2-1. 矩阵论(笔记)
Course:矩阵理论
Textbook:《矩阵理论》- 黄廷柱,《矩阵论》- 方保镕
ISBN:9787040119428, 9787302092087
Link:工程应用数学基础 - 国防科技大学
一、线代基础
1.1. 线性空间
1.1.1. 线性空间
数环
数环是一种特殊的数集,字面意思由数组成的环,是环的最基本的例子和模型。设 \(P\) 是复数集的非空子集,如果 \(P\) 中任意两个数的和、差、积仍属于 \(P\),则称 \(P\) 是一个数环。即数环对前三则基本运算封闭。
例如全体整数的集合 \(Z\),全体有理数的集合 \(Q\),全体实数的集合 \(R\) 和全体复数的集合 \(C\),分别称为整数环、有理数环、实数环和复数环;对数的加法、乘法均构成环;偶数集是数环,称为偶数环;还有各种代数整数环等。
数域
设 \(P\) 是由一些复数组成的集合,其中包括 0 与 1,如果 \(P\) 中任意两个数的和、差、积、商(除数不为 \(0\))仍属于 \(P\),则称 \(P\) 为一个数域。例如复数域 \(\mathbf{C}\),实数域 \(\mathbf{R}\),有理数域 \(\mathbf{Q}\)。
特别的:
- \(z = \{ 0 \}\) 是最小的数环,数环必定含有 0;
- 有理数集 \(\mathbf{Q}\) 是最小的数域,数域必定含有 0 和 1;
线性空间
设 \(V\) 为定义了加法和数乘运算的非空集合,\(P\) 为一个数域,如果 \(\forall \alpha, \beta, \gamma \in V, k, l \in P\),集合 \(V\) 均满足:
- 加法交换律:\(\alpha + \beta = \beta + \alpha\)
- 加法结合律:\((\alpha + \beta) + \gamma = \alpha + (\beta + \gamma)\)
- 唯一零元:\(\alpha + 0 = \alpha\),任意一个元素加上零元均为其本身(零元并不特指整数 0,取决于线性空间的定义)
- 唯一负元:\(\alpha + \beta = 0, \beta = -\alpha\),任意一个元素都存在唯一负元,使二者之和等于零元(而不是整数 0)
- 唯一单位元:\(\alpha \cdot 1 = \alpha\),任意一个元素乘以单位元均为其本身(单位元并不特指整数 1,取决于线性空间的定义)
- 乘法分配律:\((k + l) \alpha = k \alpha + l \alpha\)
- 乘法分配律:\(k(\alpha + \beta) = k \alpha + k \beta\)
- 乘法结合律:\(k \cdot (l \cdot \alpha) = k \cdot l \cdot \alpha\)
则称 \(V\) 为数域 \(P\) 上的线性空间。
线性空间的维数与基
在线性空间 \(V\) 中,如果存在 \(n\) 个向量线性无关,而任意 \(n+1\) 个向量均线性相关,则这 \(n\) 个向量为 \(V\) 的一组基底,\(n\) 为线性空间 \(V\) 的维数,记为 \(dim \ V = n\)。
例如复线性空间 \(\mathbf{C}\) 在实数域上是二维的,基为 \(\{1, i\}\);在复数域上是一维的,基为 \(\{1\}\)。
坐标
设 \(x_1, ..., x_n\) 为线性空间 \(V\)(数域 \(P\) 上)的一组基,则 \(\forall x \in V\),都有且仅有一组数 \(a_1, ..., a_n \in P\) 使得 \(x = a_1 x_1 + ... + a_n x_n\),则 \((a_1, ..., a_n)^T\) 称为 \(x\) 在基底 \(x_1, ..., x_n\) 下的坐标。
过渡矩阵
设 \(\alpha = \{ \alpha_1, ..., \alpha_n \}, \beta = \{ \beta_1, ..., \beta_n \}\) 为线性空间 \(V\) 的两组不同基,则存在可逆矩阵 \(P\),使得基底 \(\alpha\) 过渡到基底 \(\beta\):
维数公式
设 \(V_1, V_2\) 为线性空间 \(V\) 的子空间,分别定义两者的和空间和交空间如下:
- \(V_1 + V_2 = \{ \alpha = \alpha_1 + \alpha_2 \ | \ \alpha_1 \in V_1, \alpha_2 \in V_2 \}\)
- \(V_1 \cap V_2 = \{ \alpha \ | \ \alpha \in V_1 \cap V_2\}\)
则有维数公式如下:
1.1.2. 线性子空间
定义
