

ESP8266 SDK开发: 外设篇-SPI
SPI引脚
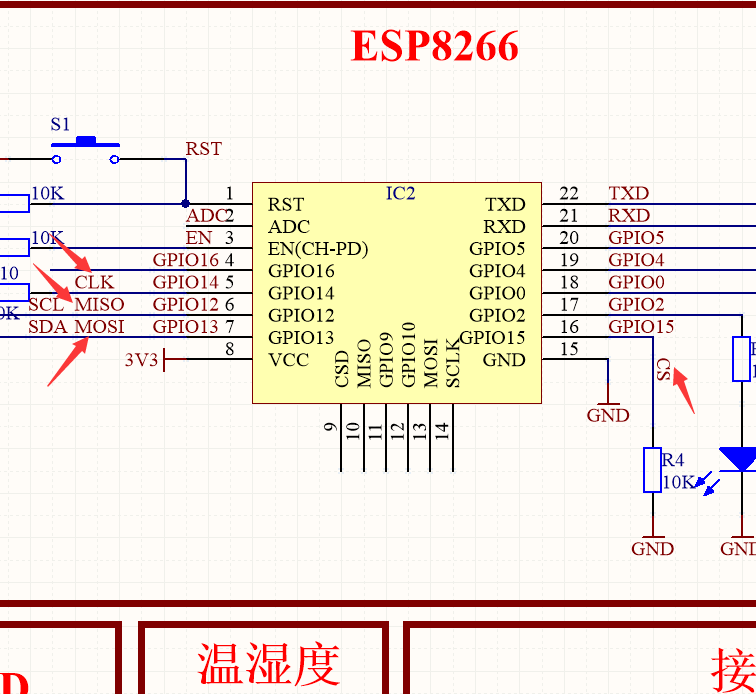
上程序
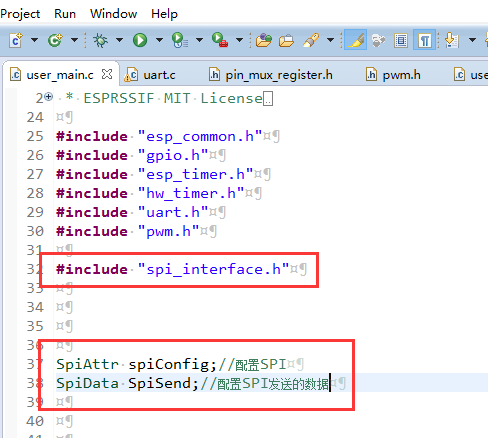
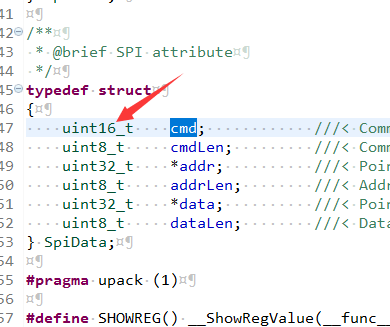
#include "spi_interface.h" SpiAttr spiConfig;//配置SPI SpiData SpiSend;//配置SPI发送的数据
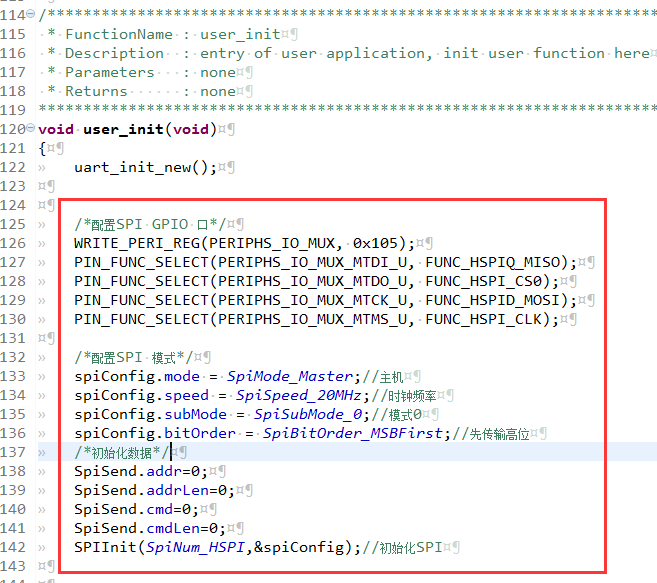
2.配置GPIO,设置为主机模式
3.关于发送数据
首先大家不要被官方规定的发送的几种数据所迷惑
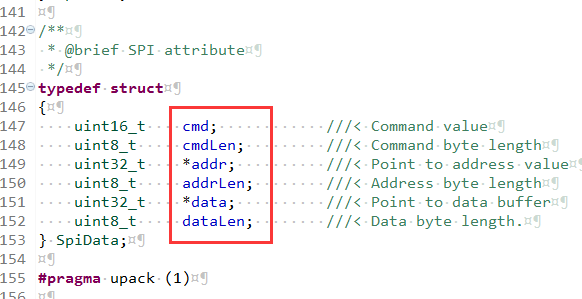
