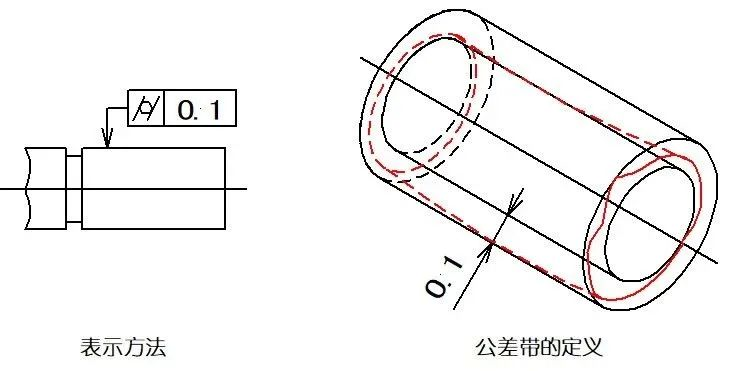
第四种 圆柱度
圆柱度是表示零件上圆柱面外形轮廓上的各点,对其轴线保持等距状况。圆柱度公差是实际圆柱面对理想圆柱面所允许的最大变动量。
示例:公差带是半径差为公差值0.1mm的两个同轴圆柱面之间的区域。
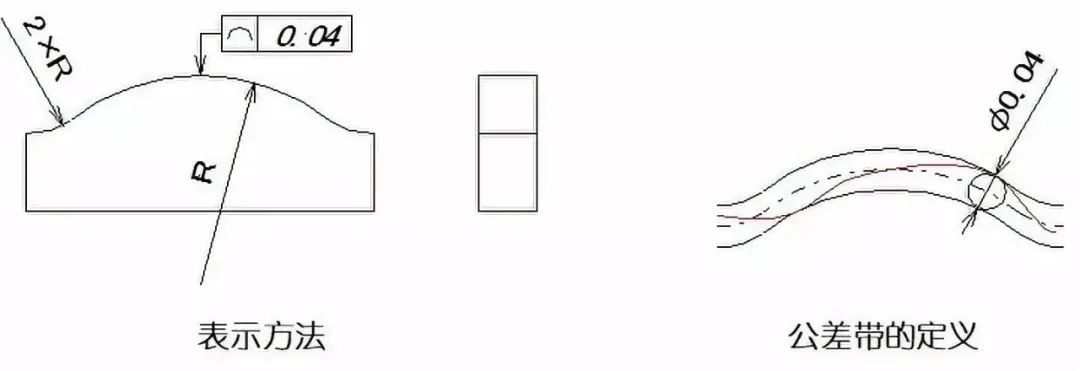
第五种 线轮廓度
线轮廓度是表示在零件的给定平面上,任意形状的曲线,保持其理想形状的状况。线轮廓度公差是指非圆曲线的实际轮廓线的允许变动量。
示例:公差带是由包络一系列直径为公差0.04mm的圆的两包络线之间的区域。诸圆的圆心位于具有理论正确几何形状的线上。
第六种 面轮廓度
面轮廓度是表示零件上的任意形状的曲面,保持其理想形状的状况。面轮廓度公差是指非圆曲面的实际轮廓线,对理想轮廓面的允许变动量。
示例:公差带是由包络一系列直径为0.02mm的球的两条包络线之间,诸球的中心理论上应位于理论正确几何形状的面上。

