import reader import numpy as np import tensorflow as tf # 数据参数 DATA_PATH = 'simple-examples/data/' # 数据存放路径 VOCAB_SIZE = 10000 # 单词数量 # 神经网络参数 HIDDEN_SIZE = 200 # LSTM隐藏层规模 NUM_LAYERS = 2 # LSTM结构层数 LEARNING_RATE = 1.0 # 学习速率 KEEP_PROB = 0.5 # 节点不被dropout的概率 MAX_GRAD_NORM = 5 # 用于控制梯度膨胀的参数 # 训练参数 TRAIN_BATCH_SIZE = 20 # 训练数据batch大小 # 图片张数 TRAIN_NUM_STEP = 35 # 训练数据截断长度 # 图片行数 # 测试参数 EVAL_BATCH_SIZE = 1 # 测试数据batch大小 EVAL_NUM_STEP = 1 # 测试数据截断 NUM_EPOCH = 2 # 使用训练数据的轮数 # 通过PTBModel描述模型,方便维护循环神经网络中的状态 class PTBModel(): def __init__(self, is_training, batch_size, num_steps): # 记录batch和截断长度 self.batch_size = batch_size self.num_steps = num_steps # 定义输入层 self.input_data = tf.placeholder(tf.int32, [batch_size, num_steps]) # 定义预期输出 self.targets = tf.placeholder(tf.int32, [batch_size, num_steps]) # 注意输入输出shape一样 # 定义LSTM为使用dropout的两层网络 lstm_cell = tf.contrib.rnn.BasicLSTMCell(HIDDEN_SIZE) if is_training: lstm_cell = tf.contrib.rnn.DropoutWrapper(lstm_cell, output_keep_prob=KEEP_PROB) cell = tf.contrib.rnn.MultiRNNCell([lstm_cell] * NUM_LAYERS) # 初始化state self.initial_state = cell.zero_state(batch_size, tf.float32) # 将单词ID转为单词向量。每个单词都是HIDDEN_SIZE维 embedding = tf.get_variable('embedding', [VOCAB_SIZE, HIDDEN_SIZE]) # 将原本batch_size*num_steps的输入层转化为batch_size*num_steps*HIDDEN_SIZE inputs = tf.nn.embedding_lookup(embedding, self.input_data) # 只在训练时使用dropout if is_training: inputs = tf.nn.dropout(inputs, KEEP_PROB) # 定义输出列表 outputs = [] state = self.initial_state with tf.variable_scope('RNN'): for time_step in range(num_steps): if time_step > 0: tf.get_variable_scope().reuse_variables() cell_output, state = cell(inputs[:, time_step, :],state) # 将当前时刻的数据和状态传入LSTM outputs.append(cell_output) # 将当前输出加入输出列表 # 将输出列表展开成[batch,hidden_size*num_steps] # 再reshape成[batch*num_steps,hidden_size] output = tf.reshape(tf.concat(outputs, 1), [-1, HIDDEN_SIZE]) # 将输出传入全连接层,每个时刻的输出都是长度为VOCAB_SIZE的数组 weight = tf.get_variable('weight', [HIDDEN_SIZE, VOCAB_SIZE]) bias = tf.get_variable('bias', [VOCAB_SIZE]) logits = tf.matmul(output, weight) + bias # 定义交叉熵损失函数,sequence_loss_by_example计算一个序列的交叉熵的和 loss = tf.contrib.legacy_seq2seq.sequence_loss_by_example( [logits], # 预测结果 [tf.reshape(self.targets, [-1])], # 预期结果。