你要明白,无论是啥命令,地址,数据
都是用SPI发送数据而已
你要是这都不明白....说明你已经被协议弄糊涂了
其实对于通信而言你需要把大的方向搞明白
什么叫:通信方式 (SPI,串口)
什么叫:通信协议 (在通信方式基础上规定的数据协议)
之所以有命令,地址,和数据之分,其实是咱和某个支持SPI的芯片通信的时候
如果想读取SPI芯片某个寄存器里面的值
你需要先用SPI发送发送读命令(告诉芯片我要读数据)
然后用SPI发送要读取的地址
然后另一个芯片就返回过来数据了
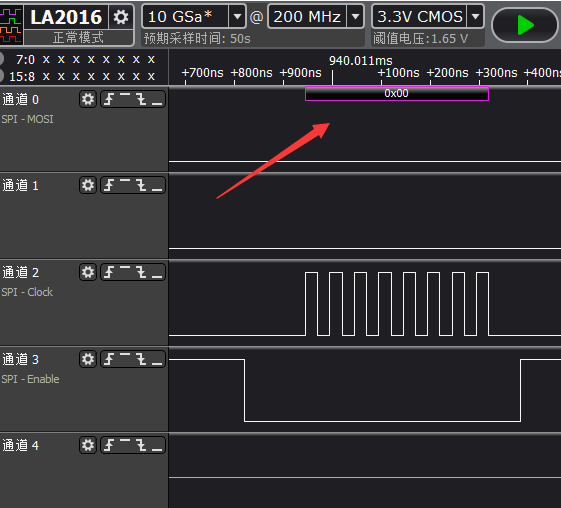
3.发送一个字节数据
用cmd测试
为了方便我监控数据,使用了一个1S的硬件定时器
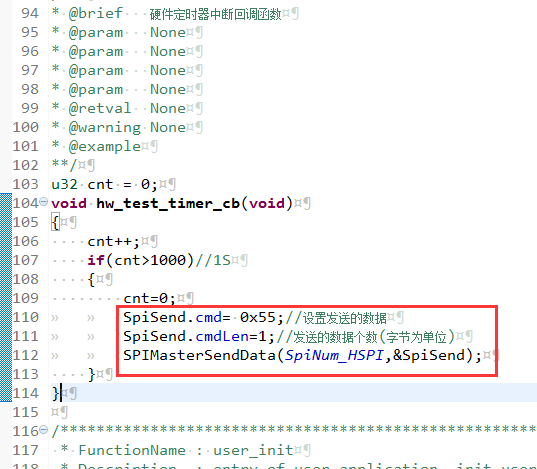