子空间为包含于向量空间内的一个向量空间。它是原向量空间的一个子集,而且本身也满足向量空间的要求。注意其与子集的区别,所有元素都在原空间之内就可称之为子集,但是要满足对线性运算封闭的子集才能成为子空间。
张成子空间
设 \(\alpha_1, ..., \alpha_n\) 为线性空间 \(V\) 的一组向量(不一定是基,也可能线性相关),则这组向量的所有可能的线性组合行成的集合,被称为 \(\{\alpha_1, ..., \alpha_n\}\) 的张成子空间,记作 \(span \{ \alpha_1, ..., \alpha_n \} = \{ k_1 \alpha_1 + ... + k_n \alpha_n \}\),其中 \(k_i \in P\)。
直和
设 \(V_1, V_2\) 为线性空间 \(V\) 的子空间,且 \(\forall \alpha \in V_1 + V_2\),下面的表示方式有且仅有一种,则称 \(V_1 + V_2\) 为直和,记作 \(V_1 \oplus V_2\):
\(V_1 + V_2\) 为直和,等价于:
- \(V_1 \cap V_2\) 为零子空间 \(\{0\}\)
- \(dim(V_1 + V_2) = dim(V_1) + dim(V_2)\)
- \(V_1\) 的基和 \(V_2\) 的基,放在一起就是 \(V\) 的基
不变子空间
设 \(T\) 为 线性空间 \(V\) 的线性变换,\(V_1\) 为 \(V\) 的子空间,如果 \(\forall \alpha \in V_1\) 都有 \(T \alpha \in V_1\),则称 \(V_1\) 为 \(V\) 的不变子空间。
空间正交
设 \(V_1, V_2\) 为线性空间 \(V\) 的子空间,如果 \(\forall \alpha \in V_1, \beta \in V_2\) 都有 \(\alpha \bot \beta\),则称 \(V_1\) 与 \(V_2\) 相互正交,记为 \(V_1 \bot V_2\)。
特别的,如果 \(V_1 \bot V_2\),则有 \(V_1 + V_2 = V_1 \oplus V_2\),即 \(V_1 \cap V_2 = \{0\}\),两个正交空间的交集只有一个零元素。
正交补
设 \(V_1, V_2\) 为线性空间 \(V\) 的子空间,如果 \(V_1 \bot V_2\) 且 \(V_1 \oplus V_2\),则称 \(V_1, V_2\) 互为正交补,记作 \(V_1 = V_2^{\perp}, V_2 = V_1^{\perp}\)。
特别的,线性空间 \(V = V_1 \oplus V_1^\perp = V_2 \oplus V_2^\perp\) 称为 \(V\) 的正交直和分解。
1.2. 线性变换
1.2.1. 线性变换
定义
设 \(V_1, V_2\) 为数域 \(P\) 上的两个线性空间,\(f\) 为 \(V_1 \rightarrow V_2\) 的映射,对于 \(\alpha, \beta \in V_1, k \in P\),如果满足线性的两个条件:
- 可加性:\(f(\alpha + \beta) = f(\alpha) + f(\beta)\)
- 齐次性:\(f(k \alpha) = k f(\alpha)\)
则称 \(f\) 为 \(V_1 \rightarrow V_2\) 的线性变换或线性算子(后面一般不用符号 \(f\),而是符号 \(T\))。
线性变换的矩阵表示
设 \(T: V^n \rightarrow V^m\) 为线性变换,\(\alpha = \{\alpha_1, ..., \alpha_n \}, \beta = \{ \beta_1, ..., \beta_m\}\) 分别是两个空间的基,则有:
则矩阵 \(A\) 称为线性变换 \(T\) 在基偶 \(\{\alpha, \beta\}\) 下的矩阵。当 \(m=n\) 时,两个线性空间可以使用相同的基,此时\(A\) 为方阵,简称为 \(T\) 在基 \(\alpha\) 下的矩阵。
1.2.2. 零空间与列空间
零空间(化零空间、核空间)
矩阵 \(A\) 的零空间 \(N(A)\) 是满足 \(Ax = 0\) 的所有 \(x\) 的集合。即对于 \(A \in \mathbf{C}^{m \times n}\),有:
求解 \(A x = 0\) 的问题,比如 \(A \in \mathbf{C}^{4 \times 3}, rank \ A = 2\),则 \(N(A)\) 应该是 \(\mathbf{R}^3\) 内的一个子空间。
列空间(值空间)
