1-1. 凸优化(笔记)
Course:电子科技大学 - 最优化理论
Textbook:《凸优化》- Stephen Boyd
ISBN:9787302297567
一、引言
1.1. 数学优化
1.1.1. 优化问题
数学优化问题指可以写成如下形式的问题:
其中,各个变量及符号的含义如下:
- \(x \in \bf{R^n}\):优化变量
- \(f_0(x): \bf{R^n} \rightarrow \bf{R}\):目标函数
- \(f_i(x): \bf{R^n} \rightarrow \bf{R}\):约束函数
- \(b_i\):约束上限或者约束边界
- \(x^*\):称为最优解或者解,即对于任意满足所有约束函数的优化变量取值中,使得目标函数值最小的那个优化变量取值
1.1.2. 线性规划问题
一般只考虑具有特殊形式的优化问题,如目标函数和约束函数都为线性函数,此类问题称为线性规划。其目标函数和约束函数满足如下性质:
1.1.3. 凸优化问题
凸优化问题也是一种具有特殊形式的优化问题,是本课程讨论的主要对象,且线性规划也属于一种特殊的凸优化问题。凸优化问题的目标函数和约束函数满足如下性质:
1.2. 优化问题求解
1.2.1. 最小二乘问题
最小二乘问题是一个典型的无约束函数的凸优化问题(\(m = 0\)),其具体形式如下:
其中 \(A \in \bf{R^{k \times n}} (k \ge n)\),\(a_i^T\) 是 \(A\) 的行向量,\(x \in \bf{R^n}\) 是优化变量。
最小二乘问题常用于回归分析,最优控制,参数估计以及数据拟合等。求解最小二乘问题一般是一项成熟的技术,其有通用方法,即将其转换为一组线性方程并求出 \(x\) 的解析式:
判断一个问题是否是最小二乘问题
验证其目标函数是否是二次函数,并检验该二次函数是否半正定。此外加权系数以及正则化参数都是最小二乘问题的扩展,这些参数可以使最小二乘问题更加贴合实际应用。
1.2.2. 线性规划问题
相比于最小二乘,虽然线性规划问题的解没有一个简单的解析式,但也存在很多有效的求解方法,如 Dantzig 单纯形法,内点法。使用小型台式机可在几秒的时间内处理数百变量,数千约束条件的线性规划问题。求解程序已经嵌入到了很多工具箱或者程序包中。
1.2.3. 凸优化问题
凸优化问题的解也没有一个简单的解析式,但是内点法求解在实际应用中就很有效。一些情况下,内点法可以在多项式时间内以给定精度求解这些凸优化问题。
从概念上看,使用凸优化和使用最小二乘及线性规划类似。将某个应用问题表述为凸优化问题,即可快速有效的进行求解。但凸优化问题的识别比较困难,且转换为凸优化问题的过程中存在更多技巧。如果能将一个问题表述为凸优化问题,那么求解它几乎只是一项有套路的技术了。
1.2.4. 非线性优化
非线性优化,其目标函数或约束函数为非线性函数,当然也不一定是凸函数。对于一般的非线性规划问题,还没有比较好的求解方案。一般对于此类问题,都是放宽某些限制,采取不同的途径进行求解。
- 局部优化:放宽对解的最优性的要求,不再寻找全局最优解,改为寻找局部最优解。这种方法需要估计优化变量的初值,其对优化结果往往影响很大,且这是一项比较困难且没有保障性的工作,需要更多的技巧
- 全局优化:付出效率的代价寻找全局最优解,一般问题规模较小且求解时间比较长
- 非凸问题中的凸优化应用:局部优化结合凸优化技术、非凸优化中的凸启发式算法、全局优化的界
1.3. 符号
- \(R, R_+, R_{++}\):实数集,非负实数集,正实数集
- \(C\):复数集
- \(R^{n}\):n 维实向量
- \(R^{m \times n}\):\(m \times n\) 实矩阵
- \(S^n, S^n_{+}, S^n_{++}\):对称 \(n \times n\) 矩阵,对称半正定 \(n \times n\) 矩阵,对称正定 \(n \times n\) 矩阵
- \(I\):单位阵
- \(\lambda_i\):第 \(i\) 大特征值
- \(\sigma_i\):第 \(i\) 大奇异值
1.4 章节分类
- 1 ~ 5:理论
- 6 ~ 8:应用
- 9 ~ 11:算法
二、凸集
2.1. 仿射集合,凸集和锥
2.1.1. 仿射集
仿射集
对于集合 \(C \in \bf{R^n}\),连接其中任意两个不同点所成的直线,仍在该集合中,那么称集合 \(C\) 是仿射的。数学公式表述为:
其中,满足条件的 \(\theta_i\) 和 \(x_i\) 的线性组合:\(\theta_1 x_1 + ... + \theta_k x_k\) 称为集合 \(C\) 的仿射组合
仿射包
称由集合 $ C \in \mathbf{R^n} $ 的所有仿射组合,组成的集合称为仿射包,记为 $ \mathbf{aff} \ C$:
2.1.2. 凸集
凸集
对于集合 \(C \in \bf{R^n}\),连接其中任意两个不同点所成的线段,仍在该集合中,那么称集合 \(C\) 是凸的。数学公式表述为:
其中,满足条件的 \(\theta_i\) 和 \(x_i\) 的线性组合:\(\theta_1 x_1 + ... + \theta_k x_k\) 称为集合 \(C\) 的凸组合
凸包
称由集合 $ C \in \mathbf{R^n} $ 的所有凸组合,组成的集合称为凸包,记为 $ \mathbf{conv} \ C$:
2.1.3. 锥
锥
对于集合 \(C \in \bf{R^n}\),从其顶点到其中任意点的射线,仍在该集合中,那么称集合 \(C\) 是一个锥。数学公式表述为:
凸锥
如果集合 \(C \in \bf{R^n}\) 是锥且是凸集,则称其为凸锥,如下图。数学公式表述为:
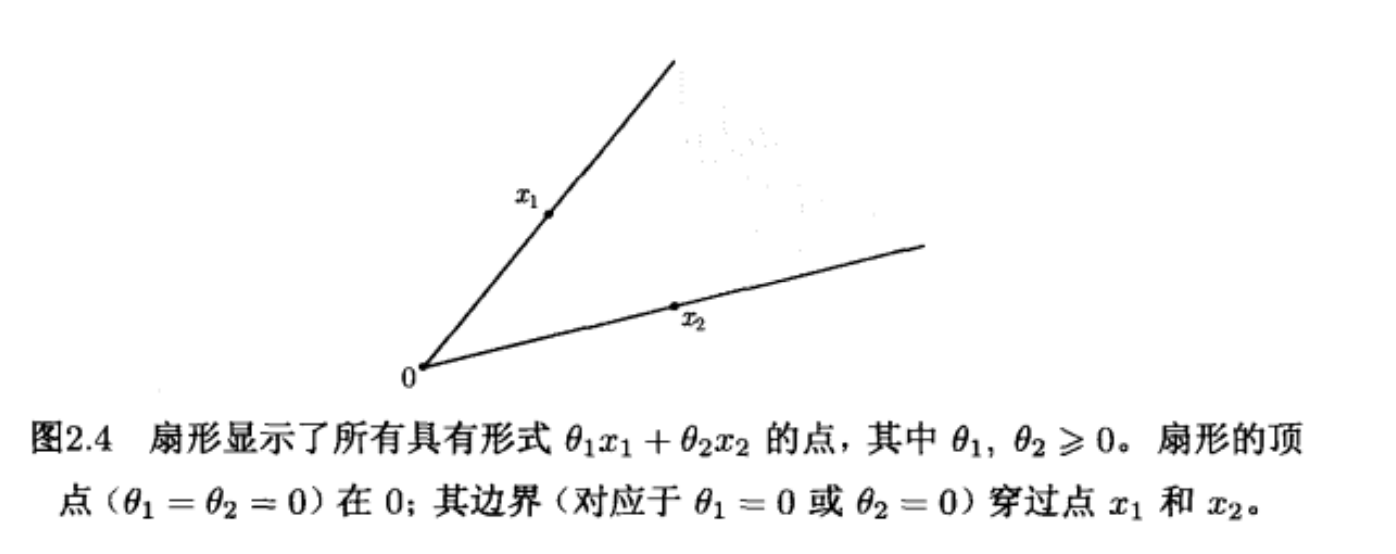
锥组合
其中,满足条件的 \(\theta_i\) 和 \(x_i\) 的线性组合:\(\theta_1 x_1 + ... + \theta_k x_k\) 称为集合 \(C\) 的锥组合
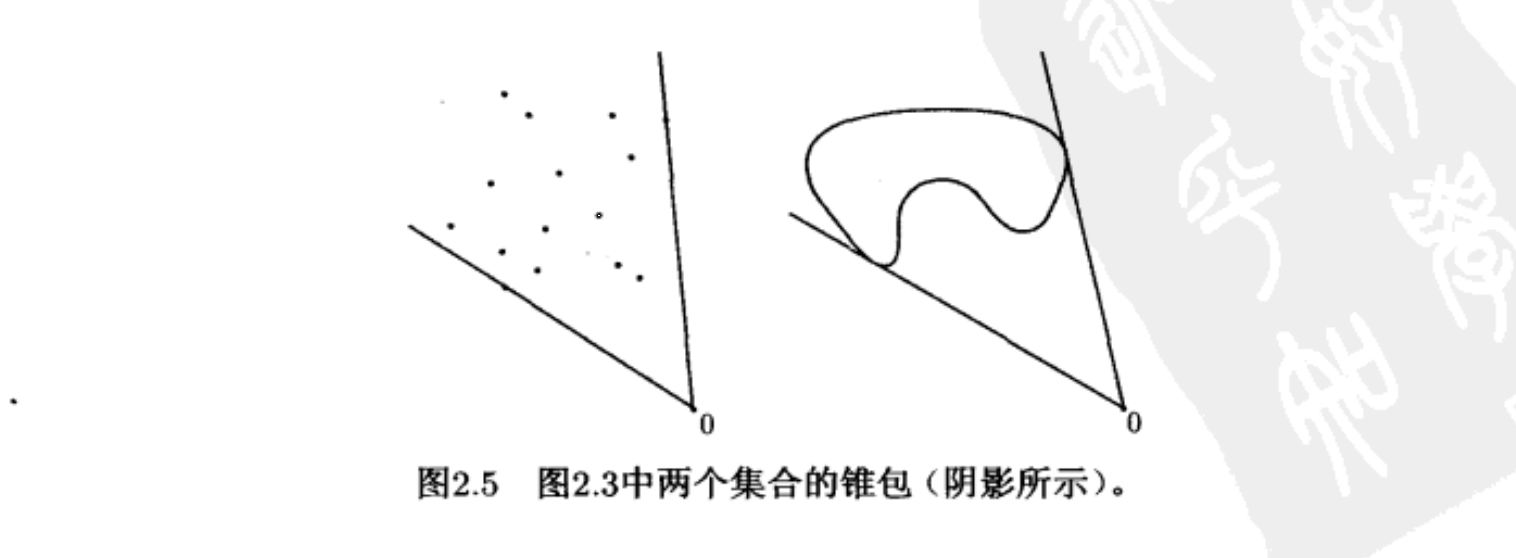
锥包
称由集合 \(C \in \bf{R^n}\) 的所有锥组合,组成的集合称为锥包。数学公式表述为:
2.2. 重要的例子
2.2.1. 简单的例子
- \(\emptyset, {x_1}, R^n\):空集、单点集、全空间都是仿射且凸的
- 任意直线都是仿射的
- 任意通过零点的直线都是子空间,也是凸锥
- 任意一条线段是凸的,但不是仿射的
- 任意子空间都是仿射的,凸的且凸锥
2.2.2. 超平面
形如 $ \{ x \ | \ a^T x = b, a \in \mathbf{R^n} , a \neq 0, b \in \mathbf{R^n} \}$ 组成的点集称为超平面。在二维空间中可以想象为一条直线,三维空间为一个平面。
2.2.3. 半空间
一个超平面将全空间分为两个半空间,分别表示为:
半空间的边界 \(\{x \ | \ a^T x = b \}\) 为超平面,内部如 \(\{x \ | \ a^T x < b \}\) 称为开半空间。
2.2.4. Euclid 球和椭球
\(\mathbf{R^n}\) 中的 Euclid 球(简称为球),具有以下形式:
其中标量 \(r > 0\) 表示球的半径,\(\Vert · \Vert_2\) 为 Euclid 范数(欧几里得范数),向量 \(x_c\) 表示球心,\(B(x_c, r)\) 表示距离球心不超过 \(r\) 的所有点组成的集合。显然,球是凸集。
\(\mathbf{R^n}\) 中的椭球,具有以下形式:
其中 \(P = P^T \succ 0\),即 \(P\) 为对称正定矩阵。向量 \(x_c\) 表示椭球的球心,矩阵 \(P\) 决定了椭球从球心向各个方向扩展的幅度。椭球的半轴长度由矩阵 \(P\) 的特征值 \(\sqrt{\lambda_i}\) 决定。球可以看做 \(P = r^2 I\) 的椭球。同样的,椭球也是凸集。
2.2.5. 范数球和范数锥
2.2.6. 多面体
多面体是有限个半空间和超平面的交集,具有以下形式:
仿射集合(子空间、超平面、直线),射线,线段和半空间都是多面体。显然,多面体也是凸集。有界的多面体也称为多胞形。
2.3. 保凸运算
2.3.1. 交集
交集运算是保凸的,如果 \(S_1, S_2\) 均为凸集,则 \(S_1 \cap S_2\) 也是凸集。这个性质可以扩展到无穷个集合的交。比如多面体是半空间和超平面的交集,因此它是凸的。
2.3.2. 仿射函数
对于仿射函数 \(f: \mathbf{R^m} \rightarrow \mathbf{R^n}\),如果其具有如下形式:\(f(x) = A x + b, \ A \in \mathbf{R^{m \times n}}, \ b \in \mathbf{R^m}\),那么该函数是保凸的。即如果原象 \(S \in \mathbf{R^n}\) 是凸的,那么 \(S\) 在 \(f\) 下的象 \(f(S) = \{ f(x) \ | \ x \in S \}\)也是凸的。下面是仿射函数的一些简单应用:
伸缩
如果 \(S \in \mathbf{R^n}\) 是凸集,\(\alpha \in \mathbf{R}\),那么集合 \(\alpha S = \{ \alpha x \ | \ x \in S \}\) 是凸的。
平移
如果 \(S \in \mathbf{R^n}\) 是凸集,\(a \in \mathbf{R^n}\),那么集合 \(a + S = \{ a + x \ | \ x \in S \}\) 是凸的。
集合的和
如果 \(S_1, S_2\) 是凸集,那么集合 \(S_1 + S_2 = \{ x_1 + x_2 \ | \ x_1 \in S_1, \ x_2 \in S_2 \}\) 是凸集。
集合的直积/Cartesian 乘积
如果 \(S_1, S_2\) 是凸集,那么集合 \(S_1 \times S_2 = \{ (x_1, x_2) \ | \ x_1 \in S_1, \ x_2 \in S_2 \}\) 是凸集。