SpiSend.cmd= 0x55;//设置发送的数据 SpiSend.cmdLen=1;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据
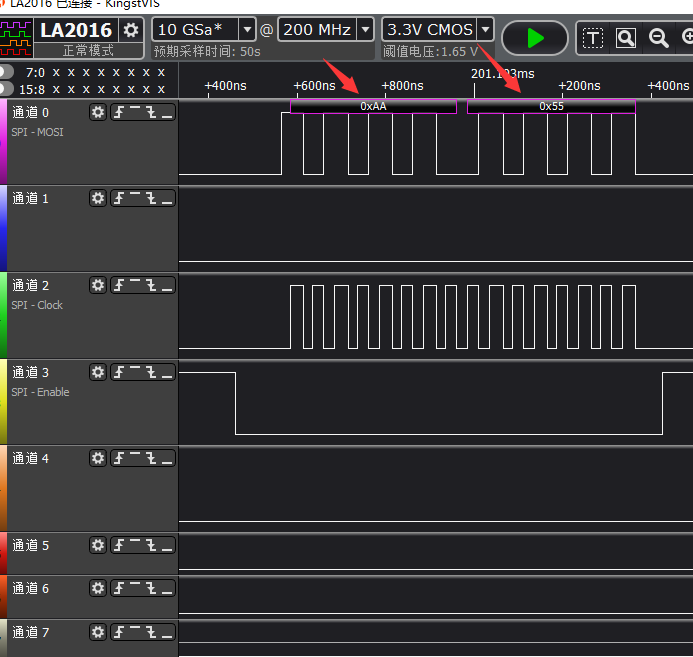
监控如下

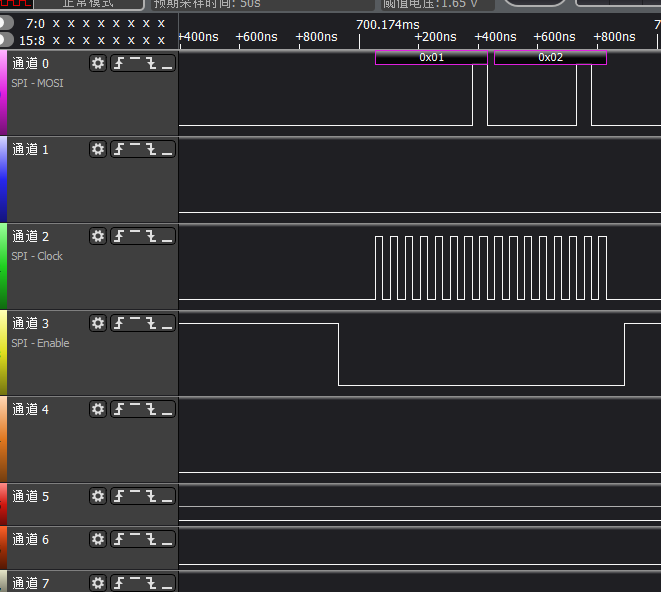
4.发送两个字节数据
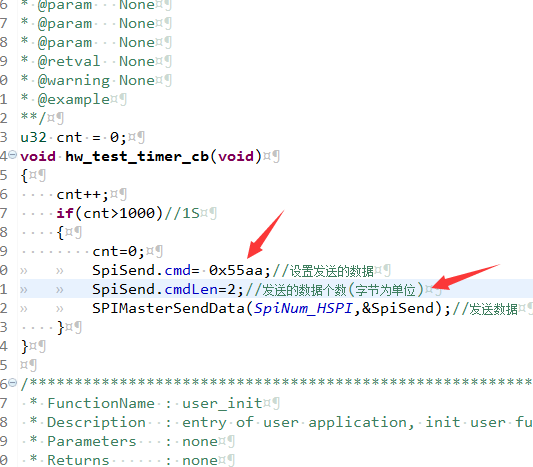
SpiSend.cmd= 0x55aa;//设置发送的数据 SpiSend.cmdLen=2;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据
测试如下
先传的0xaa 后传输的 0x55
用户实际应用的时候要注意!