矩阵 \(A\) 的列空间 \(R(A)\) 是其列向量的所有线性组合所构成的空间。即对于 \(A \in \mathbf{C}^{m \times n}\),有:
求解 \(A x = b\) 的问题,对于给定的矩阵 \(A\),显然不是任意的 \(b\) 都一定能得到解。比如上例中的矩阵 \(A\),它的值空间即为两个无关列向量的张成空间,即 \(R(A)\) 为 \(\mathbf{R}^4\) 内的一个二维子空间。
设矩阵 \(A \in \mathbf{C}^{m \times n}\),关于零空间和列空间,有如下推论:
- \(R(A) \bot N(A^H)\)
- \(N(A) \bot R(A^H)\)
- \(dim R(A) + dim N(A^H) = m\)
- \(dim R(A^H) + dim N(A) = n\)
- \(\mathbf{C}^m = R(A) \oplus N(A^H)\)
- \(\mathbf{C}^n = R(A^H) \oplus N(A)\)
1.2.3. Householder 变换
对向量 \(x \in \mathbf{C}^n\) 进行 Householder 变换使之与标准单位向量 \(e_i \in \mathbf{C}^n\)(第 i 行为 1,其余行为 0)同向:
- 计算 \(a = \Vert x \Vert_2\)
- 计算向量 \(u = \frac{x - a e_1}{\Vert x - a e_1 \Vert_2}\)
- 计算矩阵 \(H = I_n - 2 u u^H\)
- 则有 \(H x = k e_1\)
1.2.4. Givens 变换
1.3. 内积空间
1.3.1. 欧式空间
设 \(V\) 是 \(n\) 维实线性空间,如果 \(\forall \alpha, \beta \in V\),都有一个实数与二者相对应(所以也可以理解为一种映射),将该实数记为 \(<\alpha, \beta>\),如果其满足如下性质:
- 对称性:\(<\alpha, \beta> = <\beta, \alpha>\)
- 可加性:\(<\alpha + \beta, \gamma> = <\alpha + \gamma, \beta + \gamma>, \gamma \in V\)
- 齐次性:\(<k \alpha, \beta> = k <\beta, \alpha>, k \in \mathbf{R}\)
- 正定性:\(<\alpha, \alpha> \ge 0\),且等号成立当且仅当 \(\alpha = 0\)
则称 \(<\alpha, \beta>\) 为这两个向量的内积,定义了内积的实线性空间称为欧式空间。
1.3.2. 酉空间
设 \(V\) 是 \(n\) 维复线性空间,如果 \(\forall \alpha, \beta \in V\),都有一个复数与二者相对应,将该复数记为 \(<\alpha, \beta>\),如果其满足如下性质:
- 共轭对称性:\(<\alpha, \beta> = \overline{<\beta, \alpha>}\),上横线表示共轭
- 可加性:\(<\alpha + \beta, \gamma> = <\alpha + \gamma, \beta + \gamma>, \gamma \in V\)
- 齐次性:\(<k \alpha, \beta> = k <\beta, \alpha>, k \in \mathbf{C}\)
- 正定性:\(<\alpha, \alpha> \ge 0\),且等号成立当且仅当 \(\alpha = 0\)
则称 \(<\alpha, \beta>\) 为这两个向量的内积,定义了内积的复线性空间称为酉空间。
1.3.3. Schmidt 正交化
以向量组 \(\{\alpha_1, \alpha_2, \alpha_3 \}\) 为例,对其进行施密特正交化得到标准正交基 \(\{\gamma_1, \gamma_2, \gamma_3\}\):
1.4. 特殊矩阵及性质
1.4.1. 共轭转置矩阵
对矩阵 \(A\) 中的每个元素取共轭复数,再将该矩阵转置,得到的矩阵就是共轭转置矩阵,记作 \(A^H\)。
1.4.2. Hermite 矩阵
设矩阵 \(A \in \mathbf{C}^{n \times n}\),如果其满足如下条件,则称为自共轭矩阵,又叫 Hermite 矩阵、埃尔米特矩阵、厄米特矩阵(对应实矩阵中的实对称矩阵):
比如:
关于构造 Hermite 矩阵的两个手法:
- Hermite 矩阵:\(B = \frac{A + A^H}{2}\)
- 反 Hermite 矩阵(共轭转置加负号):\(D = \frac{A - A^H}{2}\)
