HashMap
概述
HashMap 主要用来存放键值对,它基于哈希表的Map接口实现,是常用的Java集合之一。
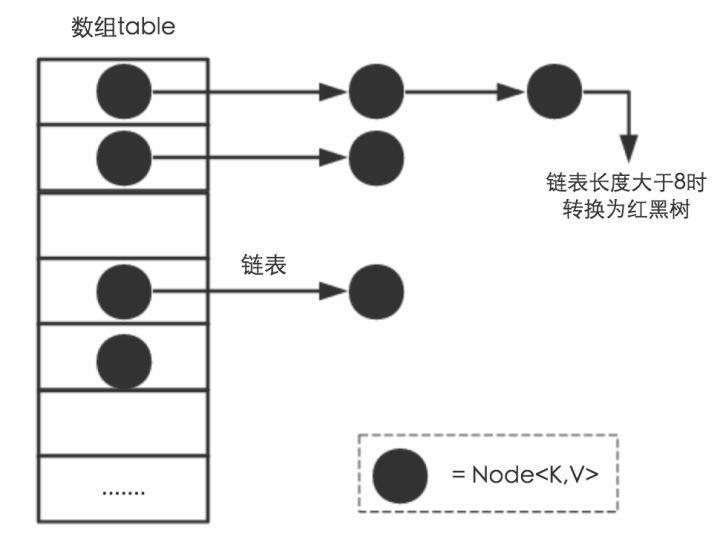
JDK1.8 之前 HashMap 由 数组+链表 组成的,数组是 HashMap 的主体,链表则是主要为了解决哈希冲突而存在的(“拉链法”解决冲突).JDK1.8 以后在解决哈希冲突时有了较大的变化,当链表长度大于阈值(默认为 8)时,将链表转化为红黑树(将链表转换成红黑树前会判断,如果当前数组的长度小于 64,那么会选择先进行数组扩容,而不是转换为红黑树),以减少搜索时间,具体可以参考 treeifyBin方法。
底层数据结构分析
hash方法的源码
hash的主要作用是尽量保证元素的分散性,防止出现hash碰撞
JDK1.8
static final int hash(Object key) {
int h;
// key.hashCode():返回散列值也就是hashcode
// ^ :把高16位与低16为进行异或 按位异或
// >>>:无符号右移,忽略符号位,空位都以0补齐
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
jdk1.7
static int hash(int h) {
h ^= (h >>> 20) ^ (h >>> 12);
return h ^ (h >>> 7) ^ (h >>> 4);
}
相比于 JDK1.8 的 hash 方法 ,JDK 1.7 的 hash 方法的性能会稍差一点点,因为毕竟扰动了 4 次。
JDK1.8之前
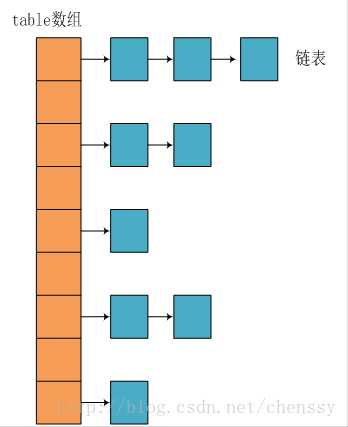
JDK1.8 之前 HashMap 底层是 数组和链表 结合在一起使用也就是 链表散列。HashMap 通过 key 的 hashCode 经过扰动函数处理过后得到 hash 值,然后通过 (n - 1) & hash 判断当前元素存放的位置(这里的 n 指的是数组的长度),如果当前位置存在元素的话,就判断该元素与要存入的元素的 hash 值以及 key 是否相同,如果相同的话,直接覆盖,不相同就通过拉链法解决冲突。
所谓扰动函数指的就是 HashMap 的 hash 方法。使用 hash 方法也就是扰动函数是为了防止一些实现比较差的 hashCode() 方法 换句话说使用扰动函数之后可以减少碰撞。
所谓 “拉链法” 就是:将链表和数组相结合。也就是说创建一个链表数组,数组中每一格就是一个链表。若遇到哈希冲突,则将冲突的值加到链表中即可。
JDK1.8之后
相比于之前的版本,jdk1.8在解决哈希冲突时有了较大的变化,当链表长度大于阈值(默认为8)时,将链表转化为红黑树,以减少搜索时间。
类属性
public class HashMap<K,V> extends AbstractMap<K,V> implements Map<K,V>, Cloneable, Serializable {
// 序列号
private static final long serialVersionUID = 362498820763181265L;
// 默认的初始容量是16
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4;
// 最大容量
static final int MAXIMUM_CAPACITY = 1 << 30;
// 默认的填充因子
static final float DEFAULT_LOAD_FACTOR = 0.75f;
// 当桶(bucket)上的结点数大于这个值时会转成红黑树
static final int TREEIFY_THRESHOLD = 8;
// 当桶(bucket)上的结点数小于这个值时树转链表
static final int UNTREEIFY_THRESHOLD = 6;
// 桶中结构转化为红黑树对应的table的最小大小
static final int MIN_TREEIFY_CAPACITY = 64;
// 存储元素的数组,总是2的幂次倍
transient Node<k,v>[] table;
// 存放具体元素的集
transient Set<map.entry<k,v>> entrySet;
// 存放元素的个数,注意这个不等于数组的长度。
transient int size;
// 每次扩容和更改map结构的计数器
transient int modCount;
// 临界值 当实际大小(容量*填充因子)超过临界值时,会进行扩容
int threshold;
// 加载因子
final float loadFactor;
}
loadFactor加载因子
