103-SLM130(NB-IOT)C-SDK(OpenCPU)学习开发-串口
<p><iframe name="ifd" src="https://mnifdv.cn/resource/cnblogs/LearnEC616_SLM130" frameborder="0" scrolling="auto" width="100%" height="1500"></iframe></p>
说明
模组共有3路串口, USART0, USART1, USART2
USART0 (底层默认分配GPIO4,GPIO5),开机时打印开机日志(这是程序内置的,无法屏蔽)

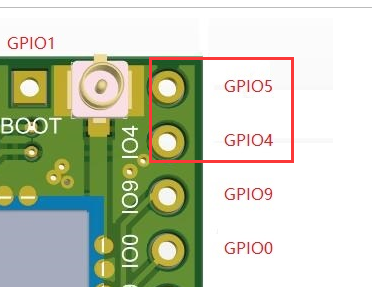

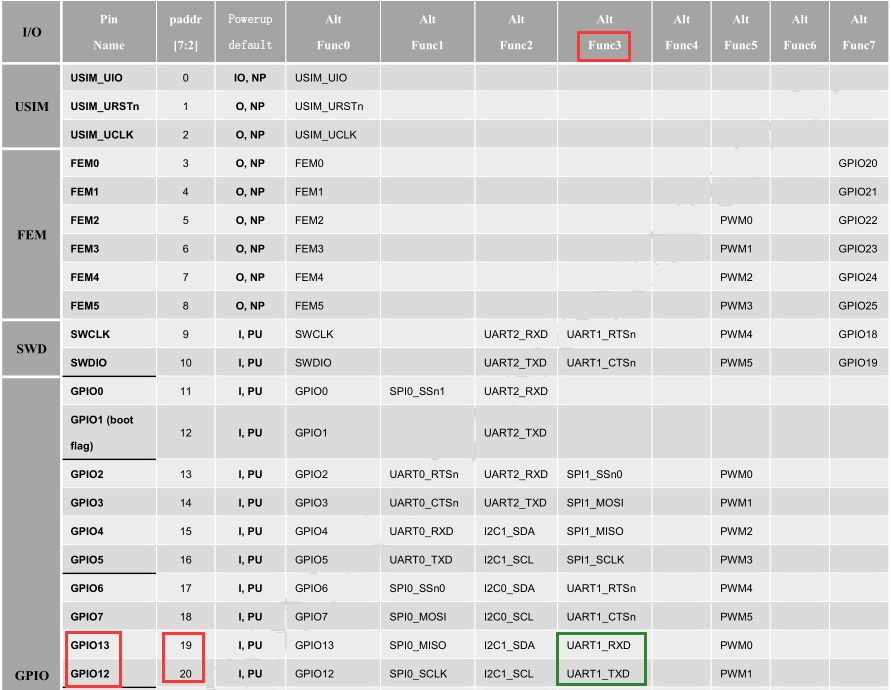
USART1(AT指令默认分配GPIO12,GPIO13)


关于 RTE_Device 文件
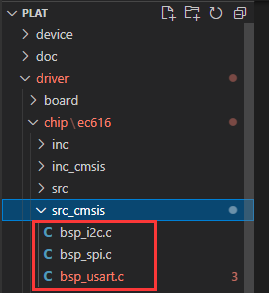
1,工程里面有个 RTE_Device.h 文件
每个工程里面都有这个文件,这个文件是用来配置串口,SPI,IIC的引脚和发送接收模式的

2,配置完以后实际调用配置的是这个文件(了解就可以,咱用不到)
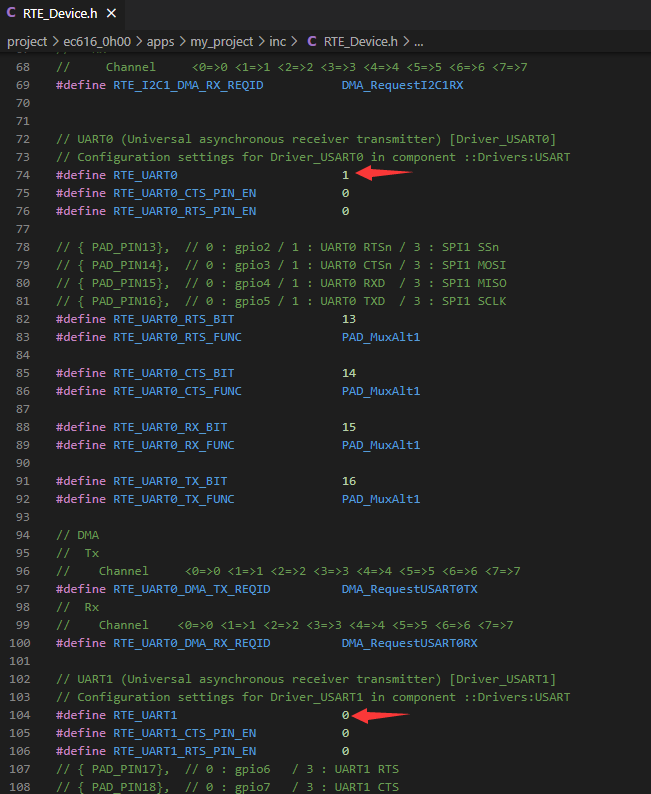
3,这个里面可以选择打开或者关闭, 1代表打开, 0代表关闭
配置串口1接收什么就返回什么
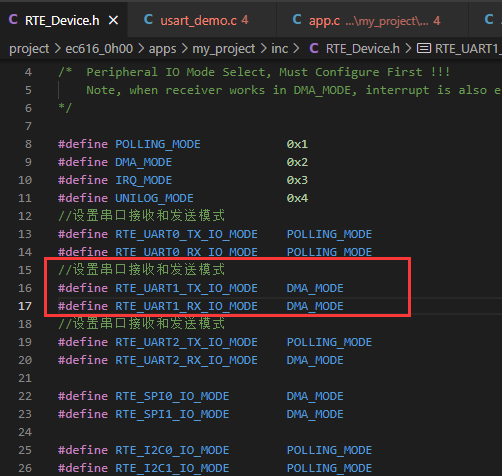
1,发送和接收设置为DMA方式
2,使能串口1,并配置引脚
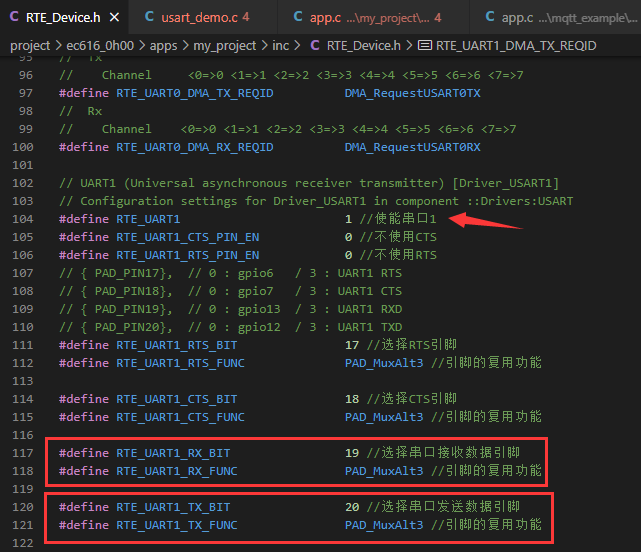