显然有 \(B + D = A\),即任意方阵都可以表示为 Hermite 矩阵和反 Hermite 矩阵的和。特别的,Hermite 矩阵的特征值都是实数,反 Hermite 矩阵的特征值都是纯虚数或零(不包含实部)。
1.4.3. 酉矩阵
当矩阵 \(A\) 的逆矩阵为其共轭转置 \(A^H\)时,即如下等式成立时,称矩阵 \(A\) 为酉矩阵(对应实矩阵中的正交矩阵):
酉矩阵的性质:
- \(\Vert Ax \Vert = \Vert x \Vert\)
- 酉矩阵的乘积仍为酉矩阵
- 酉矩阵特征值的模均为 1(如果是实数,绝对值为 1;如果是虚数,则 \(\sqrt{a^2 + b^2} = 1\))。
1.4.4. \(\lambda\) 矩阵
矩阵中的每一项都是关于 \(\lambda\) 的多项式,即形如:
的矩阵被称为 \(\lambda\) 矩阵(也叫多项式矩阵),比如线代中的特征多项式矩阵 \(\lambda I - A\)。
1.4.5. 矩阵的谱半径
设 \(A \in \mathbf{C}^{n \times n}\),记 \(\rho(A) = \max\limits_i \ | \lambda_i |\) 为方阵 \(A\) 的谱半径,即最大的特征值绝对值。
1.4.5. 矩阵的奇异值
设 \(A \in \mathbf{C}^{m \times n}, rank \ A = r\),则矩阵 \(A^H A\) 的特征值 \(\lambda_1 \ge \lambda_2 \ge ... \ge \lambda_r > \lambda_{r+1} = ... = \lambda_n = 0\) 非负。取 \(\sigma_i = \sqrt{\lambda_i}, i = 1, ..., r\) 为矩阵 \(A\) 的正奇异值(其余均为 0)。显然 \(A\) 和 \(A^H\) 的奇异值相同。
1.4.6. 单纯矩阵
一个特征值的代数重数就是它在特征多项式中作为根出现的次数,几何重数就是它对应的特征空间的维数。对于任意矩阵的特征值,其几何重数都小于等于代数重数。如果矩阵每个特征值的几何重数与代数重数都相等,则称该矩阵为单纯矩阵。
一个矩阵是单纯矩阵的充要条件,就是其与对角阵相似。
1.4.7. 正规矩阵
如果矩阵 \(A \in \mathbf{C}^{n \times n}\) 满足 \(A A^H = A^H A\),则称 \(A\) 为正规矩阵,正规矩阵不一定是 Hermite 矩阵。
如果矩阵 \(A \in \mathbf{R}^{n \times n}\) 满足 \(A A^T = A^T A\),则称 \(A\) 为实正规矩阵,实正规矩阵不一定是实对称矩阵。
正规矩阵的性质,如果 \(A \in \mathbf{C}^{n \times n}\) 是正规矩阵:
- 存在酉矩阵 \(U\),使得 \(U^H A U\)(\(U^H A^H U\))为对角阵,且对角线元素为 \(A\) 的特征值(的共轭)
- \(A\) 是单纯矩阵
- 若 \(A x = \lambda_i x, x \ne 0\),则 \(A^H x = \overline{\lambda_i} x\)
1.5. Jordan 标准型
1.5.1. Jordan 矩阵
Jordan 块
形如下面的方阵(主对角线相同,主对角线的上一个元素都是 1,其余所有元素均为 0)被称为 Jordan 块,其中 \(\lambda \in \mathbf{C}\):
子 Jordan 矩阵
由多个 \(\lambda\) 相同的 Jordan 块组成的矩阵,形如:
Jordan 矩阵
由多个子 Jordan 矩阵组成的矩阵,形如:
从定义可以看出,Jordan 矩阵可以划分为多个 \(\lambda\) 不同的子 Jordan 矩阵,每个子 Jordan 矩阵又包含多个 \(\lambda\) 相同的 Jordan 块。
1.5.2. Jordan 标准型
定义
如果 \(n\) 阶方阵 \(A\) 相似于 Jordan 矩阵 \(J\),即存在 \(n\) 阶可逆矩阵 \(P\),使得:
则称 \(J\) 为矩阵 \(A\) 的 Jordan 标准型,称 \(P\) 为相似变换矩阵。
行列式因子
设 \(n\) 阶方阵 \(A\) 的特征矩阵 \(A(\lambda) = \lambda I - A\),所有非零的 \(k = 1, 2, ..., n\) 阶子式的首项系数为 1 的最大公因式称为 \(A\) 的 \(k\) 阶行列式因子,记为 \(D_k(\lambda)\)。
例如:
- 非零一阶子式:\(-1, \lambda - 2\),\(D_1(\lambda) = 1\)
- 非零二阶子式:\(-1, (\lambda - 2)^2\),\(D_2(\lambda) = 1\)