loadFactor加载因子是控制数组存放数据的疏密程度,loadFactor越趋近于1,那么 数组中存放的数据(entry)也就越多,也就越密,也就是会让链表的长度增加,loadFactor越小,也就是趋近于0,数组中存放的数据(entry)也就越少,也就越稀疏。
loadFactor太大导致查找元素效率低,太小导致数组的利用率低,存放的数据会很分散。loadFactor的默认值为0.75f是官方给出的一个比较好的临界值。
threshold
threshold = capacity * loadFactor,当Size>=threshold的时候,那么就要考虑对数组的扩增了,也就是说,这个的意思就是 衡量数组是否需要扩增的一个标准。
Node节点类
// 继承自 Map.Entry<K,V>
static class Node<K,V> implements Map.Entry<K,V> {
// 哈希值,存放元素到hashmap中时用来与其他元素hash值比较
final int hash;
final K key;
V value;
// 指向下一个节点
Node<K,V> next;
}
TreeNode节点类
static final class TreeNode<K,V> extends LinkedHashMap.Entry<K,V> {
TreeNode<K,V> parent; // 父
TreeNode<K,V> left; // 左
TreeNode<K,V> right; // 右
TreeNode<K,V> prev; // needed to unlink next upon deletion
boolean red; // 判断颜色
TreeNode(int hash, K key, V val, Node<K,V> next) {
super(hash, key, val, next);
}
// 返回根节点
final TreeNode<K,V> root() {
for (TreeNode<K,V> r = this, p;;) {
if ((p = r.parent) == null)
return r;
r = p;
}
构造方法
// 默认构造函数。
public HashMap() {
this.loadFactor = DEFAULT_LOAD_FACTOR;
}
// 包含另一个“Map”的构造函数
public HashMap(Map<? extends K, ? extends V> m) {
this.loadFactor = DEFAULT_LOAD_FACTOR;
putMapEntries(m, false);
}
// 指定“容量大小”的构造函数 建议使用这个,减少扩容的开销
public HashMap(int initialCapacity) {
this(initialCapacity, DEFAULT_LOAD_FACTOR);
}
// 指定“容量大小”和“加载因子”的构造函数
public HashMap(int initialCapacity, float loadFactor) {
if (initialCapacity < 0)
throw new IllegalArgumentException("Illegal initial capacity: " + initialCapacity);
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
if (loadFactor <= 0 || Float.isNaN(loadFactor))
throw new IllegalArgumentException("Illegal load factor: " + loadFactor);
this.loadFactor = loadFactor;
//tableSizeFor()是用来将初始化容量转化大于输入参数且最近的2的整数次幂的数,比如initialCapacity = 7,那么转化后就是8。
this.threshold = tableSizeFor(initialCapacity);
}
final void putMapEntries(Map<? extends K, ? extends V> m, boolean evict) {
int s = m.size();
if (s > 0) {
// 判断table是否已经初始化
if (table == null) {
// 计算map的容量,键值对的数量 = 容量 * 填充因子
float ft = ((float)s / loadFactor) + 1.0F;
int t = ((ft < (float)MAXIMUM_CAPACITY) ?