提示: 上面的19,20是写引脚的地址, PAD_MuxAlt3 代表复用其第三功能(就是串口功能)
3,串口1接收什么就返回什么
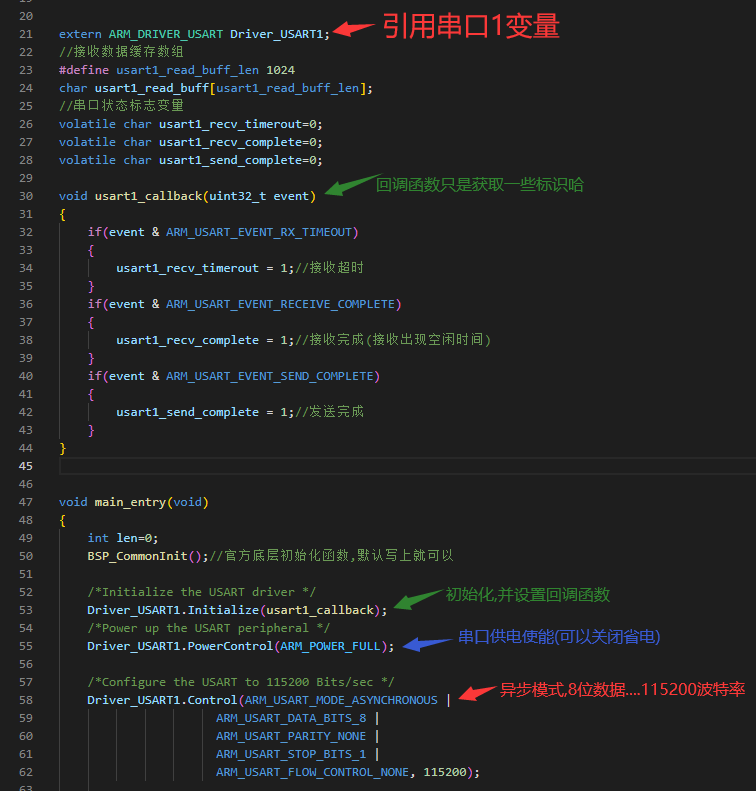
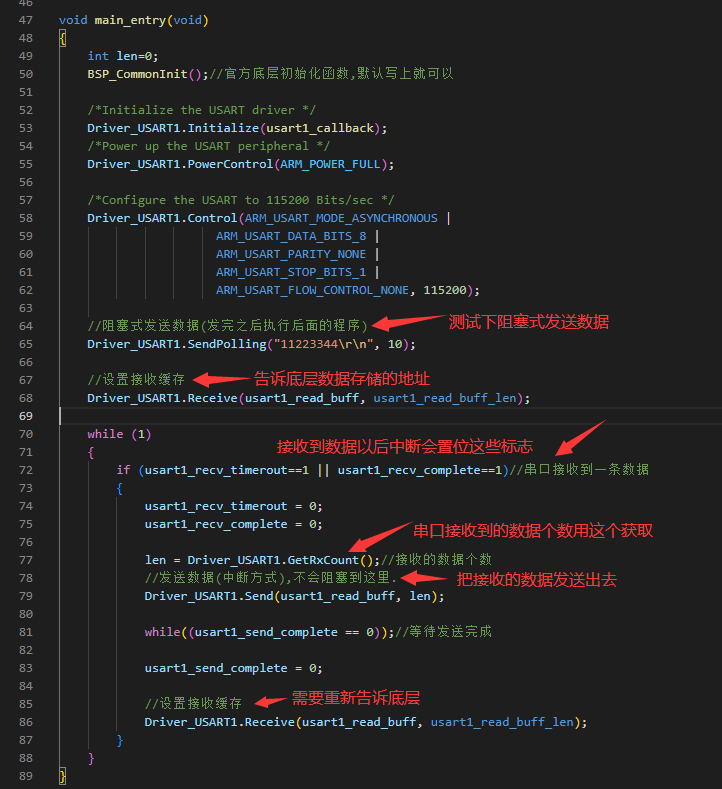
#include <stdio.h> #include "app.h" #include "bsp.h" #include "slpman_ec616.h" #include "bsp_custom.h" #include "pad_ec616.h" #include "gpio_ec616.h" #include "RTE_Device.h" extern ARM_DRIVER_USART Driver_USART1; //接收数据缓存数组 #define usart1_read_buff_len 1024 char usart1_read_buff[usart1_read_buff_len]; //串口状态标志变量 volatile char usart1_recv_timerout=0; volatile char usart1_recv_complete=0; volatile char usart1_send_complete=0; void usart1_callback(uint32_t event) { if(event & ARM_USART_EVENT_RX_TIMEOUT) { usart1_recv_timerout = 1; } if(event & ARM_USART_EVENT_RECEIVE_COMPLETE) { usart1_recv_complete = 