- 非零三阶子式:\(-1, (\lambda - 2)^3\),\(D_3(\lambda) = 1\)
- 非零四阶子式:\((\lambda - 2)^4\),\(D_4(\lambda) = (\lambda - 2)^4\)
不变因子
设 \(D_k(\lambda)\) 为 \(A\) 的各阶行列式因子,令 \(d_i(\lambda)\) 为 \(A\) 的不变因子:
Smith 标准型
通过初等行(列)变换,规则如下:
- 交换两行或两列
- 非零数乘某行或某列
- 某行或某列的 \(\phi(\lambda)\) 倍加到另一行或列
将 \(\lambda\) 矩阵化为如下对角阵,其中 \(rank \ A = r\),\(d_i(\lambda)\) 为首项系数为 1 的 \(\lambda\) 多项式:
对角线的非零元素,即为 \(A(\lambda)\) 的不变因子。
初等因子
将所有的不变因子,分解为互不相同的一次因式方幂,每个因式都是一个初等因子。
判断矩阵 Jordan 块的数目
通过特征值判断,(代数重数)一重特征值对应一阶 Jordan 块,k 重特征值有多少个无关的特征向量,就有多少个以其为对角元的 Jordan 块。
1.5.3. 求解 Jordan 标准型和变换矩阵
二、范数
2.1. 向量范数
2.1.1. 定义
向量范数是用来刻画向量大小的一种度量。形如:实数的绝对值、复数的模、三维空间向量的长度等,都是抽象的范数概念的原型。对于任意两个 \(n\) 维向量,我们不能直接去比较它们的大小,因为没有比较规则。通过定义某种向量范数(规则),可以将每个 \(n\) 维向量映射为一个实数,所以也可以将范数理解为一种映射(\(f: \mathbf{C}^n \rightarrow \mathbf{R}\))。不过范数通常不用 \(f(x)\) 来表示,它有专用符号 \(\Vert · \Vert\)。有些常用的范数,会加上右下角标,这是默认的约定,如向量2-范数(\(\Vert x \Vert_2\))。
在线性空间 \(\mathbf{C}^n\) 中,定义向量范数需要满足如下三条性质:
- 非负性:\(\Vert x \Vert \ge 0\),当且仅当 \(x = 0\) 等号成立,其中 \(x \in \mathbf{C}^n\)
- 齐次性:\(\Vert \lambda x \Vert = | \lambda | \cdot \Vert x \Vert\),其中 \(\lambda \in \mathbf{C}\)
- 三角不等式:\(\Vert x + y \Vert \le \Vert x \Vert + \Vert y \Vert\),其中 \(x, y \in \mathbf{C}^n\)
如果映射 \(\Vert · \Vert: \mathbf{C}^n \rightarrow \mathbf{R}\) 满足以上三条性质,则该映射称为 \(\mathbf{C}^n\) 中的向量范数。定义了范数的线性空间,称为赋范线性空间。
2.1.2. 常用的向量范数
Hölder 范数(p 范数)
注意 \(p\) 的范围,当 \(p \in (0, 1)\) 时得到的映射不满足三角不等式,所以不属于范数。
Hölder 不等式
若 \(p, q > 1\),且 \(\frac{1}{p} + \frac{1}{q} = 1\),则 \(\forall x, y \in \mathbf{C}^n\) 都有:
向量 1 范数
即 \(p\) 范数中,\(p = 1\) 的情况:
向量 2 范数
即 \(p\) 范数中,\(p = 2\) 的情况:
向量无穷范数
即 \(p\) 范数中,\(p \rightarrow +\infty\) 的情况:
从上面可以看出,范数指标越高(一范数、二范数、...、无穷范数),它就越关注向量中的大值而忽略小值。
2.2. 矩阵范数
2.2.1. 定义
设矩阵 \(A, B \in \mathbf{C}^{m \times n}\),如果映射 \(\Vert · \Vert\) 满足:
- 非负性:\(\Vert A \Vert \ge 0\),当且仅当 \(A\) 为零矩阵时等号成立
- 齐次性:\(\Vert \lambda A \Vert = | \lambda | \cdot \Vert A \Vert\),其中 \(\lambda \in \mathbf{C}\)
- 三角不等式:\(\Vert A + B \Vert \le \Vert A \Vert + \Vert B \Vert\)
- 相容性:\(\Vert A B \Vert \le \Vert A \Vert \cdot \Vert B \Vert\)
