B树和B+树
$B$ 树是为了磁盘或其它存储设备而设计的一种多叉平衡查找树,多叉就是多个分支的意思,二叉树就是最多只有两个分支的树。
如下图所示,即是一棵 $B$ 树。
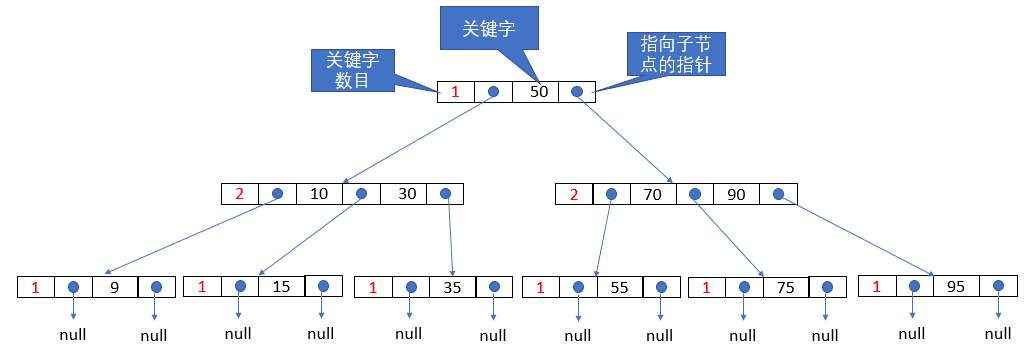
一棵 $m$ 阶的 $B$ 树必须满足如下条件:
1)每个结点最多含有 $m$ 个分支,也就是说:每个节点最多 $m-1$ 个关键字。
2)根节点最少可以有 $1$ 个关键字,其它节点最少有 $\lceil \frac{m}{2} \rceil - 1$ 个关键字。
3)每个节点的内部结构为:$n$ 为节点中关键字的个数,$K_i,i=1,2,...,n$ 为关键字,从小到大排列,$P_i,i=0,1,...,n$ 为指向关键字满足
$[K_i,K_{i+1}]$ 范围的孩子节点。
![]()
这里认为上面的 $B$ 树高度为 $3$,第三层就是叶子节点,至于有些材料说那些 $null$ 是叶子节点,简直扯淡。
$B$ 树的节点类型定义如下,这个定义只是用来查找内存数据的,如果用来查找外存,代码需要调整一下,下面叙述。
typedef int KeyType;
struct BTNode {
int keyNum; // 关键字个数
struct BTNode *parent; // 指向父节点
struct BTNode **ptr; // 子树指针向量, ptr[0],ptr[1],...,ptr[keyNum]
KeyType **key; // 关键字向量, key[0],key[1],...,key[keyNum-1]
}
$B$ 树设计的目的是用来查找磁盘的,为了简单,假设每个盘块正好存放一个 $B$ 树的结点,这里用少量数据构造一棵 $3$ 叉树的形式,来描述文件查
找的具体过程。
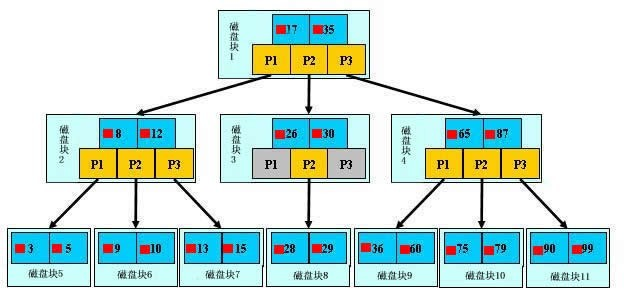
上面的图中比如根结点,其中 $17$ 表示一个磁盘文件的文件名;小红方块表示这个 $17$ 文件内容在硬盘中的存储位置;$P_1$ 表示指向 $17$ 左子树的指针。
此时节点类型定义如下:
typedef char* KeyType;
struct BTNode {
int keyNum; // 关键字个数
struct BTNode *parent; // 指向父节点
struct BTNode **ptr; // 子树指针向量, ptr[0],ptr[1],...,ptr[keyNum],每个元素存放另外一个盘块的地址
KeyType **key; // 关键字向量, 存储的是文件名
FILE_HARD_ADDR *offset; // 存储每个文件(关键字)的磁盘地址
}
下面来模拟下查找文件 $29$ 的过程:
1)根据根结点指针找到文件目录的根磁盘块 $1$,将其中的信息导入内存。【磁盘 $IO$ 操作 $1$ 次】
2)此时内存中有两个文件名 $17$、$35$ 和三个存储其他磁盘页面地址的数据。根据算法我们发现:$17<29<35$,因此我们找到指针 $P_2$。
3)根据 $P_2$ 指针,我们定位到磁盘块 $3$,并将其中的信息导入内存。【磁盘 $IO$ 操作 $2$ 次】
4)此时内存中有两个文件名 $26$、$30$ 和三个存储其他磁盘页面地址的数据。根据算法我们发现:$26<29<30$,因此我们找到指针 $P_2$。
5)根据 $P_2$ 指针,我们定位到磁盘块 $8$,并将其中的信息导入内存。【磁盘 $IO$ 操作 $3$ 次】
6)此时内存中有两个文件名 $28$、$29$。根据算法我们查找到文件名 $29$,并定位了该文件内存的磁盘地址。
分析上面的过程,发现需要 $3$ 次磁盘 $IO$ 操作和 $3$ 次内存查找操作。关于内存中的文件名查找,由于是一个有序表结构,可以利用折半查找提高效率。
至于 $IO$ 操作是影响整个 $B$ 树查找效率的决定因素。
根据上面的例子我们可以看出,对于辅存做 $IO$ 读的次数取决于 $B$ 树的高度。而 $B$ 树的高度由什么决定的呢?