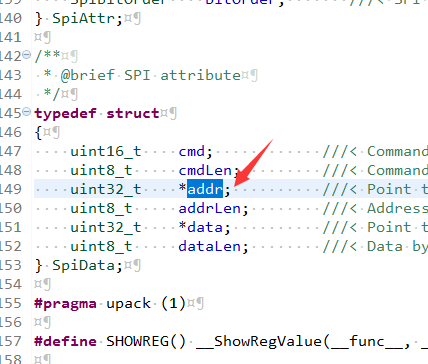
5.再看一下 addr
addr最大可以传输一个32位的数据(4字节)
5.1 注意下下面的情况

测试如下:
注意:
其实实际上设置为传输1位的时候芯片内部默认先取addr数据地址的 低八位
uint32_t data = 0x01;
实际上 data = 0x01000000
传输数据的时候芯片先取的最后面的00
使用addr传输的1位数据的时候需要注意
注意:
注意:
注意:
使用 addr 只要是不传输4位数据
芯片内部都会默认先传低八位
使用 addr 无论是只要是不传输4位数据
芯片内部都会默认先传低八位
使用 addr 无论是只要是不传输4位数据
芯片内部都会默认先传低八位
下面看用addr传输4位数据
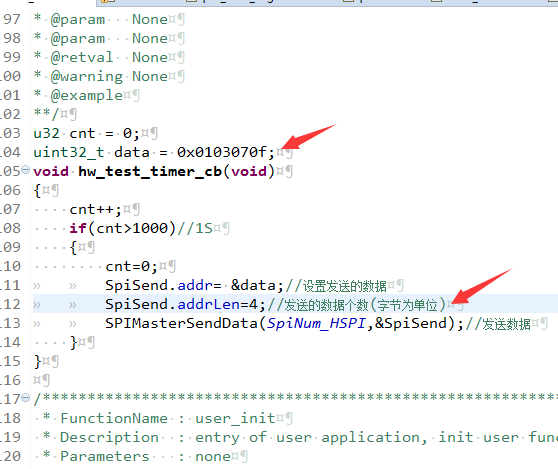

u32 cnt = 0; uint32_t data = 0x0103070f; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.addr= &data;//设置发送的数据 SpiSend.addrLen=4;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
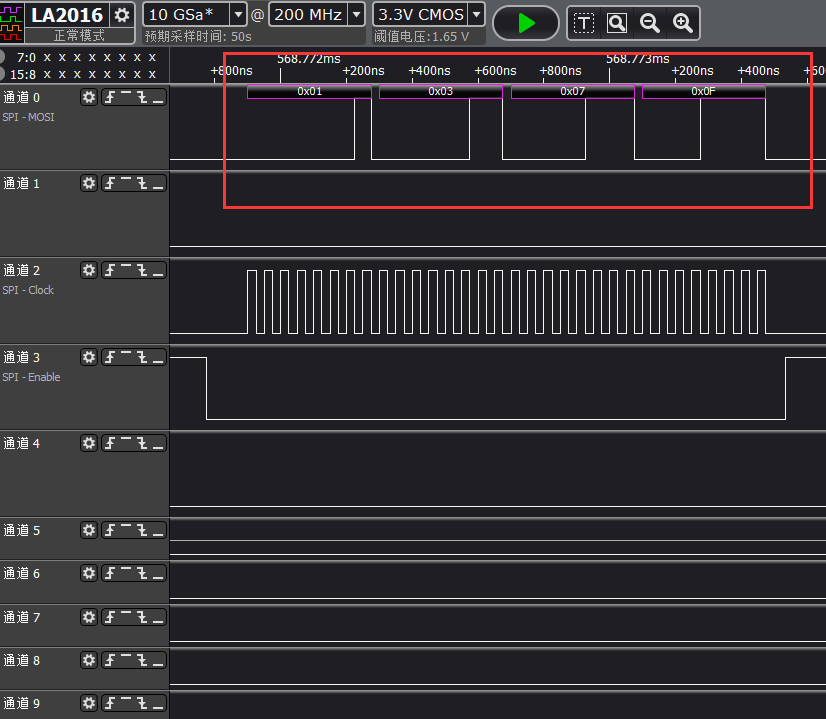
测试如下:
正好传输4位数据的时候,芯片内部默认先传输高八位
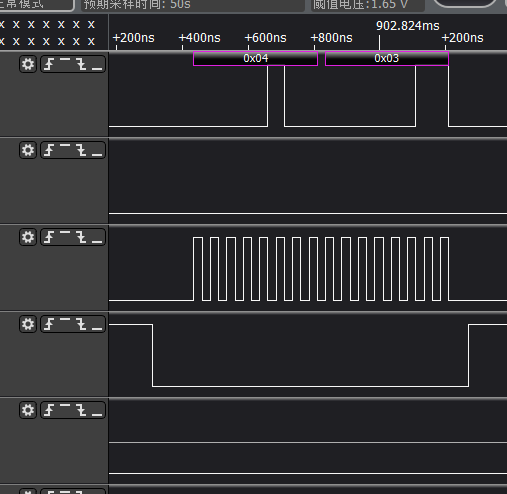
5.2 传输一个u8型4字节的数组,传输个数是2字节