满足前三条,则称该映射为 \(\mathbf{C}^{m \times n}\) 上的范数。有些书上定义的矩阵范数是对于 \(n\) 阶方阵的,这种定义往往要求矩阵满足相容性,即上述第四条。
2.2.2. 算子范数
是一类矩阵范数而非一种。设 \(\Vert · \Vert_a\) 为 \(\mathbf{C}^n\) 上的向量范数,\(A \in \mathbf{C}^{n \times n}\),定义映射 \(\Vert · \Vert_m\) 如下:
则该映射称为 \(\mathbf{C}^{n \times n}\) 上,由向量范数 \(\Vert · \Vert_a\) 诱导的算子范数(也叫诱导范数)。算子范数有如下性质:
- 算子范数是矩阵范数,且必与该向量范数相容,即 \(\Vert A x \Vert_a \le \Vert A \Vert_m \cdot \Vert x \Vert_a\)
- 相容的矩阵范数(算子范数就属于)满足 \(\Vert A \Vert_m \ge | \lambda_i |\),其中 \(\lambda_i\) 为 \(A\) 的特征值
- 设 \(A \in \mathbf{C}^{n \times n}\),\(\Vert A \Vert_{a}\) 为从属于向量范数 \(\Vert x \Vert_a\) 的算子范数,则当 \(\Vert A \Vert_a < 1\) 时 \(E-A\) 可逆,且 \(\Vert (E-A)^{-1} \Vert_a \le (1 - \Vert A \Vert_a)^{-1}\)
2.2.3. 常用的矩阵范数
矩阵 1 范数
矩阵 2 范数(F-范数)
F-范数的性质:
- 记作 \(\Vert A \Vert_{m_2}\) 或者 \(\Vert A \Vert_{F}\),二者等价
- \(\Vert A \Vert_{m_2}^2 = tr(A^H A) = \sum_{i=1}^n \lambda_i (A^H A) = \sum_{i=1}^n \lambda_i^2 (A)\)
- 对于任意酉矩阵 \(U, V\),均有 \(\Vert U A V \Vert_{m_2} = \Vert U A \Vert_{m_2} = \Vert A V \Vert_{m_2} = \Vert A \Vert_{m_2} = \Vert U^H A V \Vert_{m_2} = \Vert U A V^H \Vert_{m_2}\)
- 设矩阵 \(A \in \mathbf{C}^{m \times n}, rank \ A = r\) 的正奇异值为 \(\sigma_1, ..., \sigma_r\),则 \(\Vert A \Vert_{m_2} = (\sum_{i=1}^r \sigma_i^2)^{1/2}\)
矩阵无穷范数
矩阵的无穷范数与 \(\Vert x \Vert_{\infty}\) 不相容,除这个外,其余几个范数都与对应的向量范数相容。
从属于向量 1 范数的算子范数(列和范数,即最大列和)
从属于向量 2 范数的算子范数(谱范数)
谱范数的性质:
- \(\Vert A \Vert_2 = \Vert A^H \Vert_2 = \Vert A^T \Vert_2 = \Vert \overline{A} \Vert_2\)
- \(\Vert A^H A \Vert_2 = \Vert A A^H \Vert_2 = \Vert A \Vert_2^2\)
- 对于任意酉矩阵 \(U, V\),均有 \(\Vert U A V \Vert_2 = \Vert U A \Vert_2 = \Vert A V \Vert_2 = \Vert A \Vert_2\)
- \(\Vert A \Vert_2^2 \le \Vert A \Vert_1 \Vert \cdot A \Vert_\infty\)
- 设矩阵 \(A \in \mathbf{C}^{m \times n}, rank \ A = r\) 的正奇异值为 \(\sigma_1, ..., \sigma_r\),则 \(\Vert A \Vert_{2} = \max_i \sigma_i\)
从属于向量无穷范数的算子范数(行和范数,即最大行和)
2.2.4. 酉不变范数
定义
是一类矩阵范数而非一种。设 \(U\) 为任意 \(n\) 阶酉矩阵,\(A \in \mathbf{C}^{m \times n}\),如果映射 \(\Vert · \Vert: \mathbf{C}^{m \times n} \rightarrow \mathbf{R}\) 满足:
- 非负性:\(\Vert A \Vert \ge 0\),当且仅当 \(A\) 为零矩阵时等号成立