(int)ft : MAXIMUM_CAPACITY);
// 计算得到的t大于阈值,则初始化阈值
if (t > threshold)
threshold = tableSizeFor(t);
}
// 已初始化,并且m元素个数大于阈值,进行扩容处理
else if (s > threshold)
resize();
// 将m中的所有元素添加至HashMap中
for (Map.Entry<? extends K, ? extends V> e : m.entrySet()) {
K key = e.getKey();
V value = e.getValue();
putVal(hash(key), key, value, false, evict);
}
}
}
static final int tableSizeFor(int cap) {
int n = cap - 1;
n |= n >>> 1;
n |= n >>> 2;
n |= n >>> 4;
n |= n >>> 8;
n |= n >>> 16;
return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;
}
|是或运算符,比如说0100 | 0011 = 0111,>>>是无符号右移,忽略符号位,空位都以0补齐,比如说0100 >>> 2 = 0001,现在来说一下这么做的目的:
首先>>>的操作的目的就是把n从最高位以下的几位都填充为1,以010011为例,010011 >>> 1 = 001001,然后001001 | 010011 = 011011,然后再把011011无符号右移两位:011011 >>> 2 = 000110,然后000110 | 011011 = 011111,后面的4、8、16计算过程就都省去了,int类型为32位,所以计算到16就全部结束了,最终得到的就是最高位及其以下的都为1,这样就能保证得到的结果肯定大于或等于原来的n且为奇数,最后再加上1,那么肯定是:大于且最接近输入值的2的整数次幂的数。
那么为什么要先cap - 1呢,我们可以先思考以下,如果传进来的本身就是2的整数幂次,比如说01000,10进制是8,那么如果不减,得到的结果就是16,显然不对。所以先减1的目的是cap如果恰好是2的整数次幂,那么返回的也是本身。
合起来得到这个tableSizeFor()方法的目的:返回大于或等于最接近输入参数的2的整数次幂的数。
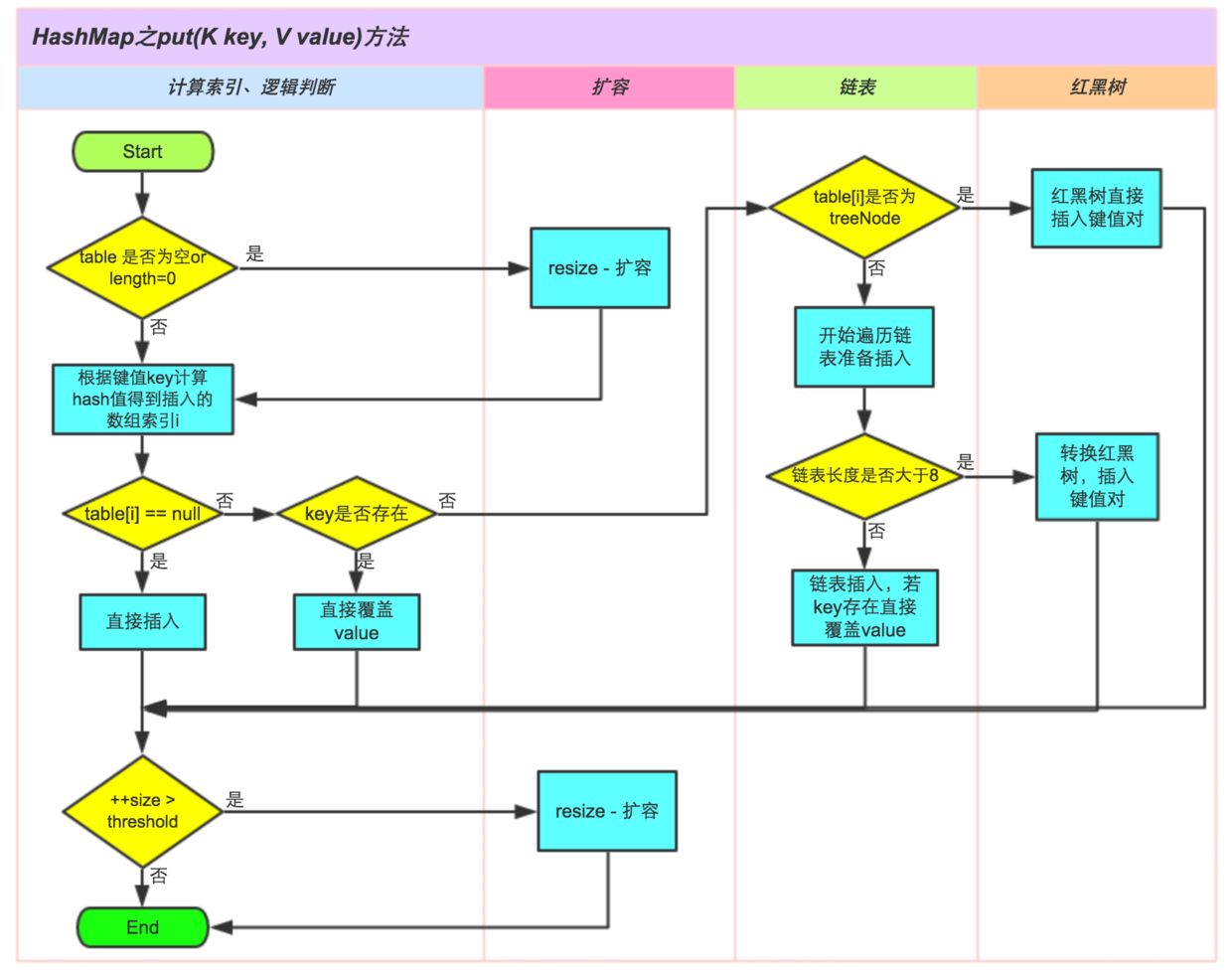
put
对putVal方法添加元素的分析如下:
①如果定位到的数组位置没有元素 就直接插入。
②如果定位到的数组位置有元素就和要插入的key比较,如果key相同就直接覆盖,如果key不相同,就判断p是否是一个树节点,如果是就调用e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value)将元素添加进入。如果不是就遍历链表插入(插入的是链表尾部)。
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
// table未初始化或者长度为0,进行扩容
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
// (n - 1) & hash 确定元素存放在哪个桶中,桶为空,新生成结点放入桶中(此时,这个结点是放在数组中)
if ((p = tab[i = (n - 1) & hash]) == null)
tab[i] = newNode(hash, key, value, null);
// 桶中已经存在元素
else {
Node<K,V> e; K k;
// 比较桶中第一个元素(数组中的结点)的hash值相等,key相等
if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k))))