集合的部分和
如果 \(S_1, S_2\) 是凸集,那么集合 \(S = \{ (x, y_1 + y_2) \ | \ (x, y_1) \in S_1, \ (x, y_2) \in S_2 \}\) 是凸集。
2.3.3. 透视函数
定义 \(P: \mathbf{R^{n+1}} \rightarrow \mathbf{R^{n}}\),\(P(\mathbf{Z}, t) = \mathbf{Z} / t\),其定义域为 \(\mathbf{dom} P = \mathbf{R^{n}} \times \mathbf{R_{++}}\),即 \(Z \in \mathbf{R^{n}}, t \in \mathbf{R_{++}}\)。透视函数将向量规范化,使得最后一维化为 1 并舍弃之。
对于任意的集合 \(C \in \mathbf{dom} P\) 为凸集,则 \(P(C)\) 是凸的。逆命题同样成立。
2.3.4. 线性分式函数
线性分式函数是由透视函数和仿射函数复合而成的函数。即若 \(g(x)\) 为仿射函数,则 \(P(g(x))\) 称为线性分式函数。形如:
解释
我们可以将线性分式函数表示为一个矩阵左乘 \((x, 1)\),即:
然后将所得结果做归一化处理,使得最后一个分量变为 1,即 \(\begin{pmatrix} \frac{(Ax+b)}{(c^T x+d)} \\ 1 \end{pmatrix}\)。
三、凸函数
3.1. 定义与性质
3.1.1. 定义
定义一
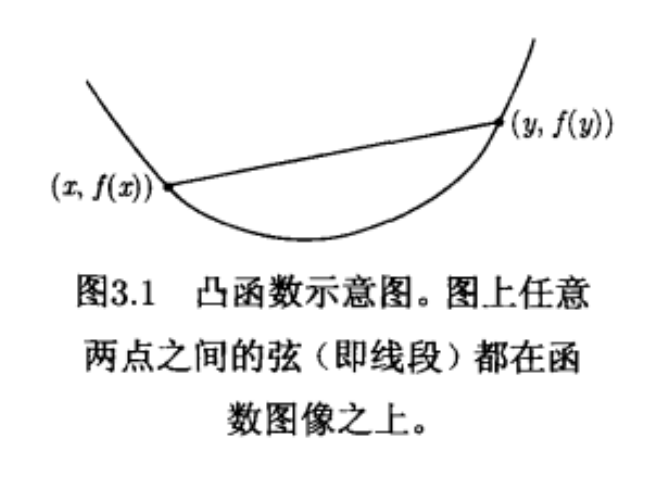
如果 \(\mathbf{dom} f\) 是凸集,且对于 \(\forall x, y \in \mathbf{dom} f, 0 \le \theta \le 1\),均有 $ f(\theta x + (1 - \theta) y) \le \theta f(x) + (1 - \theta) f(y) $ 成立,则称函数 \(f: \mathbf{R^n} \rightarrow \mathbf{R}\) 是凸的。
从几何意义上看,这个不等式意味着 \((x, f(x)), (y, f(y))\) 之间的弦,在函数 \(f\) 图像的上方:
- \(f\) 严格凸:当 \(x \ne y, 0 < \theta < 1\) 时,不等式严格成立
- \(f\) 凹:函数 \(-f\) 是凸的
- \(f\) 严格凹:函数 \(-f\) 是严格凸的
对于仿射函数,该不等式总是成立,因此所有的仿射函数都是既凸又凹的。即:一个函数既凸又凹 \(\Leftrightarrow\) 该函数为仿射函数。
定义二
一个函数是凸的,当且仅当其在与其定义域相交的任何直线上都是凸的。换言之,函数 \(f\) 是凸的,当且仅当对于任意的 \(x \in \mathbf{dom} f\) 和任意的向量 \(v\),均有函数 \(g(t) = f(x + tv)\) 是凸的,其中 \(\mathbf{dom} g = \{ t \ | \ x + tv \in \mathbf{dom} f\}\)。
比如在 xoy 平面中的圆(包含其内部)为一个凸集,使用任意直线对其进行切割,得到的交集(空集、单点集、连接直线与圆两交点的线段)必定为凸集。再比如:
任选一点 $x = (0,0)$ 和向量 $v = (1,1)$,以及标量 $t$,那么 $x + vt$ 可以表示二维空间中,通过 $(0,0)$ 和 $(1,1)$ 的直线,即 $x = y$(注意此直线在三维空间中,表示一个空间平面)。 则 $x+vt = (0,0)^T + (t,t)^T = (t,t)^T$,$z = t^2 + t^2 = 2t^2$。即交线方程为 $z = 2t^2$,是一个开口向上的抛物线,显然是凸的。
如果对于任取的 $x, v$,得到的交线都是凸的,那么原函数 $A$ 是凸的。这里的任取,使得 $A$ 的所有 $n-1$ 维切割方式(无数种)都被遍历到。
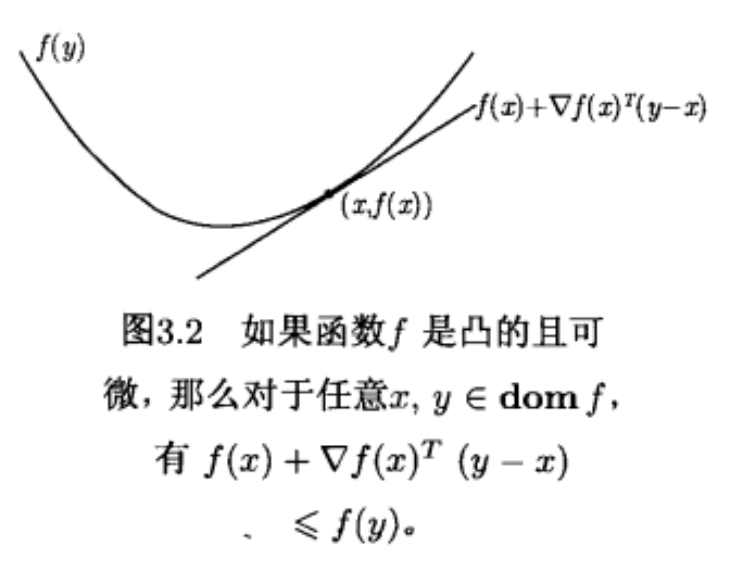
定义三(一阶条件)
假设 \(f\) 可微(即其梯度 \(\nabla f = (\frac{\partial f}{\partial x_1}, ..., \frac{\partial f}{\partial x_n})\) 在开集 \(\mathbf{dom} f\) 内处处存在),则函数 \(f(x)\) 是凸函数 \(\Leftrightarrow\) \(\mathbf{dom} f\) 是凸集,且 \(\forall x, y \in \mathbf{dom} f\) 均有如下不等式成立:
\[f(y) - f(x) \ge \nabla f(x)^T (y-x) \]
下图描述了该不等式的几何意义(函数图像在切线上方):
定义四(二阶条件)
