104-CH32V307(WCH单片机)学习开发-串口
<p><iframe name="ifd" src="https://mnifdv.cn/resource/cnblogs/LearnCH32V307VCT6" frameborder="0" scrolling="auto" width="100%" height="1500"></iframe></p>
串口1
void uart_init(u32 bound1){ GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO , ENABLE); //USART1_TX GPIOA.9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); //USART1_RX GPIOA.10初始化 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); //USART 初始化设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_InitStructure.USART_BaudRate = bound1;//串口波特率 USART_Init(USART1, &USART_InitStructure); //初始化串口1 /*中断优先级配置*/ NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(USART1, ENABLE); //使能串口 } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void USART1_IRQHandler(void) { u8 Res; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(USART1); //读取接收到的数据 } }
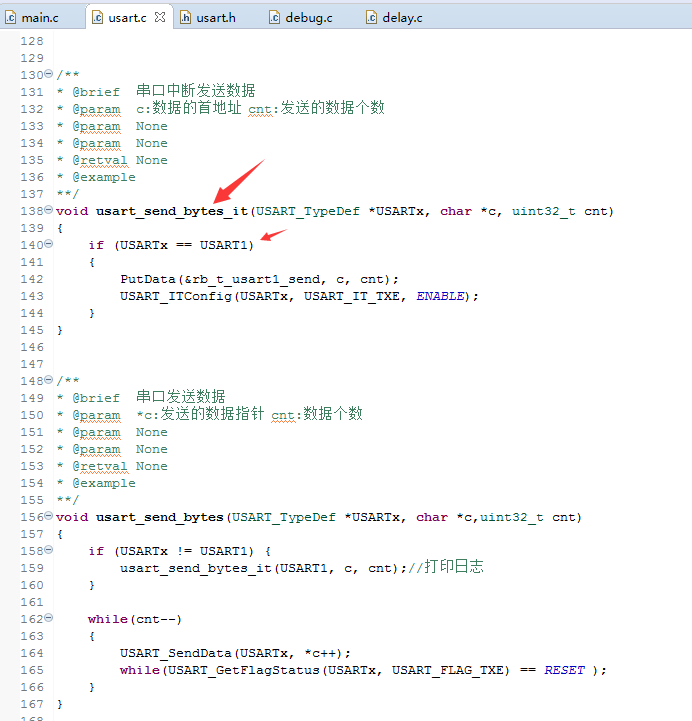
串口发送数据
void usart_send_bytes(USART_TypeDef *USARTx, char *c,uint32_t cnt) { while(cnt--) { USART_SendData(USARTx, *c++); while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET ); } } usart_send_bytes(USART1, "11223344", 4);//发送数据
串口1,2,3
void uart_init(u32 bound1,u32 bound2,u32 bound3){ GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_USART3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO , ENABLE); //串口引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); //串口引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); //串口引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOB, &GPIO_InitStructure); //USART 初始化设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_InitStructure.USART_BaudRate = bound1;//串口波特率 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_InitStructure.USART_BaudRate = bound2;//串口波特率 USART_Init(USART2, &USART_InitStructure); //初始化串口2 USART_InitStructure.USART_BaudRate = bound3;//串口波特率 USART_Init(USART3, &USART_InitStructure); //初始化串口3 /*串口--1*/ NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 /*串口--2*/ NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 /*串口--3*/ NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(USART1, ENABLE); //使能串口 USART_Cmd(USART2, ENABLE); //使能串口 USART_Cmd(USART3, ENABLE); //使能串口 } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void USART1_IRQHandler(void) { u8 Res; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(USART1); //读取接收到的数据 } } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void USART2_IRQHandler(void) { u8 Res; if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(USART2); //读取接收到的数据 } } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void USART3_IRQHandler(void) { u8 Res; if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(USART3); //读取接收到的数据 } }
串口4
void uart_init(u32 bound4){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_USART3|RCC_APB1Periph_UART4, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO , ENABLE); //串口引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOC, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOC, &GPIO_InitStructure); //USART 初始化设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_InitStructure.USART_BaudRate = bound4;//串口波特率 USART_Init(UART4, &USART_InitStructure); //初始化串口 /*串口--4*/ NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(UART4, ENABLE); //使能串口 } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void UART4_IRQHandler(void) { u8 Res; if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(UART4); //读取接收到的数据 USART_SendData(UART4, Res);//返回接收的数据 } }
串口5
void uart_init(u32 bound5){ //GPIO端口设置 GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB1Periph_USART3|RCC_APB1Periph_UART4|RCC_APB1Periph_UART5, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD|RCC_APB2Periph_USART1|RCC_APB2Periph_AFIO , ENABLE); //串口引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOC, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOD, &GPIO_InitStructure); //USART 初始化设置 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_InitStructure.USART_BaudRate = bound5;//串口波特率 USART_Init(UART5, &USART_InitStructure); //初始化串口 /*串口--5*/ NVIC_InitStructure.NVIC_IRQChannel = UART5_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); USART_ITConfig(UART5, USART_IT_RXNE, ENABLE);//开启串口接受中断 USART_Cmd(UART5, ENABLE); //使能串口 } //串口中断服务程序 __attribute__((interrupt("WCH-Interrupt-fast"))) void UART5_IRQHandler(void) { u8 Res; if(USART_GetITStatus(UART5, USART_IT_RXNE) != RESET) { Res =USART_ReceiveData(UART5); //读取接收到的数据 USART_SendData(UART5, Res); } }
串口6,7,8根据串口4,5修改就可以
TX , RX
串口6(PC0, PC1)
串口7(PC2, PC3)
串口8(PC4, PC5)
我提供了一套标准的数据处理方案