1; } if(event & ARM_USART_EVENT_SEND_COMPLETE) { usart1_send_complete = 1; } } void main_entry(void) { int len=0; BSP_CommonInit();//官方底层初始化函数,默认写上就可以 /*Initialize the USART driver */ Driver_USART1.Initialize(usart1_callback); /*Power up the USART peripheral */ Driver_USART1.PowerControl(ARM_POWER_FULL); /*Configure the USART to 115200 Bits/sec */ Driver_USART1.Control(ARM_USART_MODE_ASYNCHRONOUS | ARM_USART_DATA_BITS_8 | ARM_USART_PARITY_NONE | ARM_USART_STOP_BITS_1 | ARM_USART_FLOW_CONTROL_NONE, 115200); //阻塞式发送数据(发完之后执行后面的程序) Driver_USART1.SendPolling("11223344\r\n", 10); //设置接收缓存 Driver_USART1.Receive(usart1_read_buff, usart1_read_buff_len); while (1) { if (usart1_recv_timerout==1 || usart1_recv_complete==1)//串口接收到一条数据 { usart1_recv_timerout = 0; usart1_recv_complete = 0; len = Driver_USART1.GetRxCount();//接收的数据个数 //发送数据(中断方式),不会阻塞到这里. Driver_USART1.Send(usart1_read_buff, len); while((usart1_send_complete == 0));//等待发送完成 usart1_send_complete = 0; //设置接收缓存 Driver_USART1.Receive(usart1_read_buff, usart1_read_buff_len); } } }
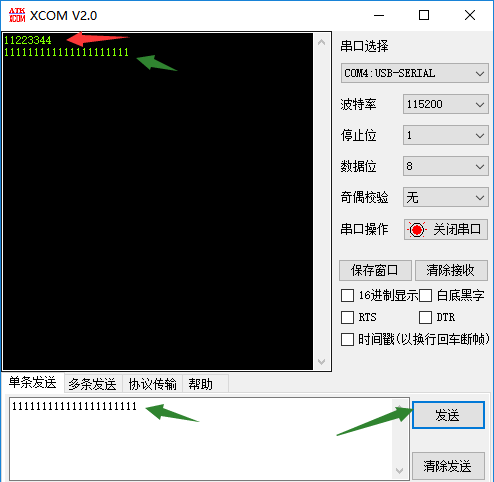
4,测试
5,程序说明
提示: 如果是调用的中断发送数据,实际上只是把发送数据的地址和数据个数告诉了底层
底层呢会打开发送中断, 然后就接着执行程序了. 要注意下面的方式是不行的
Driver_USART1.Send("00000000", 8);
Driver_USART1.Send("11111111", 8);
调用完第一个发送,接着调用第二个发送,其实第一个还没执行呢,
最终是把第二个的地址发给了底层.
所以程序上我写了等待发送完成
while((usart1_send_complete == 0));//等待发送完成
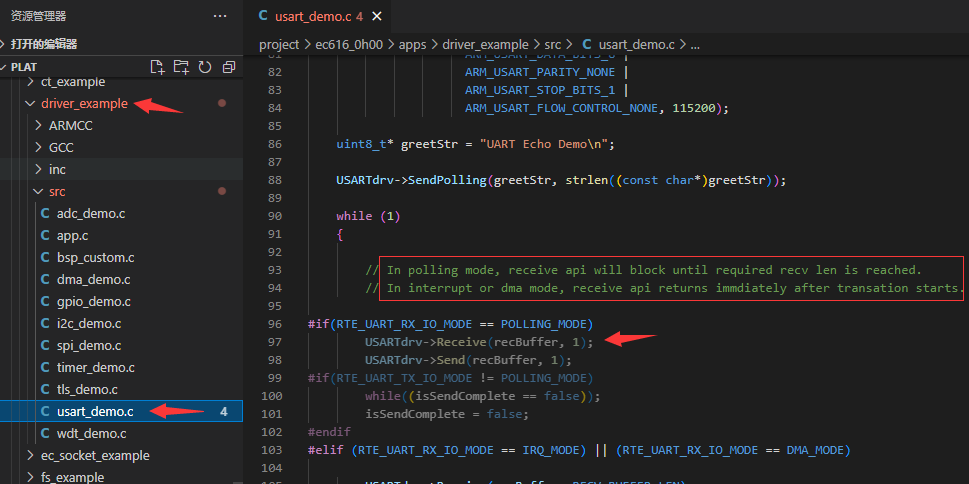
关于POLLING模式(官方有例程)
这个模式下就是 Receive(接收数据的地址, 需要接收的个数);
一直等到接收到足够的数据个数再往下执行


 浙公网安备 33010602011771号
浙公网安备 33010602011771号