芯片默认是先传输数组后面的数据,依次向前
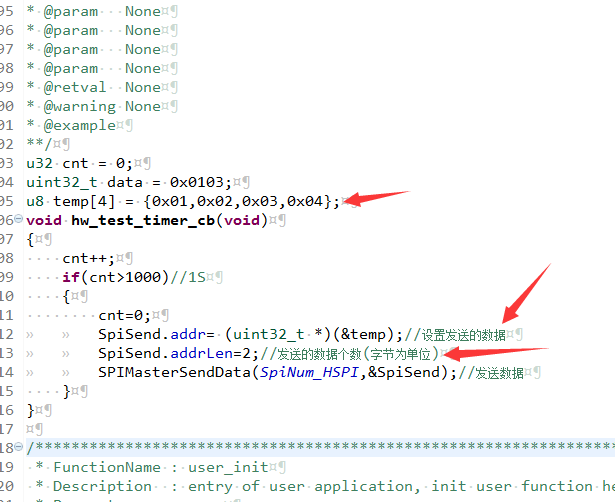
u8 temp[4] = {0x01,0x02,0x03,0x04}; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.addr= (uint32_t *)(&temp);//设置发送的数据 SpiSend.addrLen=2;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
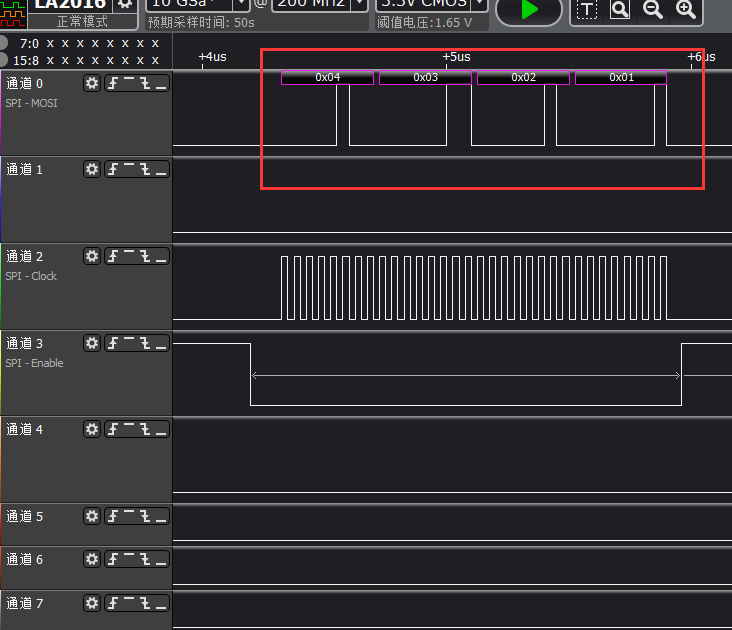
5.3 传输一个u8型4字节的数组,如果传输个数是4字节
芯片也会先传输数组后面的数据,依次向前
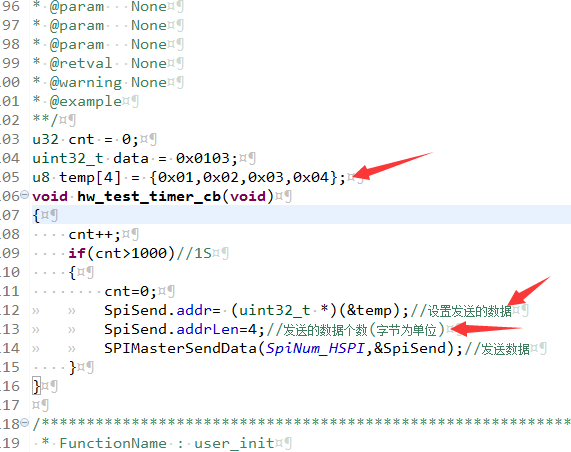
u8 temp[4] = {0x01,0x02,0x03,0x04}; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.addr= (uint32_t *)(&temp);//设置发送的数据 SpiSend.addrLen=2;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
以上为 使用addr 传输数据时需要注意的地方
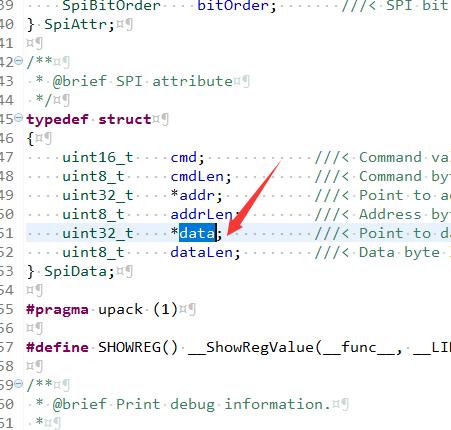
6 现在看一下 data
只要记住一点即可
data 和 上面的 addr 传输的时候取数据的方式完全相反
data就不再多加测试:用户只需要记住上面的话即可!