假设 \(f\) 二阶可微(即对于开集 \(\mathbf{dom} f\) 内任意一点,其 \(Hessian\) 矩阵或者二阶导数 \(\nabla^2 f\) 存在)。则函数 \(f(x)\) 是凸函数 \(\Leftrightarrow\) \(\mathbf{dom} f\) 是凸集,且 \(\nabla^2 f(x) \succeq 0\)。 其中:
3.1.2. 约定及性质
扩展值延伸(定义域延伸)
通常可以将凸函数定义域外的取值定义为 \(\infty\),来将凸函数的定义延伸至全空间 \(\mathbf{R^n}\),得到的新函数我们记为:
凸集的示性函数
凸集 \(C\) 的示性函数 \(\tilde{I}_C(x)\) 仍是一个凸集,其被定义为:
定义域限制
在判断函数的凹性和凸性时,不管是一阶条件还是二阶条件,\(\mathbf{dom} f\) 是凸集这个前提条件必须满足。
3.2. 重要的例子
3.2.1. 简单的例子
下面的示例是定义在 \(\mathbf{R}\) 上的一些函数,其自变量为标量 \(x\):
- 指数函数:\(\forall a \in \mathbf{R}\),函数 \(e^{ax}\) 在 \(\mathbf{R}\) 上是凸的
- 幂函数:当 $a \ge 1 $ 或 \(a \le 0\) 时,函数 \(x^a\) 在 \(\mathbf{R_{++}}\) 上是凸的;当 \(0 \le a \le 1\) 时,函数 \(x^a\) 在 \(\mathbf{R_{++}}\) 上是凹的
- 绝对值幂函数:当 \(p \ge 1\) 时,函数 \(|x|^p\) 在 \(\mathbf{R}\) 时凸的
- 对数函数:函数 \(\log x\) 在 \(\mathbf{R_{++}}\) 上是凹的
- 负熵:函数 \(x \log x\) 在定义域(可定义 \(f(0) = 0\))上是凸的
下面的示例是定义在 \(\mathbf{R^n}\) 上的一些函数,其自变量为 \(x \in \mathbf{R^n}\):
- 范数:\(\mathbf{R^n}\) 上的任意范数均为凸函数
- 最大值函数:函数 \(f(x) = \max \{ x_1, ..., x_n\}\) 在 \(\mathbf{R^n}\) 上是凸的
- 二次-线性分式函数:函数 \(f(x,y) = \frac{x^2}{y}\) 是凸函数,其定义域为 \(\mathbf{dom} f = \mathbf{R} \times \mathbf{R_{++}}\)
- 指数和的对数:函数 \(f(x) = \log (e^{x_1} + ... + e^{x_n})\) 在 \(\mathbf{R^n}\) 上是凸的,这个函数可以看成最大值函数的解析近似
- 几何平均:函数 \(f(x) = (x_1 \cdot x_2 \cdot ... \cdot x_n)^{1/n}\) 在定义域 \(\mathbf{dom} f \in \mathbf{R^n_{++}}\) 上是凹函数
- 对数-行列式:函数 \(f(X) = \log \det X\) 在定义域 \(\mathbf{dom} f \in \mathbf{S^n_{++}}\) 上是凹函数
3.2.2. 下水平集
函数 \(f: \mathbf{R^n} \rightarrow \mathbf{R}\) 的 \(\alpha\) 下水平集,被定义为 \(C_\alpha = \{ x \in \mathbf{dom} f \ | \ f(x) \le \alpha \}\)。注意,下水平集是定义域的子集,不要理解为函数图像的一部分。
凸函数的任意 \(\alpha\) 下水平集都是凸集,反之则不一定。例如 \(f(x) = -e^x\) 不是凸函数,但其所有下水平集都是凸集。当然,如果 \(f\) 是凹函数,那么它的 \(\alpha\) 上水平集 \(\{ x \in \mathbf{dom} f \ | \ f(x) \ge \alpha \}\) 也是凸集。那么我们有如下结论:如果一个集合是某个凸函数的下水平集或者凹函数的上水平集,那么该集合一定是凸集。
通俗的讲,以 \(f: y = x^2\) 为例,划一条线 \(y = \alpha\),则使得 \(y \le \alpha\) 的所有 \(x\) 组成的集合,就是 \(f\) 的 \(\alpha\) 下水平集。
3.2.3. 上境图
函数 \(f: \mathbf{R^n} \rightarrow \mathbf{R}\) 的上境图,被定义为 \(\mathbf{epi} f = \{ (x, t) \ | \ x \in \mathbf{dom} f, f(x) \le t \}\)。可以将其理解为由 \(f(x)\) 图像上方的点所组成的集合。它是 \(\mathbf{R^{n+1}}\) 空间的一个子集(这里不用疑惑,函数维度和空间维度本就不一致,比如二维空间的函数图像其自变量为一维)。