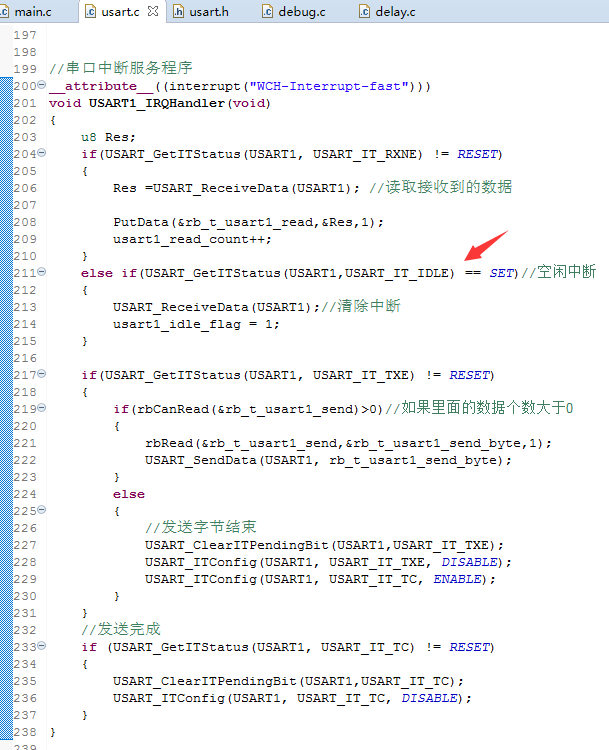
1,提供的例程是串口1和串口2接收到什么数据就返回什么数据

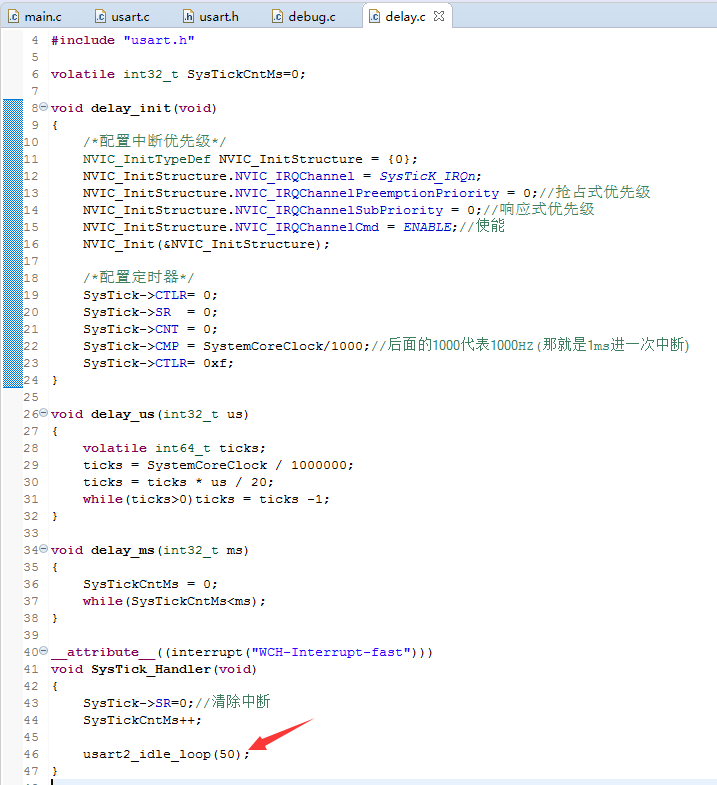
2,我这边自己实现了延时函数,所以把官方的屏蔽了

3,printf我这边也改了(中断发送,不会阻塞)

4,串口1和串口2接收数据都是使用环形队列接收


4,串口1判断接收完一条数据使用的是自带的空闲中断
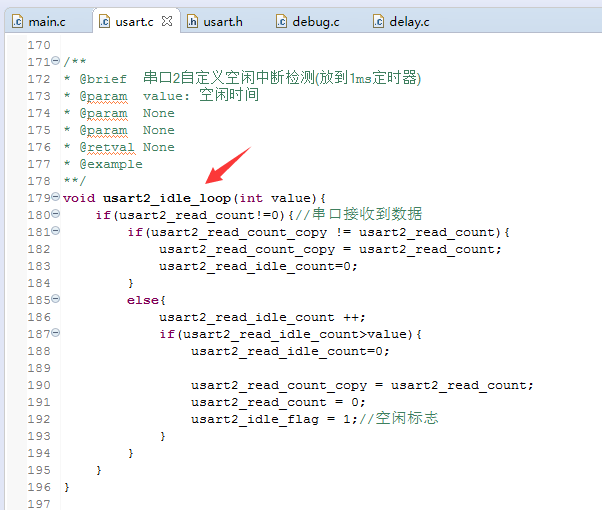
5,串口2判断接收完一条数据是使用定时器自定义的空闲时间
6,串口1发送数据可以使用中断方式


 浙公网安备 33010602011771号
浙公网安备 33010602011771号