由此便推导出使用data应该会怎么传输
我想官方这样做是为了应对客户不同的传输数据情况!
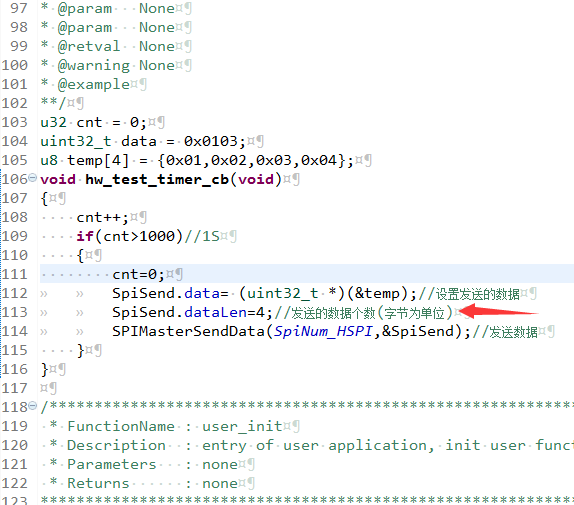
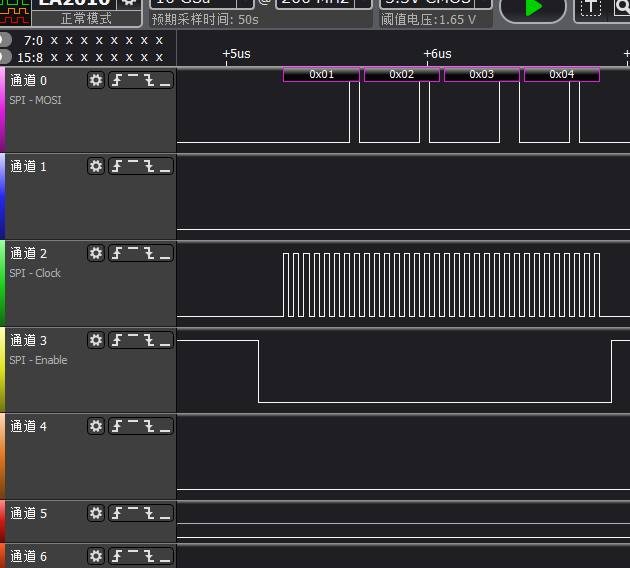
6.1 测试使用data ,u8型数组传输2字节的情况

u8 temp[4] = {0x01,0x02,0x03,0x04}; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.data= (uint32_t *)(&temp);//设置发送的数据 SpiSend.dataLen=2;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
测试如下:
和addr完全相反,data是先传输数组前面的数据
6.2 测试使用data ,u8型数组传输4字节的情况
u8 temp[4] = {0x01,0x02,0x03,0x04}; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.data= (uint32_t *)(&temp);//设置发送的数据 SpiSend.dataLen=4;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
测试如下:
关于组合起来
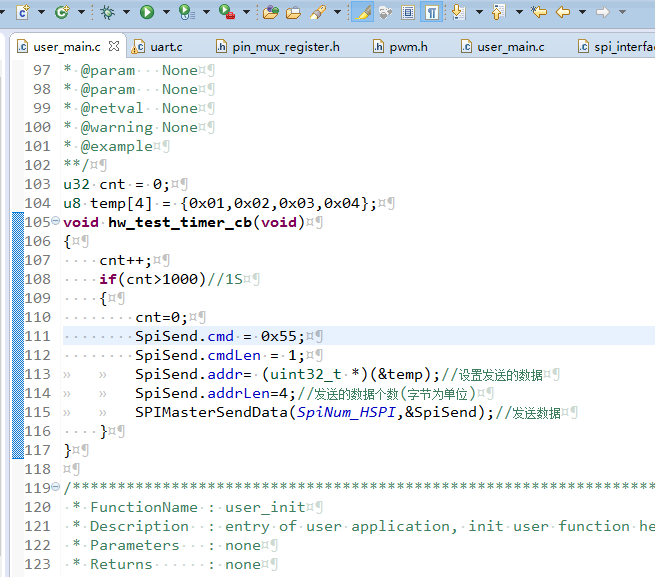
u32 cnt = 0; u8 temp[4] = {0x01,0x02,0x03,0x04}; void hw_test_timer_cb(void) { cnt++; if(cnt>1000)//1S { cnt=0; SpiSend.cmd = 0x55; SpiSend.cmdLen = 1; SpiSend.addr= (uint32_t *)(&temp);//设置发送的数据 SpiSend.addrLen=4;//发送的数据个数(字节为单位) SPIMasterSendData(SpiNum_HSPI,&SpiSend);//发送数据 } }
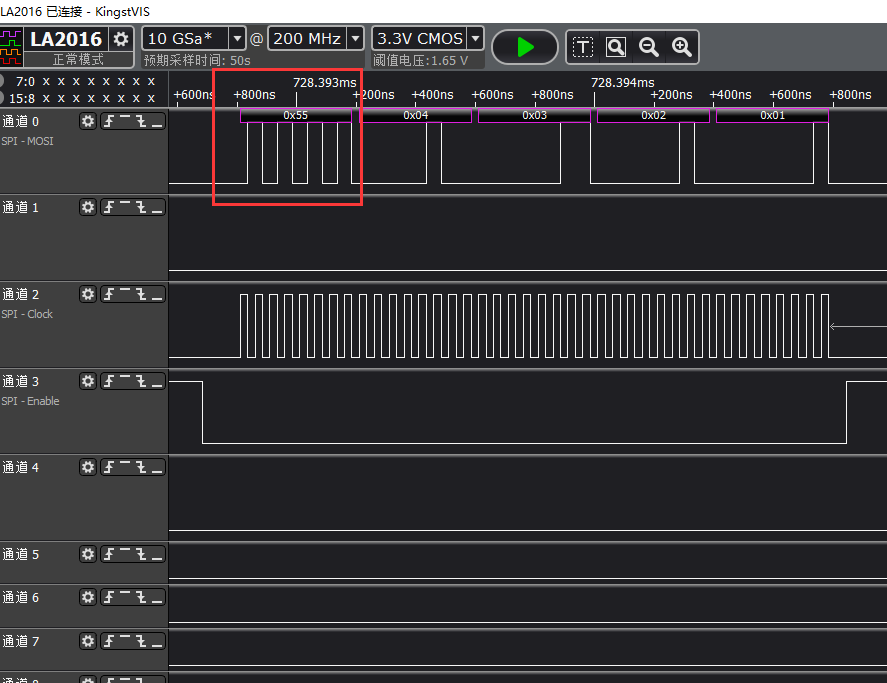