一个函数是凸函数,当且仅当其上境图是凸集。一个函数是凹函数,当且仅当其亚图 \(\mathbf{hypo } f = \{ (x, t) \ | \ x \in \mathbf{dom} f, f(x) \ge t \}\) 是凸集。
通俗的讲,以 \(f: y = x^2\) 为例,则图像上方的全部区域,就是 \(f\) 的上境图。对应概念亚图,就是图像下方的全部区域。当然二者都是包含边界的。
3.3. 保凸运算
3.3.1. 非负加权和
如果函数 \(f\) 是凸函数,且标量 \(\alpha \ge 0\),则 \(\alpha f\) 也是凸函数。如果函数 \(f_1, f_2\) 均是凸函数,则 \(f_1 + f_2\) 也是凸函数。将凸函数的非负伸缩和求和运算结合起来,得到的函数仍然是凸函数。类似的结论有:
- 凸函数的非负加权求和仍为凸函数
- 凹函数的非负加权求和仍为凹函数
- 严格凸(凹)函数的非负、非零加权求和仍为严格凸(凹)函数
3.3.2. 复合仿射映射
设函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}, A \in \mathbf{R}^{n \times m}, b \in \mathbf{R}^n\),定义函数 \(g: \mathbf{R}^m \rightarrow \mathbf{R}\):
其中 \(\mathbf{dom} g = \{x \ | \ Ax+b \in \mathbf{dom} f\}\)。若 \(f\) 为凸(凹)函数,则 \(g\) 同为凸(凹)函数。
3.3.3. 逐点最大函数(有限个函数的最大值函数)
若 \(f_1(x), ..., f_m(x)\) 为凸函数,则 \(f(x) = \max \{ f_1(x), ..., f_m(x) \}\) 也是凸函数,其中 \(\mathbf{dom} f = \bigcap_{i=1}^{m} \mathbf{dom} \ f_i(x)\)。
3.3.4. 逐点上确界和逐点下确界
当函数数量扩展到无限个时,可能不存在最大值或最小值,但可以用上界和下界来衡量。例如,如果对于任意 \(y \in \mathscr{A}\),函数 \(f(x,y)\) 关于 \(x\) 都是凸的,则逐点上确界函数:
关于 \(x\) 也是凸的。类似的,一系列凹函数的逐点下确界也是凹函数。
3.3.5. 向量的最大 \(r\) 个分量和
\(\forall x \in \mathbf{R}^n\),从 \(n\) 个分量中取出 \(r\) 个,使这 \(r\) 个分量之和最大。令函数 \(f(x)\) 为这 \(r\) 个分量之和,即:
因为 \(f(x)\) 是 \(C_n^r\) 个线性函数的逐点最大,所以 \(f(x)\) 也是凸(既凸又凹)函数。
3.3.6. 复合函数
给定函数 \(h: \mathbf{R}^k \rightarrow \mathbf{R}, g: \mathbf{R}^n \rightarrow \mathbf{R}^k\),定义复合函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}\):
其中,\(\mathbf{dom} f = \{ x \in \mathbf{dom} g \ | \ g(x) \in \mathbf{dom} h\}\)。有如下规定:
- 考虑一般情况,\(n, k \ge 1\),\(h, g\) 不一定可微,\(\mathbf{dom} \ g, \mathbf{dom} \ h\) 不一定是全空间;
- 定义 \(\tilde{h}(x) = \begin{split} \left\{ \begin{array} \ h(x) & x \in \mathbf{dom} h \\ \infty & x \notin \mathbf{dom} h \ \& \ x \in \mathbf{R}^k(h 凸) \\ -\infty & x \notin \mathbf{dom} h \ \& \ x \in \mathbf{R}^k(h 凹) \end{array} \right. \end{split}\)
则关于复合函数 \(f(x) = h(g(x))\) 的凹凸性,有如下结论:
| \(h\) | \(\tilde{h}\) | \(g\) | \(f\) |
|---|---|---|---|
| 凸 | 不降 | 凸 | 凸 |
| 凸 | 不增 | 凹 | 凸 |
| 凹 | 不降 | 凹 | 凹 |
| 凹 | 不增 | 凸 | 凹 |
一些常见函数的复合结论:
- 若 \(g\) 是凸函数,则 \(\exp(g(x))\) 是凸函数;
- 若 \(g\) 是大于零的凹函数,则 \(\log g(x)\) 是凹函数;
- 若 \(g\) 是大于零的凹函数,则 \(1/g(x)\) 是凹函数;
- 若 \(g\) 是大于等于零的凸函数,\(p \ge 1\),则 \(g^p(x)\) 是凸函数;
3.3.7. 透视函数