- 齐次性:\(\Vert \lambda A \Vert = | \lambda | \cdot \Vert A \Vert\),\(\forall \lambda \in \mathbf{C}\)
- 三角不等式:\(\Vert A + B \Vert \le \Vert A \Vert + \Vert B \Vert\),\(\forall A, B \in \mathbf{C}^{m \times n}\)
- 酉不变性:\(\Vert U A V \Vert = \Vert A \Vert\),对任意 \(m, n\) 阶酉矩阵 \(U, V\) 均成立
- 如果 \(rank \ A = 1\),则 \(\Vert U A V \Vert = \Vert A \Vert_2\),即酉不变范数等于谱范数
常见范数分类
- \(\Vert A \Vert_2\)(谱范数)是酉不变范数
- \(\Vert A \Vert_{m_2} \Leftrightarrow \Vert A \Vert_F\)(F 范数)是酉不变范数
- \(\Vert A \Vert_1, \Vert A \Vert_{\infty}\) 不是酉不变范数
三、矩阵分解
3.1. 三角分解
矩阵的三角分解,将矩阵分解为一个酉矩阵(或者正交矩阵,如果是实矩阵分解的话)和一个三角矩阵的乘积
3.1.1. LR 分解
若矩阵 \(A\) 为满秩复方阵,则可唯一分解为:
- \(A = LR\),其中 \(L\) 是单位下三角复矩阵,\(R\) 是上三角复矩阵
- \(A = LR\),其中 \(L\) 是下三角复矩阵,\(R\) 是单位上三角复矩阵
- \(A = LDR\),其中 \(L\) 是单位下三角复矩阵,\(R\) 是单位上三角复矩阵,\(D\) 是对角矩阵
特别的:
- 满秩方阵才有 \(LR\)(以及其它两种)分解式
- 分解式是唯一的
- 对正线上(下)三角矩阵施加酉变换(U 矩阵)可以得到满秩矩阵(原矩阵)
3.1.2. QR 分解
若矩阵 \(A\) 为满秩实方阵,则可唯一分解为 \(A = LQ\),其中 \(L\) 是正线下三角实矩阵,\(Q\) 是正交矩阵。同样的,\(A\) 可唯一分解为 \(A = QR\),其中 \(R\) 是正线上三角实矩阵,\(Q\) 是正交矩阵。
3.2. 谱分解
3.2.1. 单纯矩阵的谱分解
设 \(A \in \mathbf{C}^{n \times n}\) 为单纯矩阵,则 \(A\) 可分解为一系列幂等矩阵的加权和(\(\lambda_i\) 为 \(A\) 的特征值),即:
其推导过程如下:
3.2.1. 正规矩阵的谱分解
Schur 引理
设 \(A \in \mathbf{C}^{n \times n}\),则存在酉矩阵 \(U\),使得 \(A = U R U^H\),其中 \(R\) 为上三角矩阵,且主对角线元素为 \(A\) 的特征值。
正规矩阵的谱分解
设 \(A \in \mathbf{C}^{n \times n}\) 为正规矩阵,则存在酉矩阵 \(U\),使得:
特别的,\(A\) 可酉相似对角化,是 \(A\) 为正规矩阵的充要条件。
3.3. 奇异值分解
设矩阵 \(A \in \mathbf{C}^{m \times n}_r\)(下标为矩阵的秩),\(\sigma_1, ..., \sigma_r\) 为其 r 个正奇异值,则存在酉矩阵 \(U \in \mathbf{C}^{m \times m}, V \in \mathbf{C}^{n \times n}\) 以及矩阵 \(\Sigma \in \mathbf{C}^{m \times n}\),使得:
其中 \(V\) 为 \(A^H A\) 的单位正交的特征向量矩阵,\(V_1\) 为 \(V\) 的前 r 列,\(V_1\) 为 \(V\) 的剩余列。\(U_1 = A V_1 \Sigma^{-1}\),\(U_2\) 为构造矩阵,其每一列都与 \(U_1\) 中的任一列向量正交。
3.4. 满秩分解
设矩阵 \(A \in \mathbf{C}^{m \times n}_r\),则存在矩阵 \(B \in \mathbf{C}^{m \times r}, D \in \mathbf{C}^{r \times n}\) 使得:
其中矩阵 \(D\) 为原矩阵行最简形式的前 r 行,矩阵 \(B\) 为原矩阵行最简形式中,组成单位阵 \(E_r\) 的列号,在原矩阵中对应的列。
四、特征值的估计与摄动
4.1. 特征值界估计