测试如下:
总结:
cmd,addr,data的数据该怎么传还是怎么传
但是是先传 cmd 然后 addr 最后 data
如果想SPI发送数据的时候接收数据
SPIMasterRecvData(SpiNum spiNum, SpiData* pOutData)

史上最短的引脚模拟SPI
/** * @brief SPI函数 * @param value--发送的数据 * @param None * @param None * @retval SPI接收的数据 * @example **/ unsigned char SPIWriteRead(unsigned char value) { unsigned char i=0,temp=0; SPI_CLK = 0;//进入之前其实是高电平 if(SPI_MISO)temp|=0x80;//接收数据 for(i=0;i<8;i++) { SPI_MOSI=value&(0x80>>i);//准备数据 SPI_CLK=1; SPI_CLK = 0; if(i<7)if(SPI_MISO)temp|=0x80>>(i+1);//接收数据 } return temp; }
源码在默认最大是20M
按照规律修改为其它频率
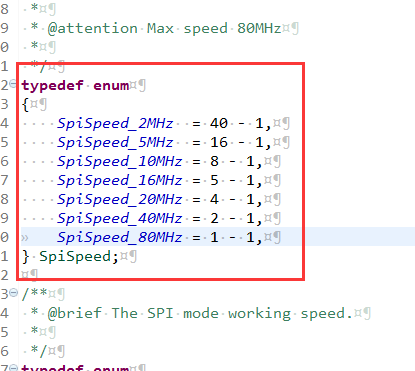
typedef enum { SpiSpeed_2MHz = 40 - 1, SpiSpeed_5MHz = 16 - 1, SpiSpeed_10MHz = 8 - 1, SpiSpeed_16MHz = 5 - 1, SpiSpeed_20MHz = 4 - 1, SpiSpeed_40MHz = 2 - 1, SpiSpeed_80MHz = 1 - 1, } SpiSpeed;
NONOS_SDK版本区别
#include "driver/spi_interface.h"
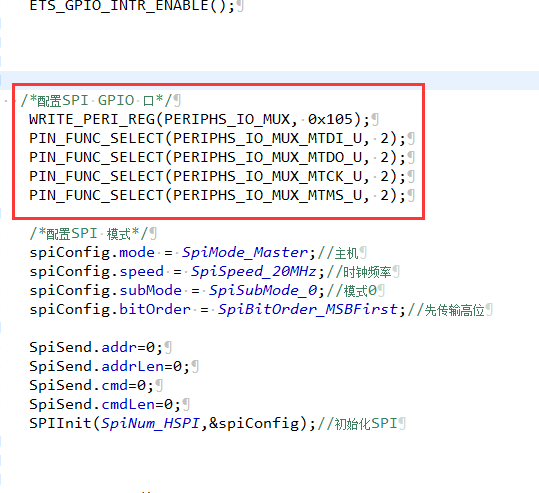