给定函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}\),则 \(f\) 的透视 \(g: \mathbf{R}^{n+1} \rightarrow \mathbf{R}\) 定义为:
其定义域为 \(\mathbf{dom} g = \{ (x,t) \ | \ x/t \in \mathbf{dom} f, t > 0\}\)。注意函数的透视与集合(凸集)的透视运算规则不同,但同样可以保持原函数(原集合)的凹凸性。
3.4. 共轭函数
设有函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}\),则 \(f\) 的共轭函数 \(f^{*}: \mathbf{R}^n \rightarrow \mathbf{R}\) 定义为:
其中使逐点上确界有上限,即 \((y^T x - f(x))\) 在 \(\mathbf{dom} f\) 有上界的所有 \(y \in \mathbf{R}^n\) 构成了共轭函数的定义域。由于共轭函数是一系列关于 \(y\) 的仿射函数的逐点上确界,所以其为凸函数,无论 \(f\) 是否为凸函数。

3.5. 拟凸函数
定义
如果函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}\) 的定义域及任意 \(\alpha\) 下水平集均为凸集,则 \(f\) 称为拟凸函数:
通俗的讲,以拟凸函数 \(y = \log x, x > 0\) 为例,在图像上任意划一条线 \(y = \alpha\),则 \(y \le \alpha\) 对应的所有 \(x\) 取值的集合(就在 \(x\) 轴上),是一个凸集(而不是那种断断续续的)。
拟凹函数
如果函数 \(f: \mathbf{R}^n \rightarrow \mathbf{R}\) 的定义域及任意 \(\alpha\) 上水平集均为凸集,则 \(f\) 称为拟凹函数:
四、凸优化问题
4.1. 基本术语
4.1.1. 一般优化问题
优化问题的数学描述如下。其中,\(x \in \mathbf{R}^n\) 称为优化变量,\(f_0: \mathbf{R}^n \rightarrow \mathbf{R}\) 称为目标函数,\(f_i(x), h_i(x)\) 分别是不等式约束和等式约束。如果整个优化问题没有约束,则称为无约束优化问题
对目标函数和所有约束函数均有定义的点集,称为优化问题的定义域。定义域中满足所有约束的点 \(x \in \mathscr{D}\),称为可行解:
最优值的定义如下(可以取无穷,即优化问题不可行),如果可行解 \(x^*\) 满足 \(f_0(x^*) = p^*\),则该解被称为最优解:
如果最优集是空集(没有最优解),但有 \(f_0(x) \le p^* + \epsilon, \epsilon > 0\) 成立,称这样的可行解 \(x\) 为\(\epsilon\) 次优解。
4.1.2. 凸优化问题
凸优化问题的数学描述如下,基本术语与一般优化问题保持一致:
相较于一般的优化问题,多了三个附加条件:
- 目标函数和不等式约束函数必须是凸函数
- 凸优化问题的定义域,可行集必定都是凸集
- 等式约束必须是仿射的
4.2. 不等式与性质
4.2.1. 常用不等式
Jensen 不等式
也叫琴生不等式或均值不等式,最初的 Jensen 不等式如下:
可扩展为凸函数形式:
或无穷点集形式:
算数几何平均不等式
可扩展至更一般的形式:
4.2.2. 常用性质
可微函数的最优性条件
假设凸优化问题的目标函数是可微的,令 \(X\) 表示该问题的可行集,那么 \(x\) 是最优解的充要条件是:
4.3. 线性规划问题(LP)
4.4. 线性分式规划(LFP)
4.5. 二次规划(QP、QCQP)
五、对偶
5.1. 拉格朗日对偶函数
5.1.1. 拉格朗日函数
考虑标准形式的优化问题(不一定凸),其中自变量 \(x \in \mathbf{R}^n\),设问题的定义域是 \(\mathscr{D} = \bigcap_{i=0}^{m} \mathbf{dom} f_i \cap \bigcap_{i=1}^{p} \mathbf{dom} h_i\) 是非空集合,最优值为 \(p^*\)。其形式如下:
在此基础上定义拉格朗日函数 \(L(x, \lambda, v): \mathbf{R}^n \times \mathbf{R}^m \times \mathbf{R}^p \rightarrow \mathbf{R}\) 如下。其中 \(\lambda, v\) 称为对偶变量或拉格朗日乘子:
5.1.2. 拉格朗日对偶函数
在此基础上定义拉格朗日对偶函数 \(g(\lambda, v): \mathbf{R}^m \times \mathbf{R}^p \rightarrow \mathbf{R}\) 如下:
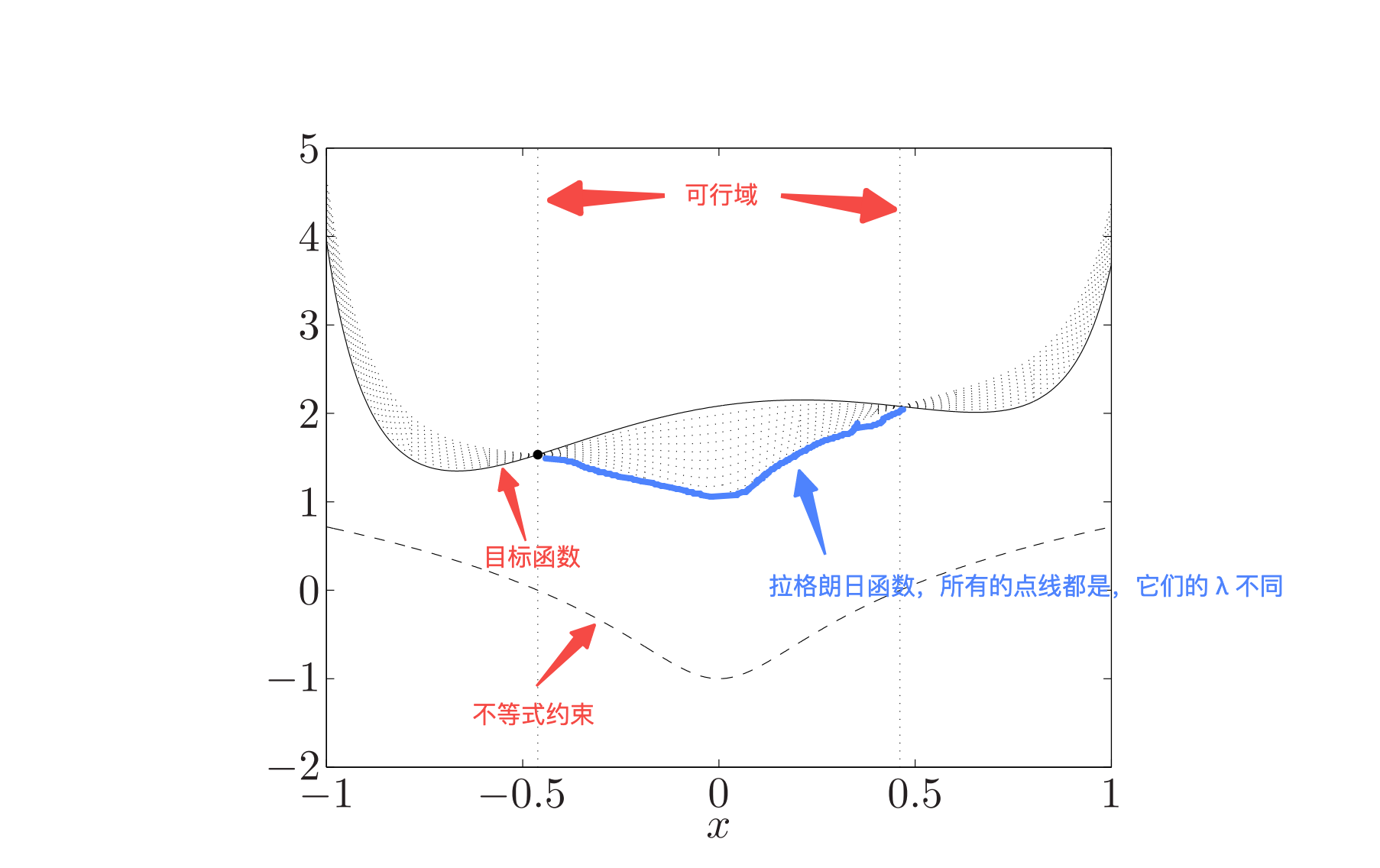