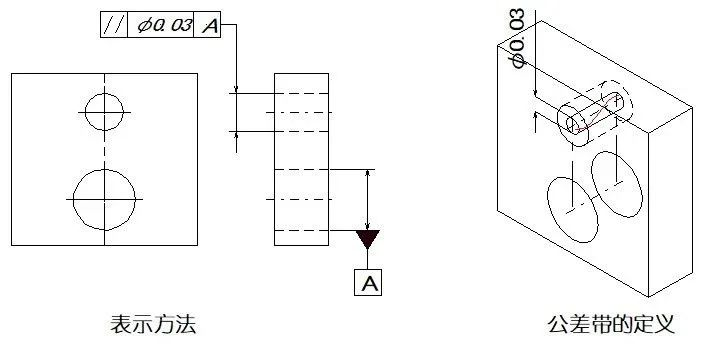
第七种 平行度
平行度,即通常所说的保持平行的程度,表示零件上被测实际要素相对于基准保持等距离的状况。平行度公差是被测要素的实际方向,与基准相平行的理想方向之间所允许的最大变动量。
示例:如公差值前加注记号Φ、则公差带为基准平行直径Φ0.03mm的圆柱面内。
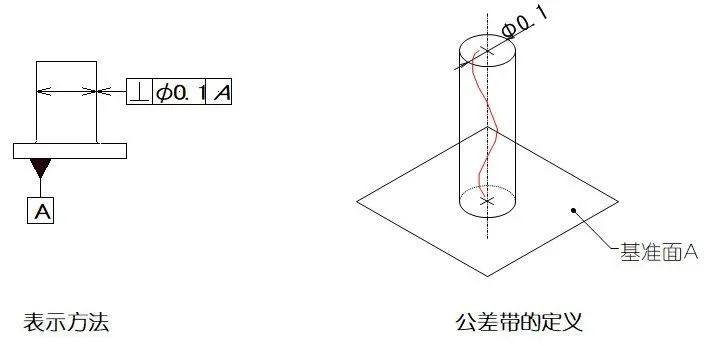
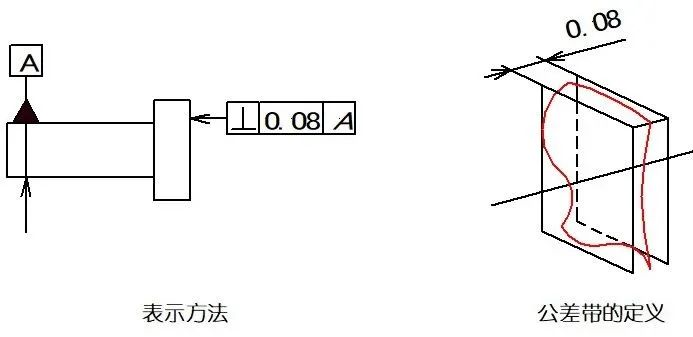
第八种 垂直度
垂直度,即通常所说的两要素之间保持正交的程度,表示零件上被测要素相对于基准要素,保持正确的90°夹角状况。垂直度公差是被测要素的实际方向,对于基准相垂直的理想方向之间所允许的最大变动量。
示例1:公差带前加注记号Φ,则公差带垂直于基准面直径为0.1mm的圆柱面内。
示例2:公差带必须位于距离为0.08mm且垂直于基准线的两平行平面之间。
第九种 倾斜度
倾斜度是表示零件上两要素相对方向保持任意给定角度的正确状况。倾斜度公差是被测要素的实际方向,对于基准成任意给定角度的理想方向之间所允许的最大变动量。
示例1:被测轴线的公差带是距离为公差值0.08mm,且与基准面A成理论角度60°的两平行平面之间的区域。
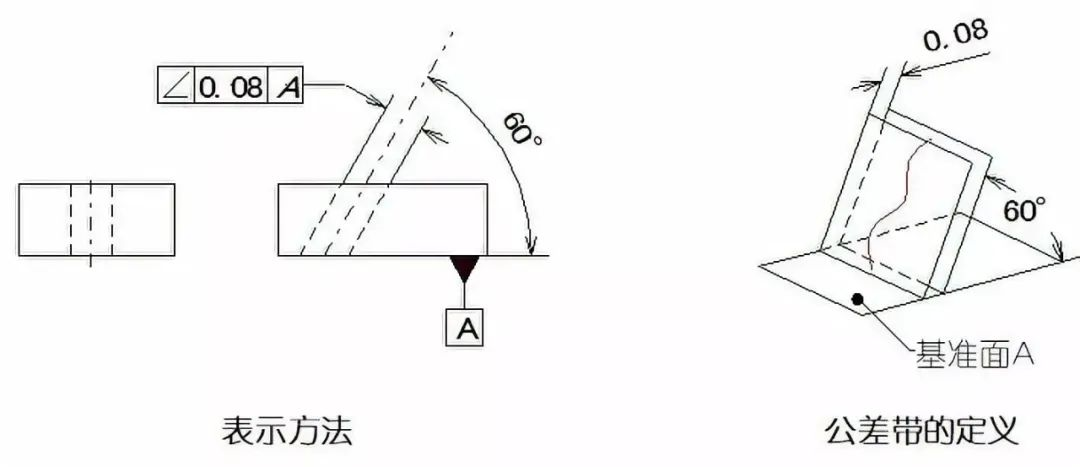
示例2:在公差值前加注记号Φ,则公差带必须位于直径为0.1mm的圆柱面内。该公差带应平行于垂直于基准A的平面B,并与基准A呈理论正确角度60°。