问题:一棵 $m$ 阶 $B$ 树,关键字个数为 $n$,求高度 $h$(不包含叶子节点)的取值范围。
1)要使高度 $h$ 最小,则每个节点的分支数均取上限 $m$,此时的 $B$ 树就是一个完全 $m$ 叉树,此时高度为
$$h = \lceil \; \log_m \left (\lceil \frac{n}{m-1} \rceil (m-1)+1 \right ) \; \rceil$$
2)要使 $h$ 最大,则每个节点的分支数均取下限 $2$(根)或者 $\lceil \frac{m}{2} \rceil$(非根),此时每层的节点个数为:
$$1-floor: \; 1 \\
2-floor: \; 2 \\
3-floor: \; 2\lceil \frac{m}{2} \rceil \\
4-floor: \; 2\lceil \frac{m}{2} \rceil^{2} \\
\vdots \\
h-floor: \; 2\lceil \frac{m}{2} \rceil^{h-2}$$
所以
$$1 + \left ( 2 + 2\lceil \frac{m}{2} \rceil + 2\lceil \frac{m}{2} \rceil^{2} + \cdots + 2\lceil \frac{m}{2}
\rceil^{h-2} \right )\left (\lceil \frac{m}{2} \rceil - 1 \right ) \\
= 1 + \frac{2\left ( 1 - \lceil \frac{m}{2} \rceil^{h-1} \right )}{1 - \lceil \frac{m}{2} \rceil}
\left (\lceil \frac{m}{2} \rceil - 1 \right ) \\
= 2\lceil \frac{m}{2} \rceil^{h-1} - 1 = n$$
所以
$$h = \log_{\lceil \frac{m}{2} \rceil}\frac{n+1}{2} + 1$$
$B$ 树的插入:因为关键字个数可能超过 $m-1$,故涉及拆分操作。规则如下:
a. 定位:利用 $B$ 树查找算法,找出插入这个关键字的最低层中的某个非叶结点($B$ 树中插入关键字一定插入在最低层非叶结点内)。