注意,因为拉格朗日函数关于 \(\lambda, v\) 是仿射的(不是 \(x\)),所以对偶函数是关于 \(\lambda, v\) 的一组仿射函数的逐点下确界(凸函数的逐点上确界是凸的,凹函数的逐点下确界是凹的,仿射函数既凸又凹)。也就是说不论原问题的凹凸性,对偶函数一定是凹函数。
下图是一个优化问题的图像示例(其最优解在 \(x = -0.49\)),包含取不同拉格朗日乘子得到的拉格朗日函数:
5.1.3. 最优值的下界
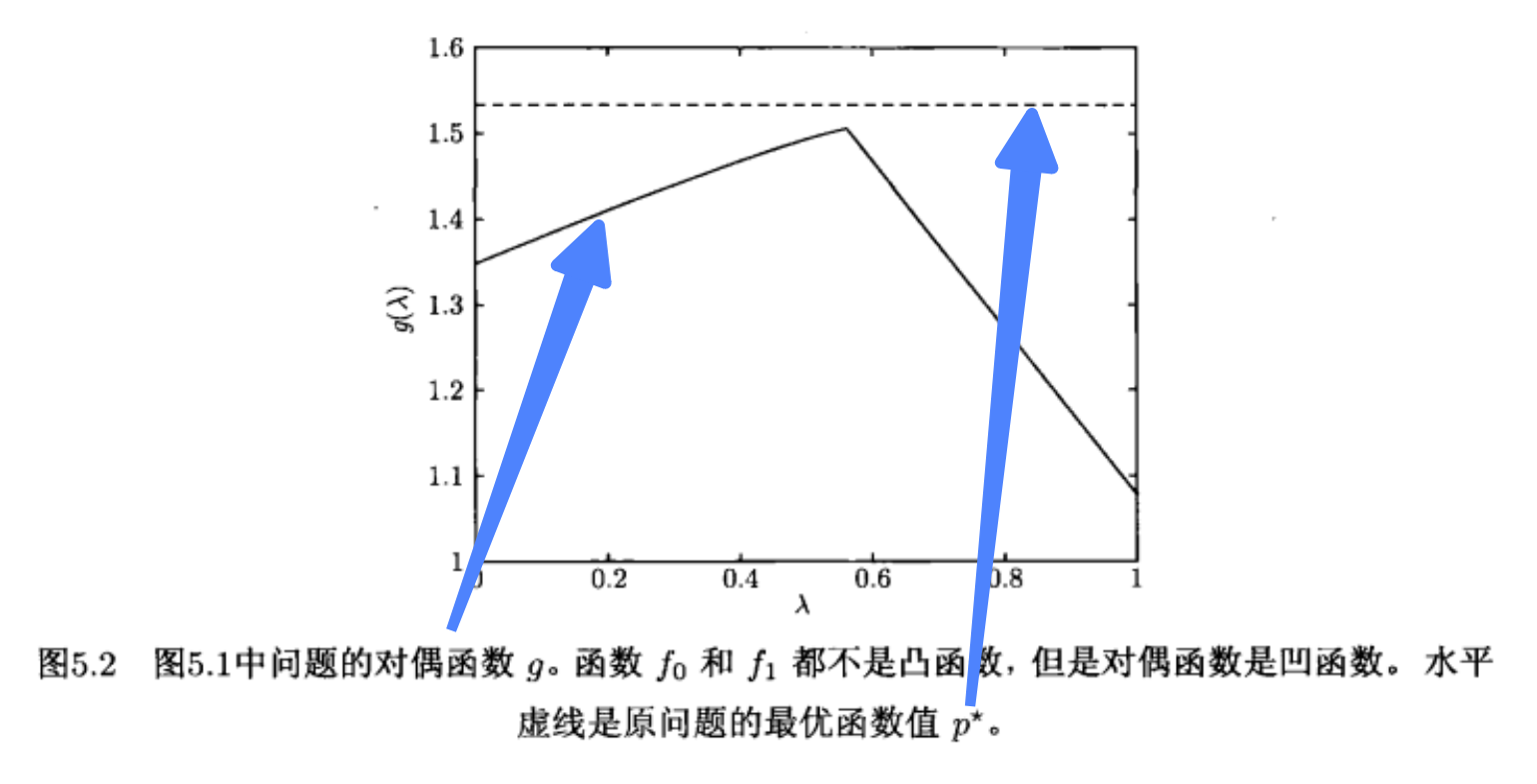
对偶函数的最优值(\(d^{*}\),即最大值),构成了原问题的一个下界(即 \(d^{*} \le p^{*}\))。很容易理解,因为对于原问题的任意可行解,该解的对偶函数值,必然小于等于该解的拉格朗日函数值(因为逐点下确界);而拉格朗日函数值又小于等于该解目标函数值(因为约束函数的值是非正的)。即 \(\forall \lambda \succeq 0\) 和 \(v\),有下式成立:
下图是上图示例, \(x = p^{*} = -0.49\) 时的对偶函数,即关于 \(\lambda\) 的逐点下确界,可以看到图像始终在原问题最优值下方:
5.1.4. 拉格朗日对偶问题
得到拉格朗日对偶函数之后,对于任意的一组 \((\lambda, v)\),其中 \(\lambda \succeq 0\),对偶函数都可以给出原问题最优值 \(p^{*}\) 的一个下界。那么如何从对偶函数得出最好的下界?只需要让这个下界最大化,即最接近原问题最优值,这个问题可表述为如下优化问题:
5.2. 对偶性
5.2.1. 弱对偶性
拉格朗日对偶函数的最优值,即原问题最优值 \(p^{*}\) 的最好下界,记为 \(d^{*}\)。即使原问题非凸,也有 \(d^{*} \le p^{*}\) 成立。这个性质称为弱对偶性。
将差值 \(p^{*} - d^{*}\) 称为原问题的最优对偶间隙,显然其总是非负的。
5.2.2. 强对偶性
如果等式 \(p^{*} = d^{*}\) 即 \(f_0(x^*) = g(\lambda^*, \mathscr{v}^*)\) 成立,即最优对偶间隙为零,则强对偶性成立。如果原问题是凸问题,强对偶性通常(但不总是)成立。而一般情况下,强对偶性不成立。
5.2.3. Slater 条件
相对内部(Relative Interior)
其中 \(B(x, r)\) 表示以 \(x\) 为中心,\(r\) 为半径的 Euclid 球(\(n\) 维球),\(\mathbf{aff}\ \mathscr{D}\) 表示 \(\mathscr{D}\) 的仿射包。其表示的含义就是,将 \(\mathscr{D}\) 去掉边界后得到的区域。
Slater 条件(对偶性充分条件)
对于如下凸优化问题,如果总是 \(\exists x \in \mathbf{relint} \ \mathscr{D}\),使得 \(\forall i= 1, ..., m\),均有 \(f_i(x) < 0, Ax = b\) 成立(不等式约束严格成立),则称 Slater 条件满足:
当原问题是凸问题且 Slater 条件成立时,强对偶性成立,即有 \(d^{*} = p^{*}\) 成立。判断 Slater 条件时,不等式约束如果是仿射的,则不要求 “严格小于” 成立。也就是说,如果存在一部分不等式约束是仿射的,即使它们不能严格小于,也不影响 Slater 条件的判定。
5.2.4. 对偶性的几何解释
令原函数和约束函数的函数值集合为:
令 \(\mathbf{u} = (f_1(x), ..., f_m(x))^T, \mathbf{v} = (h_0(x), ...h_p(x))^T, t = f_0(x)\),则原问题最优值 \(p^{*}\) 可表示为:
则拉格朗日函数:
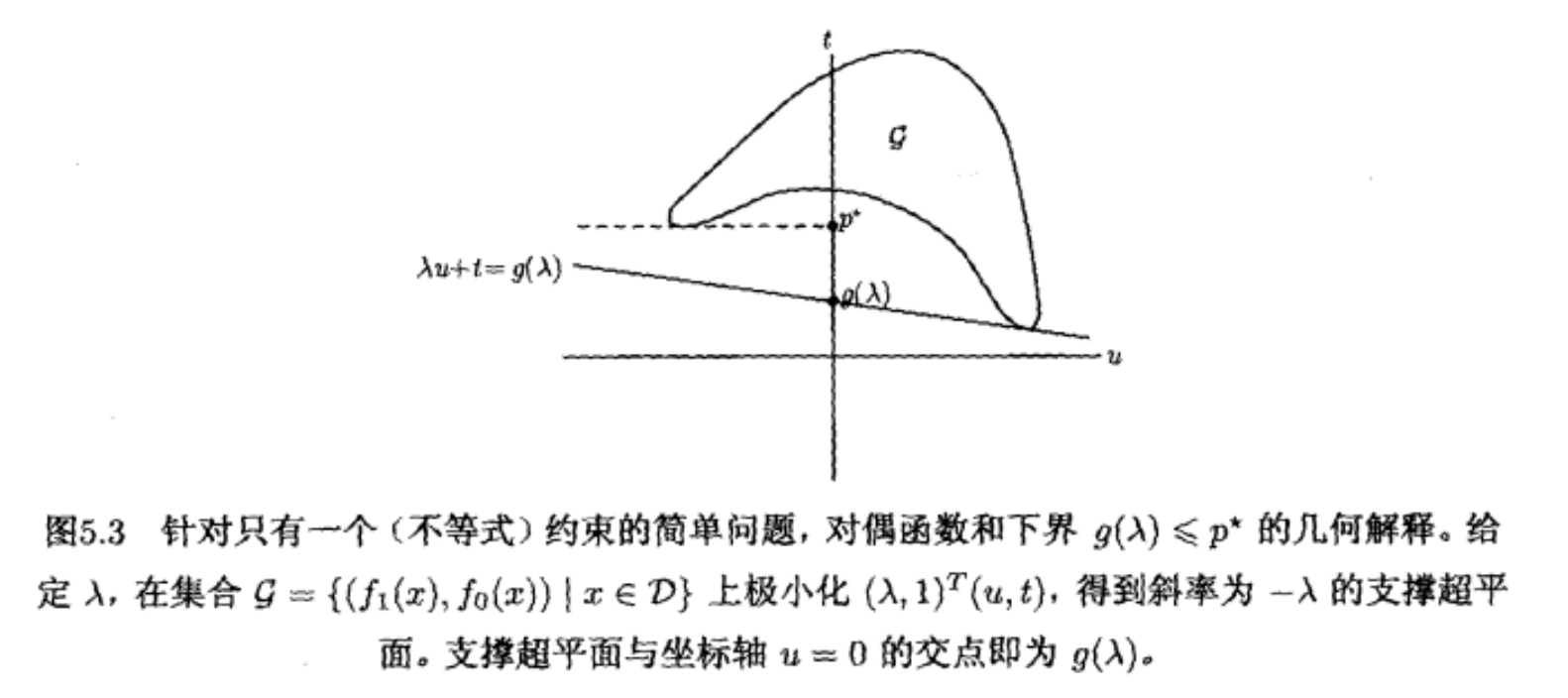
在 \((\mathbf{u}, \mathbf{v}, t) \in \mathscr{G}\) 上极小化拉格朗日函数,则得到以 \((\lambda, \mathscr{v})\) 为自变量的对偶函数:
根据逐点下确界的定义,有 \(L \ge g(\lambda, \mathscr{v})\) 成立,该不等式定义了 \(\mathscr{G}\) 的一个支撑超平面(下图是不包含等式约束,不等式约束也仅有一个的示例,这样可以以图像的方式展示它们之间的关系):
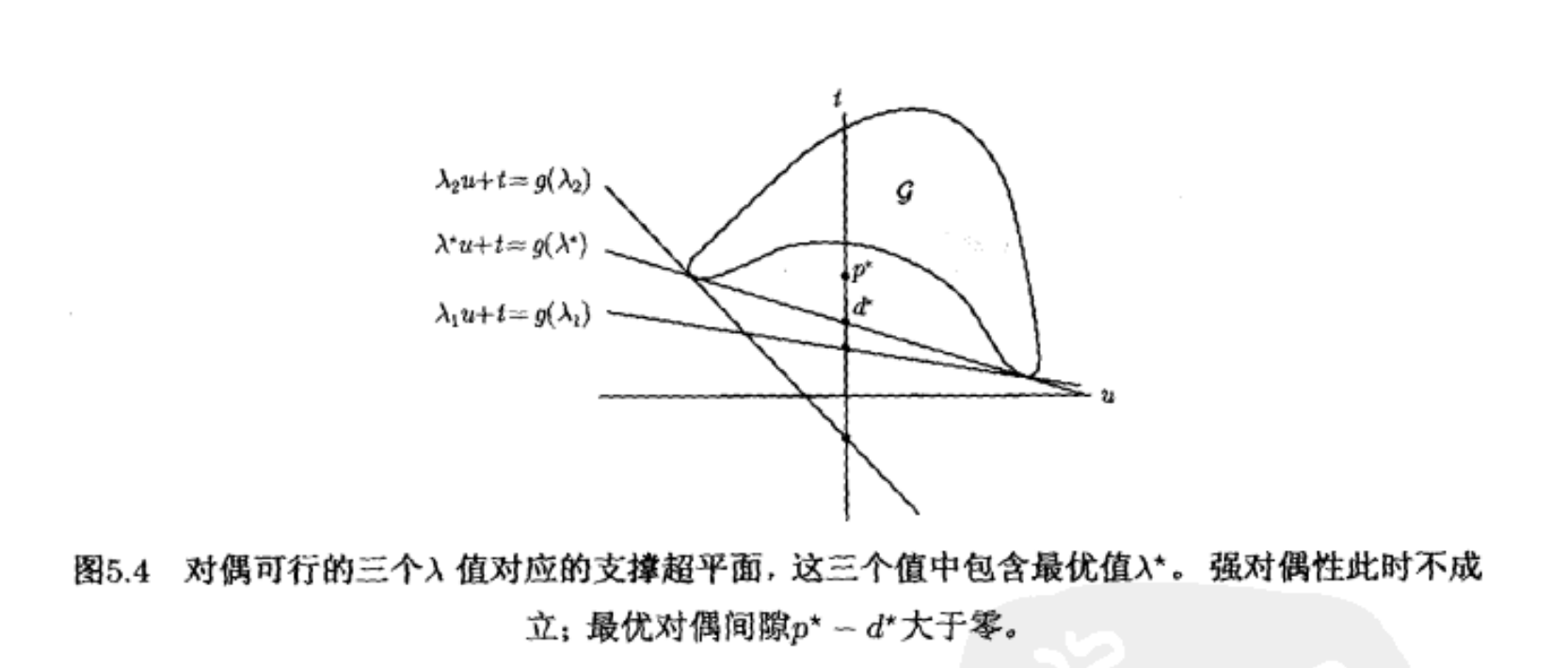
下图为不同 \(\lambda\) 对应的对偶函数:
5.2.5. 互补松弛性
假设强对偶性成立,令 \(x^*\) 是原问题的最优解,\((\lambda^*, \mathscr{v}^*)\) 是对偶问题的最优解。则有:
显而易见,上述推导过程中的所有不等式均取等号。由此可得:
此条件称为互补松弛性,它对任意原问题最优解 \(x^*\) 和对偶问题最优解 \((\lambda^*, \mathscr{v}^*)\) 均成立,前提是强对偶性成立。粗略的讲,在最优点 \(x^*\) 处,如果第 \(i\) 个约束起作用了(\(f_i(x) < 0\)),则该项最优拉格朗日乘子一定为零(\(\lambda_i^* = 0\))。