// 将第一个元素赋值给e,用e来记录
e = p;
// hash值不相等,即key不相等;为红黑树结点
else if (p instanceof TreeNode)
// 放入树中
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
// 为链表结点
else {
// 在链表最末插入结点
for (int binCount = 0; ; ++binCount) {
// 到达链表的尾部
if ((e = p.next) == null) {
// 在尾部插入新结点
p.next = newNode(hash, key, value, null);
// 结点数量达到阈值,转化为红黑树
if (binCount >= TREEIFY_THRESHOLD - 1)
treeifyBin(tab, hash);
// 跳出循环
break;
}
// 判断链表中结点的key值与插入的元素的key值是否相等
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
// 相等,跳出循环
break;
// 用于遍历桶中的链表,与前面的e = p.next组合,可以遍历链表
p = e;
}
}
// 表示在桶中找到key值、hash值与插入元素相等的结点
if (e != null) {
// 记录e的value
V oldValue = e.value;
// onlyIfAbsent为false或者旧值为null
if (!onlyIfAbsent || oldValue == null)
//用新值替换旧值
e.value = value;
// 访问后回调
afterNodeAccess(e);
// 返回旧值
return oldValue;
}
}
// 结构性修改
++modCount;
// 实际大小大于阈值则扩容
if (++size > threshold)
// 插入后回调
resize();
afterNodeInsertion(evict);
return null;
}
resize();
扩容方法
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
//扩容前的容量
int oldCap = (oldTab == null) ? 0 : oldTab.length;
//旧的阈值
int oldThr = threshold;
int newCap, newThr = 0;
//说明之前已经初始化过map
if (oldCap > 0) {
//达到了最大的容量,则将阈值设为最大,并且返回旧的table
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
//如果两倍的旧容量小于最大的容量且旧容量大于等于默认初始化容量,则旧的阈值也扩大两倍。
//oldCap << 1,其实就是*2的意思,不过位运算效率更高。
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
//旧容量为0且旧阈值大于0,则赋值给新的容量(应该是针对初始化的时候指定了其容量的构造函数出现的这种情况)
else if (oldThr > 0)
newCap = oldThr;
//这种情况就是调用无参数的构造函数
else {
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
// 新阈值为0,则通过:新容量*填充因子 来计算
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
//根据新的容量来初始化table,并赋值给table
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
//如果旧的table里面有存放节点,则初始化给新的table
if (oldTab != null) {