b. 插入:在 $B$ 树中,每个非失败结点的关键字个数都在 $[\; \lceil \frac{m}{2} \rceil-1, m-1\;]$ 之间,当插入后的结点关键字个数小于 $m$,
则可以直接插入;插入后检查被插入节点内关键字的个数,当插入后的结点关键字个数大于 $m-1$ 时,则必须对结点进行分裂。
分裂的方法是:取一个新结点,将插入 key 后的原结点从中间位置将其中的关键字分为两部分,左部分包含的关键字放在原结点中,
右部分包含的关键字放到新的结点中,中间位置($\lceil \frac{m}{2} \rceil$)的结点插入到原结点的父结点中。若此时导致其父结点的关键字个
数也超过了上限,则继续进行这种分裂操作,直至这个过程传到根节点为止,这样导致 $B$ 树高度增 $1$。
$B$ 树的删除:因为关键字的个数可能小于 $\lceil \frac{m}{2} \rceil-1$,故涉及合并操作。规则如下:
a. 当被删除的关键字在终端节点。
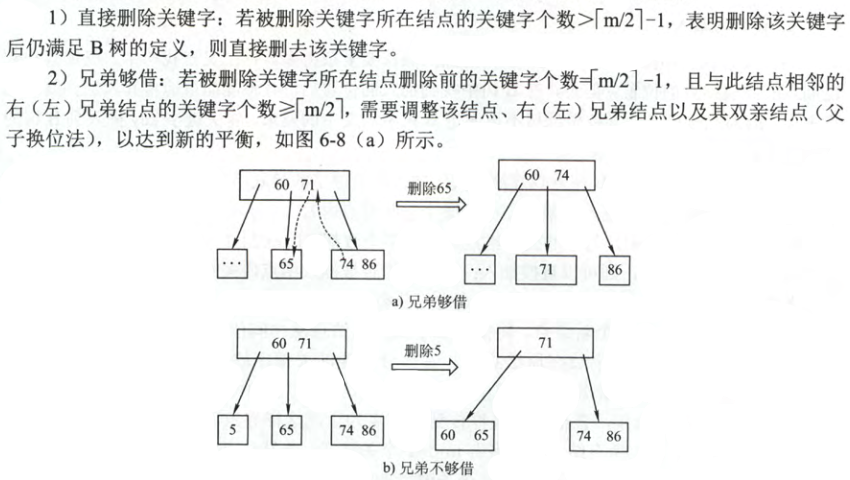

无论是兄弟够借还是兄弟不够借,都要让父节点的一个关键字下来,如果兄弟够借,则让兄弟还父节点一个关键字,否则就不还了,
并且将自身、兄弟节点与借下来的关键字合并。如果没有还父节点一个关键字,此时需要递归判断父节点是否违背了条件。若违反条
件则继续让祖父节点中的关键字先来,然后又是兄弟够不够借的问题。
b. 当被删除的关键字不在终端节点:用需要被删除关键字的前驱关键字或后继关键字替换后,会变成情况 $1$。
找前驱:就是从关键字 $k$ 所在节点的左子树一直往右找。找后继:从关键字 $k$ 所在节点的右子树一直往左找。举个例子:
如下图,要删除的项在非叶子节点上。比如删除关键字 $M$。
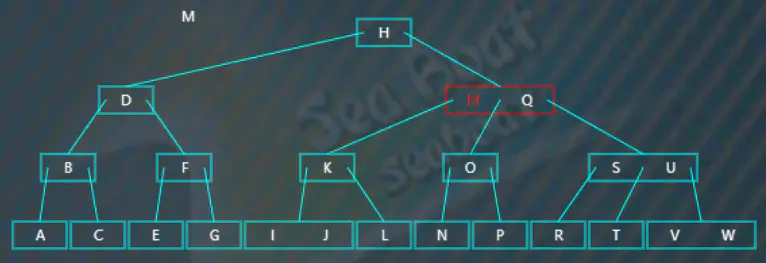
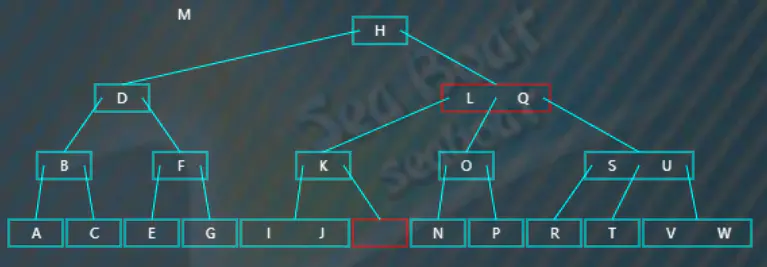
找到对应的中序前驱,从关键字 $M$ 左边的指针指向的左子树开始一直往右走,最终可以找到前驱为 $L$,将 $L,M$ 做个交换,此时 $M$
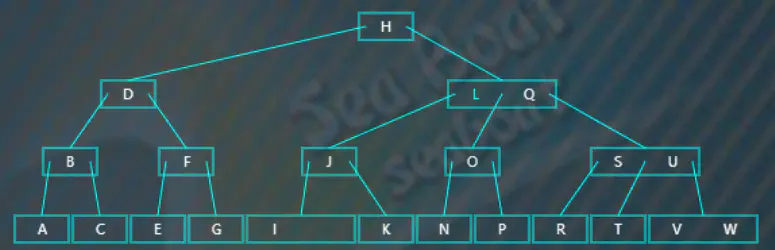