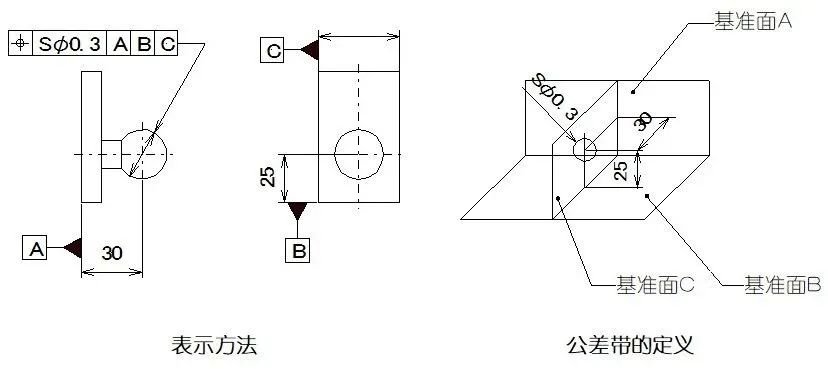
第十种 位置度
位置度是表示零件上的点、线、面等要素,相对其理想位置的准确状况。位置度公差是被测要素的实际位置相对于理想位置所允许的最大变动量。
示例:公差带前加注记号SΦ时、公差带是直径0.3mm的球内区域。球公差带的中心点的位置是相对于基准A、B及C的理论正确尺寸。
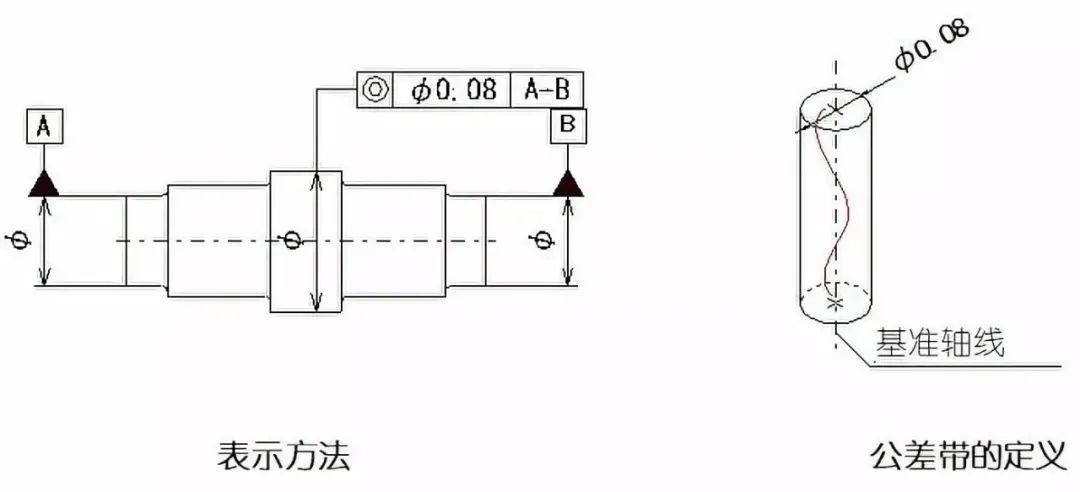
第十一种 同轴(同心)度
同轴度,即通常所说的共轴程度,表示零件上被测轴线相对于基准轴线,保持在同一直线上的状况。同轴度公差是被测实际轴线相对于基准轴线所允许的变动量。
示例:公差值加注记号时,公差带是直径0.08mm的圆柱之间区域。圆形公差带的轴线与基准一致。
第十二种 对称度
对称度是表示零件上两对称中心要素保持在同一中心平面内的状态。对称度公差是实际要素的对称中心面(或中心线、轴线)对理想对称平面所允许的变动量。
示例:公差带是距离为0.08mm、且相对于基准中心平面或中心线对称配置的两平行平面之间或直线之间的区域。

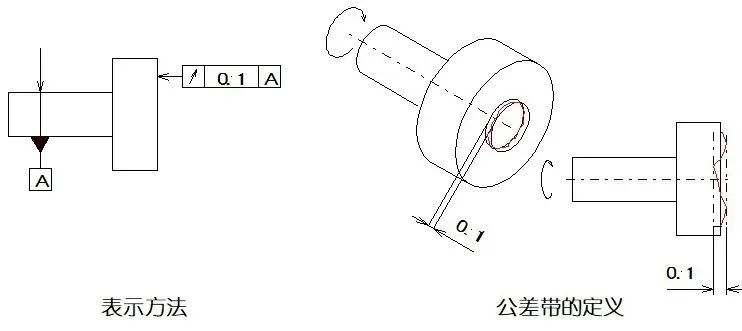
第十三种 圆跳动
圆跳动是表示零件上的回转表面在限定的测量面内,相对于基准轴线保持固定位置的状况。圆跳动公差是被测实际要素绕基准轴线,无轴向移动地旋转一整圈时,在限定的测量范围内所允许的最大变动量。
示例1:公差带是垂直于任一测量平面内,半径差为0.1mm,且圆心在同一基准轴线上的两同心圆之间的区域。

示例2:公差带是在与基准同轴的任一半径位置的测量圆柱面上距离为0.1mm的两个圆之间的区域。
第十四种 全跳动
全跳动是指零件绕基准轴线作连续旋转时,沿整个被测表面上的跳动量。全跳动公差是被测实际要素绕基准轴线连续的旋转,同时指示器沿其理想轮廓相对移动时所允许的最大跳动量。
示例1:公差带是距离为半径差0.1mm,且与基准同轴的两圆柱面之间的区域。

示例2:公差带是距离为半径差0.1mm,且与基准垂直的两平行平面之间的区域。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号