5.3. KKT 条件
考虑任意优化问题:
假设对于该问题:
- 强对偶性成立,即 \(p^* = d^*\)
- 所有的函数均可微(原问题、约束,定义域取开集)
对应的对偶函数:
对应的对偶问题:
令 \(x^*\) 是原问题的最优解,\((\lambda^*, \mathscr{v}^*)\) 是对偶问题的最优解。
5.3.1. 非凸问题的 KKT 条件
因为 \(L(x, \lambda^*, \mathscr{v}^*)\) 关于 \(x\) 的极小 \(\inf\) 在 \(x^*\) 处取得最小值,因此 \(L\) 在 \(x^*\) 处的导数为零,即:
结合其它条件,我们就得到了 Karush-Kuhn-Tucker (KKT 条件):
对于目标函数和约束函数可微的任意优化问题,如果强对偶性成立,那么任何一对原问题的最优解和对偶问题最优解必定满足 KKT 条件(必要条件,反之不成立,满足 KKT 条件的点不一定是原问题和对偶问题最优解)。
5.3.2. 凸问题的 KKT 条件
如果原问题为凸问题,且满足强对偶性成立和可微,则 KKT 条件为充要条件。即 KKT 条件成立的点,一定是原问题和对偶问题的最优解。
5.4. 扰动及灵敏度分析
5.4.1. 扰动
考虑对一般优化问题进行扰动后的问题:
通过控制 \(u_i, v_i\) 的正负,来放松或加强某个约束。令 \(p^*(u, v)\) 为扰动问题关于 \((u, v)\) 的最优值函数,则有 \(p^*(0, 0) = p^*\)。
一个全局不等式
如果强对偶性成立,且对偶问题最优值可取。则对于任意 \(u, v\) 和该扰动问题的最优解 \(x\)(凌青老师是按照 \(x\) 是扰动问题最优解证明的。但书上写的是任意可行解,这里书上写的貌似有点问题),均有如下不等式成立(注意 \(v\) 和 \(\mathscr{v}\) 不一样,前者是扰动,后者是拉格朗日乘子):
上述推论依据:
- 第一行是根据强对偶性成立即 \(p^* = d^*\) 得到的
- 第二行是根据对偶函数的定义即 \(\inf\) 性质得到的
- 第三行是根据扰动约束即 \(f_i(x) \le u_i, h_i(x) = v_i\) 得到的
- 第四行是扰动最优解的两种表达方式即 \(f_0(x) = p^*(u, v)\)
5.4.2. 灵敏度结论
选择 \((\lambda, \mathscr{v})\) 和 \((u, v)\) 对扰动最优值的影响,由上述不等式得到:
- \(\lambda_i^*\) 较大时,加强第 \(i\) 个约束,会导致 \(p^*(u, v)\) 大幅增大
- \(\mathscr{v}_i^*\) 较大且大于零时,选择 \(v_i < 0\),会导致 \(p^*(u, v)\) 大幅增大
- \(\mathscr{v}_i^*\) 较大且小于零时,选择 \(v_i > 0\),会导致 \(p^*(u, v)\) 大幅增大
- \(\lambda_i^*\) 较小时,放松第 \(i\) 个约束,\(p^*(u, v)\) 不会减小太多
- \(\mathscr{v}_i^*\) 较小且大于零时,选择 \(v_i > 0\),\(p^*(u, v)\) 不会减小太多
- \(\mathscr{v}_i^*\) 较小且小于零时,选择 \(v_i < 0\),\(p^*(u, v)\) 不会减小太多
5.5. 例子
5.5.1. Boolean LP(布尔线性规划问题)
LP Relaxation
对原问题进行 LP 松弛,即将 \(x_i\) 的离散约束,松弛为一个线性约束,得到新的优化问题。松弛问题更容易求解,且其给出了原优化问题的一个下界:
Lagrange Relaxation
将原问题等价表述为以下问题,布尔约束被转化为二次等式约束。通过求解等价问题的拉格朗日对偶问题的最优值,可以得到原问题的另一个下界。通过这种方式求得的原问题最优值下界,称为拉格朗日松弛:
5.5.2. 罚函数方法
带线性等式约束的凸规划问题
原优化问题如下,其中 \(f_0: \mathbf{R}^n \rightarrow \mathbf{R}\) 且可微,\(A \in \mathbf{R}^{m \times n}, rank A = m\):
通过引入辅助函数,其中 \(\alpha > 0\) 为参数,\(\alpha \Vert Ax-b \Vert_2^2\) 被称为惩罚项。此方法的思路是寻找辅助函数的最优值 \(\tilde{x}\),基于这个值找出原问题的对偶问题的一个可行解,再基于这个可行解给出原问题最优值的一个下界:
带线性不等式约束的凸规划问题
原优化问题如下,其中 \(f_0: \mathbf{R}^n \rightarrow \mathbf{R}\) 且可微,\(A \in \mathbf{R}^{m \times n}, rank A = m\):
