矩阵相似
相似是研究线性变换矩阵之间的关系,首先需要确定一个线性空间,这是必要的,研究不同线性空间中变换矩阵的关系没啥意义,确
定了线性空间,那么向量的维数,基中向量的个数都被定下来了。
定义:若 $A$ 和 $B$ 都是 $n$ 阶矩阵,如果存在可逆矩阵 $P$,使得 $P^{-1}AP = B$,则称矩阵 $A$ 与 $B$ 相似,记为 $A\sim B$。
理解相似矩阵,得先理解线性变换。
通俗一点来描述相似矩阵:同一个线性变换,不同参考系下的矩阵,称为相似矩阵。
为什么我们需要相似矩阵呢?
对空间中的某一个向量做变换,需要先确定线性空间,并选定一组基来建立坐标系,选择的坐标系越复杂,所做的变换也就越复杂,
计算量也越大,比如,需要将空间中的某一个向量 $\alpha$ 逆时针旋转 $45$ 度,下面是选择的几组参考系:
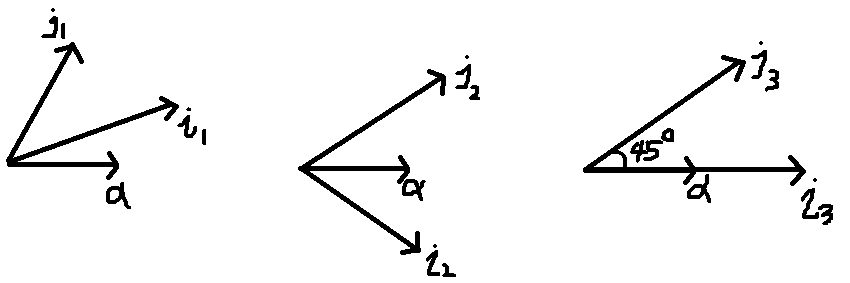
很明显在第三种坐标系,很容易写出向量 $\alpha$ 逆时针旋转 $45$ 度后的坐标。
所以:相似矩阵的目的是为了找到更简单的坐标系来描述变换。
注:如果能选取不同基,使线性变换的矩阵变成对角矩阵,那么,线性变换的形式就会变得相对简单。
建立不同的参考系,逆时针旋转 $45$ 度这个变换的矩阵都不一样,但是它们描述的是同一个线性变换,即本家兄弟,见面不认识,岂不成了笑
话。好在,我们可以找到同一个线性变换的矩阵兄弟们的一个性质,那就是:一定能找到一个非奇异矩阵 $P$,使得
$$P^{-1}AP = B$$
这个 $P$ 就是基 $(i_{1},j_{1})$ 到基 $(i_{2},j_{2})$ 的过渡矩阵,即
$$(i_{2},j_{2}) = (i_{1},j_{1}) \cdot P$$
设向量 $\alpha$ 在基 $i_{1},j_{1}$ 下的坐标为 $v_{1} = (x_{1},y_{1})^{T}$,在基 $i_{2},j_{2}$ 下的坐标为 $v_{2} = (x_{2},y_{2})^{T}$,于是
$$P \cdot v_{2} = v_{1}$$
设逆时针旋转 $45$ 度在基 $i_{1},j_{1}$ 下的变换矩阵为 $A$,在基 $i_{2},j_{2}$ 下的变换矩阵为 $B$,基于两个参考系的坐标变换关系有
$$Av_{1} = PBv_{2}$$
由 $v_{1}$ 和 $v_{2}$ 的关系有
$$APv_{2} = PBv_{2}$$
故
$$P^{-1}AP = B$$
当变换矩阵满足什么样的条件时,可以相似对角化?
设基向量 $(i,j)^{T}$,变换矩阵 $A$,向量 $\alpha = (a,b)$,则
$$A \begin{bmatrix}
i\\
j
\end{bmatrix}(a,b)$$
所以,线性变换其实是先作用于基向量,然后在进行矢量合成,现在我们要找一组基,使得线性变换 $A$ 在这组基的每一个向量上都是伸缩变换。
不妨将要找的这组基记为 $Q$,$Q$ 的参考系仍为 $S$,显然矩阵 $A$ 的特征向量符合条件,同一个线性变换 $A$ 对它自己的特征向量的作用效果
就仅是进行伸缩而不是旋转。
总结一下:相同的线性变换,作用于基向量 $S$ 会发生旋转和伸缩,而作用于基向量 $Q$ 仅会发生伸缩。
现在将 $Q$ 作为参考系($Q$ 不放到 $S$ 中了),找一个矩阵 $B$ 和 $A$ 相似,就是意味着:$B$ 对参考系 $Q$ 的作用效果 $=$ 在参考系 $S$ 中,$A$ 对 $Q$ 的作用效果。
那 $A$ 对 $Q$ 产生了什么效果?伸缩了倍数为对应的特征值,那么要想 $B$ 也有这样的效果,那 $B$ 必然是特征值构成的对角矩阵了。
定理:线性变换矩阵有 $n$ 个线性无关的特征向量 $\Leftrightarrow$ 可相似对角化。
这个怎么理解呢?
设一个变换矩阵 $A$,它所在的参考系为 $S$,$A$ 有 $n$ 个线性无关的特征向量 $\alpha_{1},\alpha_{2},...,\alpha_{n}$,设矩阵 $P$ 为
$$P = [\alpha_{1},\alpha_{2},...,\alpha_{n}] $$
现在我们以这 $n$ 个线性无关的特征向量作为新的基,将 $P$ 作为过渡矩阵,此时变换矩阵 $A$ 相对于新的基变成什么了呢?
设这 $n$ 个特征向量对应的特征值分别为 $\lambda_{1},\lambda_{2},...,\lambda_{n}$,则易知
$$A[\;\alpha_{1},\alpha_{2},...,\alpha_{n}\;] = [\;\lambda_{1}\alpha_{1},\lambda_{2}\alpha_{2},...,\lambda_{n}\alpha_{n}\;] =
[\;\alpha_{1},\alpha_{2},...,\alpha_{n}\;]
\begin{bmatrix}
\lambda_{1} & & & \\
& \lambda_{2} & & \\
& & ... & \\
& & & \lambda_{b}
\end{bmatrix}$$
即在过渡矩阵 $P$ 下,变换 $A$ 变成了
$$P^{-1}AP = \begin{bmatrix}
\lambda_{1} & & & \\
& \lambda_{2} & & \\
& & ... & \\
& & & \lambda_{b}
\end{bmatrix}$$
注:作为基的每个向量的单位长度不一定要相等,比如 $x$ 轴和 $y$ 轴的单位长度也可以不必相等。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号