// 把每个bucket都移动到新的buckets中
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
//将下标为j的数组赋给临时节点e
if ((e = oldTab[j]) != null) {
//清空
oldTab[j] = null;
//如果该节点没有指向下一个节点,则直接通过计算hash和新的容量来确定新的下标,并指向e
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
//如果为树节点,按照树节点的来拆分
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
//e还有其他的节点,将该桶拆分成两份(不一定均分)
else {
//loHead是拆分后的,链表的头部,tail为尾部
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
//原索引
//根据e的hash值和旧的容量做位与运算是否为0来拆分,注意之前是 e.hash & (oldCap - 1)
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
// 原索引+oldCap
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
// 原索引放到bucket里
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
// 原索引+oldCap放到bucket里
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}
resize()方法对整个数组以及桶进行了遍历,极其耗费性能。所以最好在初始化数组的时候就给默认容量
get(Object key);
public V get(Object key) {
Node<K,V> e;
return (e = getNode(hash(key), key)) == null ? null : e.value;
}
final Node<K,V> getNode(int hash, Object key) {
Node<K,V>[] tab; Node<K,V> first, e; int n; K k;
//先是判断一通table是否为空以及根据hash找到存放的table数组的下标,并赋值给临时变量
if ((tab = table) != null && (n = tab.length) > 0 &&
(first = tab[(n - 1) & hash]) != null) {
//总是先检查数组下标第一个节点是否满足key,满足则返回
if (first.hash == hash && ((k = first.key) == key || (key != null && key.equals(k))))
return first;
// 桶中不止一个节点
if ((e = first.next) != null) {
// 在树中get
if (first instanceof TreeNode)
return ((TreeNode<K,V>)first).getTreeNode(hash, key);
// 在链表中get
do {
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
return e;
} while ((e = e.next) != null);
}
}
return null;
}
remove(Object key)
public V remove(Object key) {
Node<K,V> e;
return (e = removeNode(hash(key), key, null, false, true)) == null ?
