【算法】python版A-Star(A星)寻路
import pygame import math from queue import PriorityQueue # 初始化屏幕 WIDTH = 800 WIN = pygame.display.set_mode((WIDTH, WIDTH)) pygame.display.set_caption("A* Path Finding Algorithm") # 定义颜色 RED = (255, 0, 0) GREEN = (0, 255, 0) BLUE = (0, 255, 0) YELLOW = (255, 255, 0) WHITE = (255, 255, 255) BLACK = (0, 0, 0) PURPLE = (128, 0, 128) ORANGE = (255, 165, 0) GREY = (128, 128, 128) TURQUOISE = (64, 224, 208) # 定义节点类 class Node: def __init__(self, row, col, width, total_rows): self.row = row self.col = col self.x = row * width self.y = col * width self.color = WHITE self.neighbors = [] self.width = width self.total_rows = total_rows def get_pos(self): return self.row, self.col def is_closed(self): return self.color == RED def is_open(self): return self.color == GREEN def is_barrier(self): return self.color == BLACK def is_start(self): return self.color == ORANGE def is_end(self): return self.color == TURQUOISE def reset(self): self.color = WHITE def make_start(self): self.color = ORANGE def make_closed(self): self.color = RED def make_open(self): self.color = GREEN def make_barrier(self): self.color = BLACK def make_end(self): self.color = TURQUOISE def make_path(self): self.color = PURPLE def draw(self, win): pygame.draw.rect(win, self.color, (self.x, self.y, self.width, self.width)) def update_neighbors(self, grid): self.neighbors = [] if self.row < self.total_rows - 1 and not grid[self.row + 1][self.col].is_barrier(): # 下 self.neighbors.append(grid[self.row + 1][self.col]) if self.row > 0 and not grid[self.row - 1][self.col].is_barrier(): # 上 self.neighbors.append(grid[self.row - 1][self.col]) if self.col < self.total_rows - 1 and not grid[self.row][self.col + 1].is_barrier(): # 右 self.neighbors.append(grid[self.row][self.col + 1]) if self.col > 0 and not grid[self.row][self.col - 1].is_barrier(): # 左 self.neighbors.append(grid[self.row][self.col - 1]) def __lt__(self, other): return False # 启发式函数 def h(p1, p2): x1, y1 = p1 x2, y2 = p2 dx = x1 - x2 dy = y1 - y2 return math.sqrt(dx ** 2 + dy ** 2) # 几何估价法 return abs(dx) + abs(dy) # 曼哈顿距离 # 重构最短路径 def reconstruct_path(came_from, current, draw): while current in came_from: current = came_from[current] current.make_path() draw() # A* 寻路算法 def algorithm(draw, grid, start, end): count = 0 open_set = PriorityQueue() open_set.put((0, count, start)) came_from = {} g_score = {node: float("inf") for row in grid for node in row} g_score[start] = 0 f_score = {node: float("inf") for row in grid for node in row} f_score[start] = h(start.get_pos(), end.get_pos()) open_set_hash = {start} while not open_set.empty(): for event in pygame.event.get(): if event.type == pygame.QUIT: pygame.quit() current = open_set.get()[2] open_set_hash.remove(current) if current == end: reconstruct_path(came_from, end, draw) end.make_end() return True for neighbor in current.neighbors: temp_g_score = g_score[current] + 1 if temp_g_score < g_score[neighbor]: came_from[neighbor] = current g_score[neighbor] = temp_g_score f_score[neighbor] = temp_g_score + h(neighbor.get_pos(), end.get_pos()) if neighbor not in open_set_hash: count += 1 open_set.put((f_score[neighbor], count, neighbor)) open_set_hash.add(neighbor) neighbor.make_open() # draw() if current != start: current.make_closed() return False # 创建网格 def make_grid(rows, width): grid = [] gap = width // rows for i in range(rows): grid.append([]) for j in range(rows): node = Node(i, j, gap, rows) grid[i].append(node) return grid # 绘制网格线 def draw_grid(win, rows, width): gap = width // rows for i in range(rows): pygame.draw.line(win, GREY, (0, i * gap), (width, i * gap)) for j in range(rows): pygame.draw.line(win, GREY, (j * gap, 0), (j * gap, width)) # 绘制 def draw(win, grid, rows, width): win.fill(WHITE) for row in grid: for node in row: node.draw(win) draw_grid(win, rows, width) pygame.display.update() # 获取点击位置 def get_clicked_pos(pos, rows, width): gap = width // rows y, x = pos row = y // gap col = x // gap return row, col # 主函数 def main(win, width): ROWS = 50 grid = make_grid(ROWS, width) start = None end = None run = True started = False while run: draw(win, grid, ROWS, width) for event in pygame.event.get(): if event.type == pygame.QUIT: run = False if started: continue if pygame.mouse.get_pressed()[0]: # 左键点击 pos = pygame.mouse.get_pos() row, col = get_clicked_pos(pos, ROWS, width) if row < 0 or row >= ROWS or col < 0 or col >= ROWS: continue node = grid[row][col] if not start and node != end: start = node start.make_start() elif not end and node != start: end = node end.make_end() elif node != end and node != start: node.make_barrier() elif pygame.mouse.get_pressed()[2]: # 右键点击 pos = pygame.mouse.get_pos() row, col = get_clicked_pos(pos, ROWS, width) node = grid[row][col] node.reset() if node == start: start = None elif node == end: end = None if event.type == pygame.KEYDOWN: if event.key == pygame.K_SPACE and not started: for row in grid: for node in row: node.update_neighbors(grid) algorithm(lambda: draw(win, grid, ROWS, width), grid, start, end) if event.key == pygame.K_c: start = None end = None grid = make_grid(ROWS, width) pygame.quit() main(WIN, WIDTH)
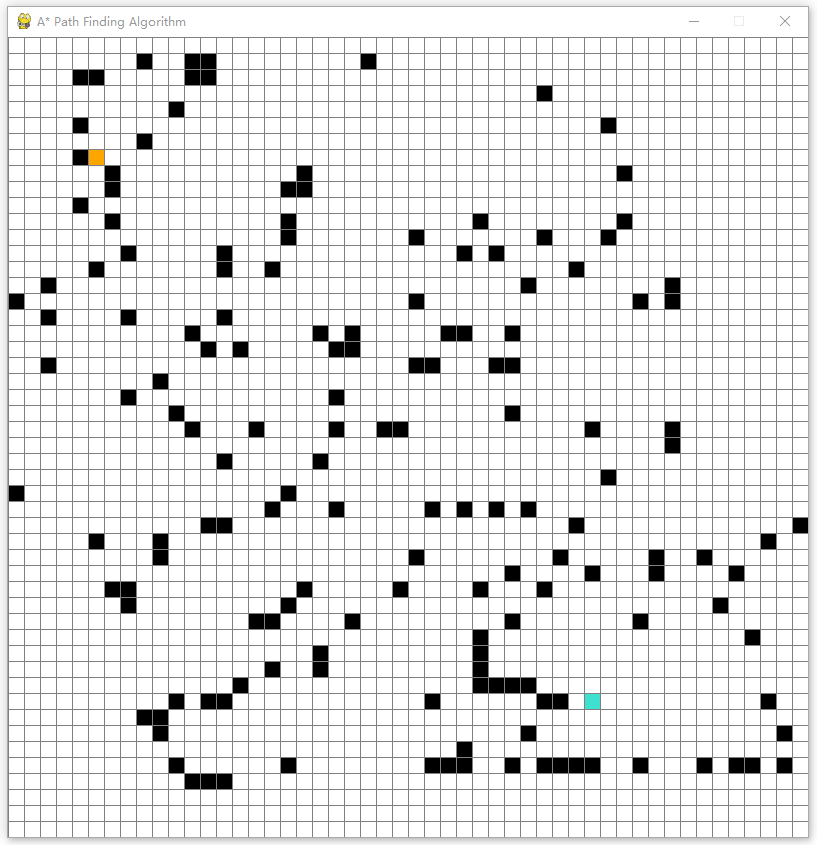
运行效果:

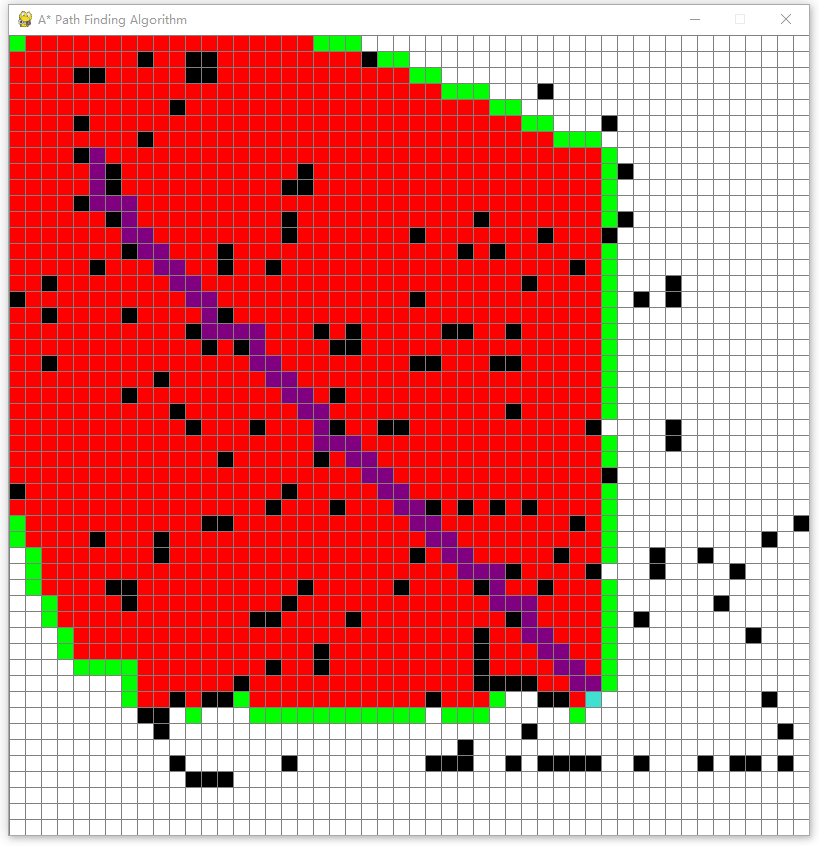
寻路结果:


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2021-12-21 [docker] docker中使用ffmpeg将m3u8转为mp4