设矩阵 \(A \in \mathbf{C}^{n \times n}\),令矩阵 \(B = \frac{A + A^H}{2}, C = \frac{A - A^H}{2}\),则 \(B, C\) 为 Hermite 矩阵(特征值均为实数)和反 Hermite 矩阵(特征值均为纯虚数)。令 \(A, B, C\) 的特征值集合为 \(\{\lambda_1, ..., \lambda_n \}, \{\mu_1, ..., \mu_n \}, \{i\gamma_1, ..., i\gamma_n \}\),且均按照由大到小的顺序排序。
令 \(Re(\lambda_i)\) 表示 \(\lambda_i\) 的实部,\(Im(\lambda_i)\) 表示 \(\lambda_i\) 的虚部。
Schur 不等式(舒尔)
设矩阵 \(A \in \mathbf{C}^{n \times n}\) 的特征值为 \(\lambda_1, ..., \lambda_n\)。则有关于特征值的范围的不等式:
等号成立,当且仅当 \(A\) 为正规矩阵,即 \(A A^H = A^H A\)。
Hadamard 不等式(哈达玛)
设矩阵 \(A \in \mathbf{C}^{n \times n} = (\alpha_1, ..., \alpha_n)\) 的特征值为 \(\lambda_1, ..., \lambda_n\),则有关于行列式的范围的不等式:
等号成立,当且仅当 \(A\) 的某一列全为零元。
定理
4.2. 盖尔圆盘定理
盖尔圆
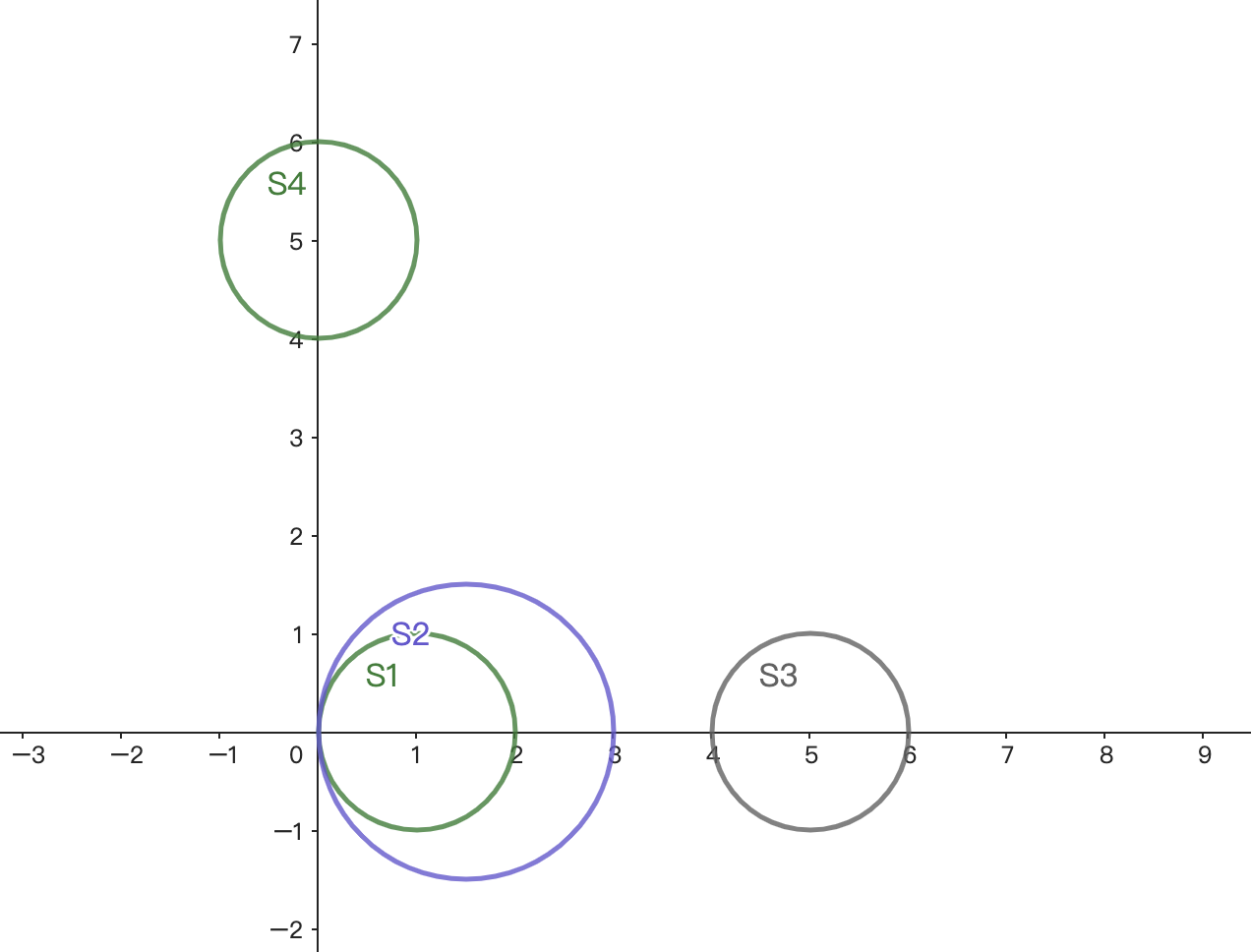
- 行盖尔圆:\(S_i = \{ z \in \mathbf{C} \ | \ | z - a_{ii} | \le R_i = \sum_{j \ne i} |a_{ij}| \}\)
- 列盖尔圆:\(G_j = \{ z \in \mathbf{C} \ | \ | z - a_{jj} | \le C_j = \sum_{i \ne j} |a_{ij}| \}\)
通俗的说:
- \(S_i\) 表示第 \(i\) 行对应的行盖尔圆,是一个点集,集合中每个元素距离圆心(该行对角元)的距离,不超过 \(R_i\)(去掉该行对角元的所有元素绝对值的和)。
- \(G_j\) 表示第 \(j\) 列对应的列盖尔圆,是一个点集,集合中每个元素距离圆心(该列对角元)的距离,不超过 \(C_j\)(去掉该列对角元的所有元素绝对值的和)。
盖尔圆盘定理
设矩阵 \(A \in \mathbf{C}^{n \times n}\),则其任一特征值均满足:
也就是说,任意一个特征值,均落在其行盖尔圆的集合内。对列盖尔圆也有相同结论。
盖尔圆盘定理推广
如果 \(n\) 阶方阵的 \(n\) 个行盖尔圆中有 \(k\) 个盖尔圆的并集形成一个连通区域(只要存在一个交点就算),则在这个连通区域中恰有 \(k\) 个特征值。对列盖尔圆也有相同结论。
五、矩阵分析
5.1. 矩阵函数的求法
-
求出矩阵的 Jordan 标准型及变换矩阵
-
按照如下公式对每个 Jordan 块 \(J_i\) 计算 \(f(J_i)\),其中 \(m_i\) 表示该 Jordan 块的阶数
- 将 \(f(J_i)\) 按顺序排列,合成 \(f(J)\)
- 按照 \(f(A) = P f(J) P^{-1}\) 计算矩阵函数
六、广义逆矩阵
6.1. M-P 广义逆矩阵
定义
设矩阵 \(A \in \mathbf{C}^{n \times n}\),如果存在矩阵 \(G\) 满足:
- \(AGA = A\)
- \(GAG = G\)
- \((GA)^H= GA\)
- \((AG)^H = AG\)
则称 \(G\) 为 \(A\) 的 M-P 广义逆矩阵,记作 \(A^+\)。
性质
- \((A^+)^+ = A\)
- \((A^H)^+ = (A^+)^H\)
- \(A^+ = (A^H A)^+ A^H = A^H (A^H A)^+\)
- \(R(A^+) = R(A^H), N(A^+) = N(A^H)\)
- \((A^H A)^+ = A^+ (A^H)^+\)
- \((A^2)^+ = (A^+)^2 \Leftrightarrow A\) 为 Hermite 矩阵
通过满秩分解计算
根据矩阵满秩分解,我们有 \(A = BD\),则矩阵 \(A\) 的 M-P 广义逆矩阵可表示为:
方程的解
- 线性齐次方程组:\(Ax = b\) 有解的充要条件为 \(A A^+ b = b\),有解时的通解为 \(x = A^+ b +(I_n - A^+ A) y, \forall y \in \mathbf{C}^n\)
- 最小二乘解:通解形式为 \(x = A^+b +(I_n - A^+ A) y\)
- 最佳逼近解:\(x = A^+ b\)