null : e.value;
}
final Node<K,V> removeNode(int hash, Object key, Object value,boolean matchValue, boolean movable) {
Node<K,V>[] tab; Node<K,V> p; int n, index;
//如果 节点数组tab不为空、数组长度n大于0、根据hash定位到的节点对象p(该节点为 树的根节点 或 链表的首节点)不为空,需要从该节点p向下遍历,找到那个和key匹配的节点对象
if ((tab = table) != null && (n = tab.length) > 0 &&
(p = tab[index = (n - 1) & hash]) != null) {
Node<K,V> node = null, e; K k; V v;
// 如果当前节点的键和key相等,那么当前节点就是要删除的节点,赋值给node
if (p.hash == hash &&((k = p.key) == key || (key != null && key.equals(k))))
node = p;
//判断有无next节点
else if ((e = p.next) != null) {
//此节点红黑树,那么调用getTreeNode方法从树结构中查找满足条件的节点
if (p instanceof TreeNode)
node = ((TreeNode<K,V>)p).getTreeNode(hash, key);
else {
//链接循环足个比较
do {
// 如果e节点的键是否和key相等,e节点就是要删除的节点,赋值给node变量,调出循环
if (e.hash == hash &&
((k = e.key) == key ||
(key != null && key.equals(k))))
node = e;
break;
}
//p保存当前遍历到的节点
p = e;
} while ((e = e.next) != null);
}
}
//需要找的节点不为空
if (node != null && (!matchValue || (v = node.value) == value ||(value != null && value.equals(v)))) {
if (node instanceof TreeNode)
//在树中删除节点
((TreeNode<K,V>)node).removeTreeNode(this, tab, movable);
//如果要删除的是头节点
else if (node == p)
tab[index] = node.next;
else
//不是头节点,将当前节点指向删除节点的下一节点
p.next = node.next;
++modCount;
--size;
afterNodeRemoval(node);
return node;
}
}
return null;
}
treeifyBin(Node<K,V>[] tab, int hash)
将桶变成红黑树
final void treeifyBin(Node<K,V>[] tab, int hash) {
int n, index; Node<K,V> e;
//这里MIN_TREEIFY_CAPACITY派上了用场,及时单个桶数量达到了树化的阈值,总的容量没到,也不会进行树化
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize();
else if ((e = tab[index = (n - 1) & hash]) != null) {
TreeNode<K,V> hd = null, tl = null;
do {
// 返回树节点 return new TreeNode<>(p.hash, p.key, p.value, next);
TreeNode<K,V> p = replacementTreeNode(e, null);
//为空说明是第一个节点,作为树的根节点
if (tl == null)
hd = p;
else {
//设置树的前后节点
p.prev = tl;
tl.next = p;
}
tl = p;
} while ((e = e.next) != null);
if ((tab[index] = hd) != null)
//对整棵树进行处理,形成红黑树
hd.treeify(tab);
}
}
HashMap总结
-
允许key和value为null
-
基本上和Hashtable(已弃用)相似,除了非同步以及键值可以为null
-
不能保证顺序
-
访问集合的时间与map的容量和键值对的大小成比例
-
影响HashMap性能的两个变量:填充因子和初始化容量
-
HashMap扩容是2的倍数。初始Map的时候无论传的容量是多少,只要不是2的N次幂,都会在内部处理为2的内次幂。为什么是2的倍数和hash碰撞有关https://blog.csdn.net/apeopl/article/details/88935422
-
通常来说,默认的填充因为0.75是一个时间和空间消耗的良好平衡。较高的填充因为减少了空间的消耗,但是增加了查找的时间
-
最好能够在创建HashMap的时候指定其容量,这样能存储效率比使其存储空间不够后自动增长更高。毕竟重新调整耗费性能
-
使用大量具有相同hashcode值的key,将降低hash表的表现,最好能实现key的comparable
-
注意hashmap是不同步的。如果要同步请使用
Map m = Collections.synchronizedMap(new HashMap(...)); -
除了使用迭代器的remove方法外其的其他方式删除,都会抛出ConcurrentModificationException.
-
map通常情况下都是hash桶结构,但是当桶太大的时候,会转换成红黑树,可以增加在桶太大情况下访问效率,但是大多数情况下,结构都以桶的形式存在,所以检查是否存在树节点会增加访问方法的时间
-
JDK1.7和JDK1.8具体不同https://www.jianshu.com/p/8324a34577a0

 浙公网安备 33010602011771号
浙公网安备 33010602011771号