在叶子节点上,删除 $M$,如上右图。删除之后树不平衡,但发现兄弟节点可以借项给它,按照情况 $1$ 进行调整即可,调整后如下图:
$B+$ 树:是应文件系统所需而产生的一种 $B$ 树的变形树。一棵 $m$ 阶的 $B+$ 树和 $m$ 阶的 $B$ 树的异同点在于:
1)每个节点分支数和 $B$ 树一致。
2)$B+$ 树节点内关键字的个数就等于该节点的分支数,而不是如 $B$ 树那样减 $1$。
3)$B+$ 树改进了 $B$ 树, 让内结点只作索引使用, 去掉了其中指向 data record 的指针, 使得每个结点中能够存放更多的 key, 因此能有更大的出度。
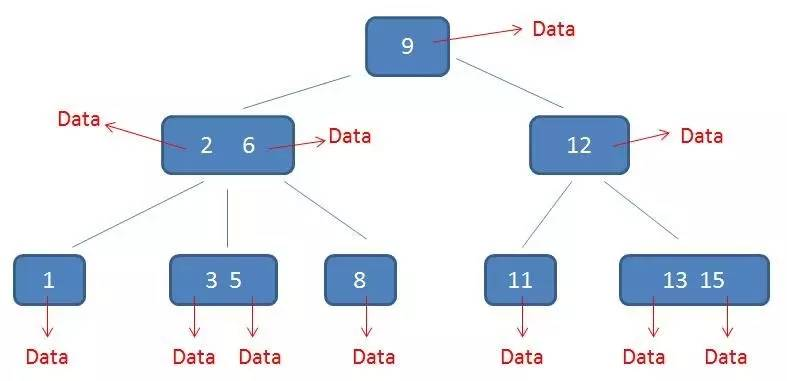
下面左图是 $B$ 树,右图是 $B+$ 树。data 就是文件地址。
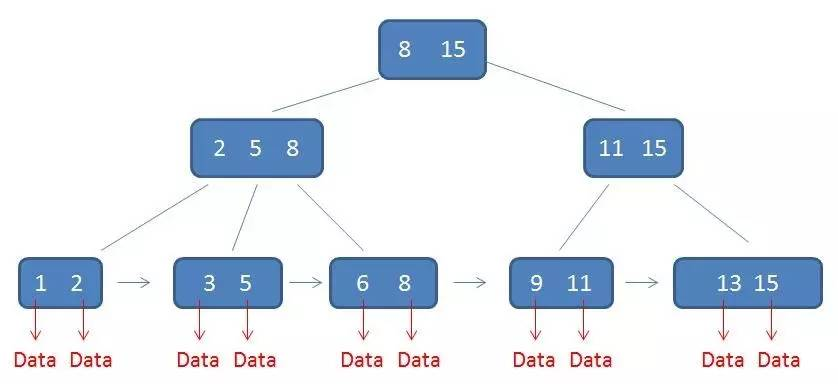
4)所有父节点的元素都同时存在于子节点,是子节点中是最大(或最小)元素。举个例子:
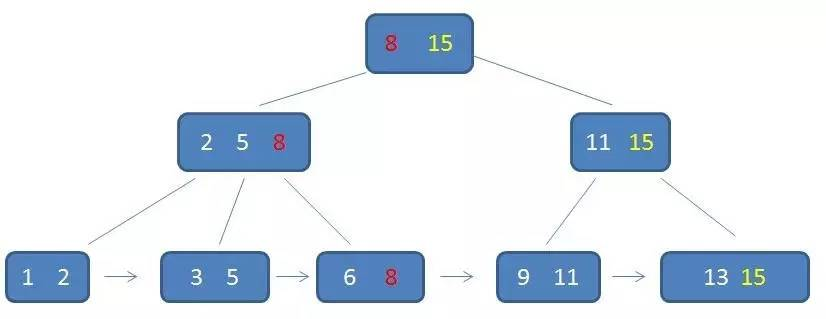
在上面这棵树中,根节点的元素 $8$ 是节点 $2,5,8$ 和 节点 $6,8$ 的最大元素,$15$ 也是一样的。
5)由于 4),所以 $B+$ 树的叶子节点会包含全部的关键字信息,并且每个叶子节点包含指向相应记录的指针,所有叶子节点形成一个链表。
为什么说 $B+$ 树比 $B$ 树更适合实际应用中操作系统的文件索引和数据库索引?
1)$B+$ 树的磁盘读写代价更低:$B+$ 树的内部结点并没有指向关键字具体信息的指针。因此其内部结点相对 $B$ 树更小。如果把所有同一内
部结点的关键字存放在同一盘块中,那么盘块所能容纳的关键字数量也越多。一次性读入内存中的需要查找的关键字也就越多。相对来说
$IO$ 读写次数也就降低了。
2)$B+$ 树的查询效率更加稳定:由于非终结点并不是最终指向文件内容的结点,而只是叶子结点中关键字的索引。所以任何关键字的查找必须
走一条从根结点到叶子结点的路。所有关键字查询的路径长度相同,导致每一个数据的查询效率相当。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号