将[batch_size,num_steps]压缩成一维 [tf.ones([batch_size * num_steps], dtype=tf.float32)] # 损失的权重。这里所有的权重都为1,表示不同batch和不同时刻的重要程度都一样 ) # 计算得到每个batch的平均损失 self.cost = tf.reduce_sum(loss) / batch_size self.final_state = state # 只在训练时反向传播 if not is_training: return trainable_variables = tf.trainable_variables() grads, _ = tf.clip_by_global_norm(tf.gradients(self.cost, trainable_variables), MAX_GRAD_NORM) # 控制梯度大小。避免梯度膨胀 # 定义优化方法 optimizer = tf.train.GradientDescentOptimizer(LEARNING_RATE) # 定义训练步骤 self.train_op = optimizer.apply_gradients(zip(grads, trainable_variables)) # 使用给定的model在data上运行train_op并返回在全部数据上的perplexity def run_epoch(session, model, data_queue, train_op, output_log, epoch_size): # 计算perplexity的辅助变量 total_costs = 0.0 iters = 0 state = session.run(model.initial_state) # 使用当前数据训练或测试模型 for step in range(epoch_size): # 生成输入和答案 feed_dict = {} x, y = session.run(data_queue) feed_dict[model.input_data] = x feed_dict[model.targets] = y # 将状态转为字典 for i, (c, h) in enumerate(model.initial_state): feed_dict[c] = state[i].c feed_dict[h] = state[i].h # 获取损失值和下一个状态 cost, state, _ = session.run( [model.cost, model.final_state, train_op], feed_dict=feed_dict ) # 在当前batch上运行train_op并计算损失值。交叉熵损失函数计算的是下一个单词为给定单词的概率 total_costs += cost iters += model.num_steps # 训练时输出日志 if output_log and step % 100 == 0: print('After %d steps,perplexity is %.3f' % (step, np.exp(total_costs / iters))) return np.exp(total_costs / iters) def main(_): # 原始数据 train_data, valid_data, test_data, _ = reader.ptb_raw_data(DATA_PATH) # 计算一个epoch需要训练的次数 train_data_len = len(train_data) # 数据集的大小 train_batch_len = train_data_len // TRAIN_BATCH_SIZE # batch的个数 train_epoch_size = (train_batch_len - 1) // TRAIN_NUM_STEP # 该epoch的训练次数 valid_data_len = len(valid_data) valid_batch_len = valid_data_len // EVAL_BATCH_SIZE valid_epoch_size = (valid_batch_len - 1) // EVAL_NUM_STEP test_data_len = len(test_data) test_batch_len = test_data_len // EVAL_BATCH_SIZE test_epoch_size = (test_batch_len - 1) // EVAL_NUM_STEP # 定义初始化函数 initializer = tf.random_uniform_initializer(-0.05, 0.05) # 定义训练用的模型 with tf.variable_scope('language_model', reuse=None, initializer=initializer): train_model = PTBModel(True, TRAIN_BATCH_SIZE, TRAIN_NUM_STEP) # 定义评估用的模型 with tf.variable_scope('language_model', reuse=True, initializer=initializer): eval_model = PTBModel(False, EVAL_BATCH_SIZE, EVAL_NUM_STEP) # 生成数据队列,必须放在开启多线程之前 train_queue = reader.ptb_producer(train_data, train_model.batch_size,train_model.num_steps) valid_queue = reader.ptb_producer(valid_data, eval_model.batch_size, eval_model.num_steps) test_queue = reader.ptb_producer(test_data, eval_model.batch_size, eval_model.num_steps) with tf.Session() as sess: tf.global_variables_initializer().run() # 开启多线程从而支持ptb_producer()使用tf.train.range_input_producer() coord = tf.train.Coordinator() threads = tf.train.start_queue_runners(sess=sess, coord=coord) # 使用训练数据训练模型 for i in range(NUM_EPOCH): print('In iteration: %d' % (i + 1)) run_epoch(sess, train_model, train_queue, train_model.train_op, True, train_epoch_size) # 训练模型 valid_perplexity = run_epoch(sess, eval_model, valid_queue, tf.no_op(), False, valid_epoch_size) # 使用验证数据评估模型 print('Epoch: %d Validation Perplexity: %.3f' % (i + 1, valid_perplexity)) # 使用测试数据测试模型 test_perplexity = run_epoch(sess, eval_model, test_queue, tf.no_op(), False, test_epoch_size) print('Test Perplexity: %.3f' % test_perplexity) # 停止所有线程 coord.request_stop() coord.join(threads) if __name__ == '__main__': tf.app.run()
理解这个代码之前最好先理解LSTM手写数字识别。
类比图像解释自然语言处理
1. 自然语言的输入需要先把句子截成固定长度的片段,这就是一个序列,也就是一张图片,片段中的每一个字或者词就是图片的一行,lstm每个时序输入这个字或者词。
2. 不同之处在于,自然语言每个时序都有x和y,y就是x后的那个字或者词,而图片是很多x一个y,这决定了两者的网络结构不同。
3. 所以测试时,自然语言不需要输入完整序列,也就是不需要截断,而图片每次要输入一张,即完整序列。
类比之后就非常容易理解了,但是代码中有个细节还是需要思考一下的。
# 定义输入层 self.input_data = tf.placeholder(tf.int32, [batch_size, num_steps]) # 将单词ID转为单词向量。每个单词都是HIDDEN_SIZE维 embedding = tf.get_variable('embedding', [VOCAB_SIZE, HIDDEN_SIZE]) # 将原本batch_size*num_steps的输入层转化为batch_size*num_steps*HIDDEN_SIZE inputs = tf.nn.embedding_lookup(embedding, self.input_data)
这里官方注释的不是很清楚,我是这么理解的。
这个input是单词ID,embedding是所有单词的初始化权重,embedding_lookup 操作就是wx操作,因为wx是隐层的输入,所以维度是 HIDDEN_SIZE
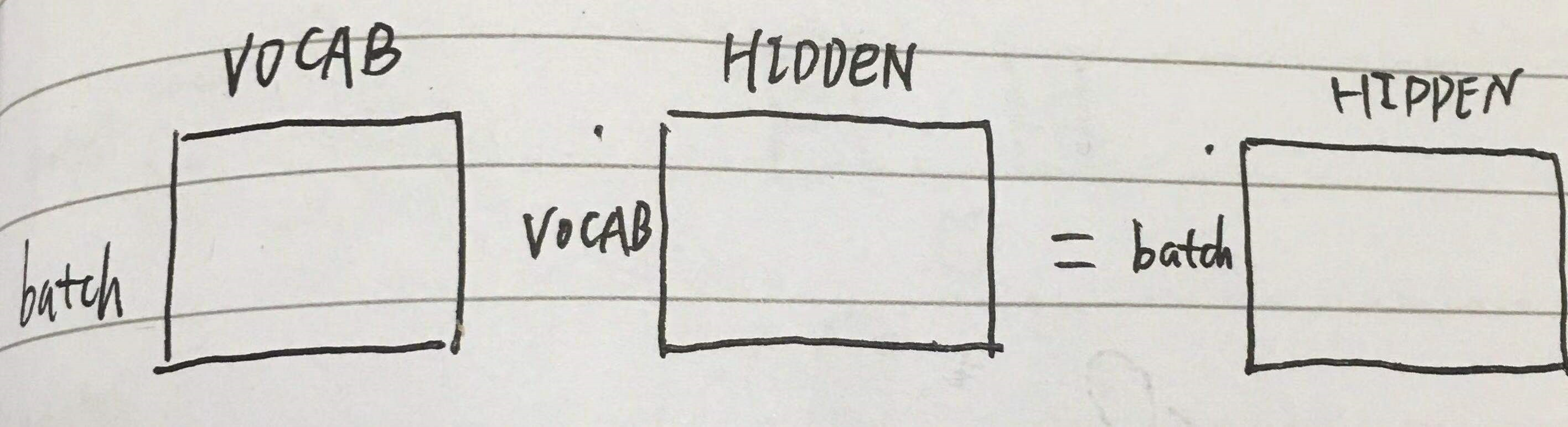
假设我们只有2个单词,隐层3个神经元
那我们手动表示应该是这样的

embedding_lookup 是这样的



 浙公网安备 33010602011771号
浙公网安备 33010602011771号