/*配置SPI GPIO 口*/ WRITE_PERI_REG(PERIPHS_IO_MUX, 0x105); PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTDI_U, 2); PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTDO_U, 2); PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTCK_U, 2); PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTMS_U, 2); /*配置SPI 模式*/ spiConfig.mode = SpiMode_Master;//主机 spiConfig.speed = SpiSpeed_20MHz;//时钟频率 spiConfig.subMode = SpiSubMode_0;//模式0 spiConfig.bitOrder = SpiBitOrder_MSBFirst;//先传输高位 SpiSend.addr=0; SpiSend.addrLen=0; SpiSend.cmd=0; SpiSend.cmdLen=0; SPIInit(SpiNum_HSPI,&spiConfig);//初始化SPI
其它频率
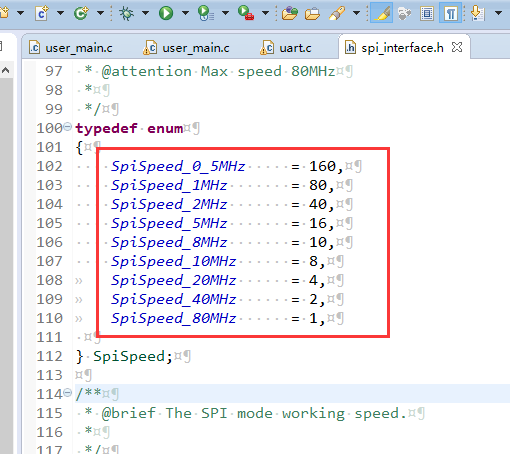
typedef enum { SpiSpeed_0_5MHz = 160, SpiSpeed_1MHz = 80, SpiSpeed_2MHz = 40, SpiSpeed_5MHz = 16, SpiSpeed_8MHz = 10, SpiSpeed_10MHz = 8, SpiSpeed_20MHz = 4, SpiSpeed_40MHz = 2, SpiSpeed_80MHz = 1, } SpiSpeed;






【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 通过 API 将Deepseek响应流式内容输出到前端
· AI Agent开发,如何调用三方的API Function,是通过提示词来发起调用的吗
2019-03-01 5-STM32物联网开发WIFI(ESP8266)+GPRS(Air202)系统方案升级篇(,远程升级GPRS内部程序)