


北-东-地坐标系下的低精度的SINS/GPS组合导航系统中初始航向对准技术
推导了一篇严恭敏老师的论文《低精度的SINS/GPS组合导航系统中初始航向对准技术》
主要思想:为了降低航向的非线性,直接估计 sin(航向) 和 cos(航向)
文中仿真了两种场景:
场景1:初始速度:0m/s,加速度:1m/s^2,GPS水平定位精度:10m;
场景2:初始速度:10m/s,拐弯半径为100m,GPS水平定位精度:10m。
仿真结果:20s航向可以收敛到3°。
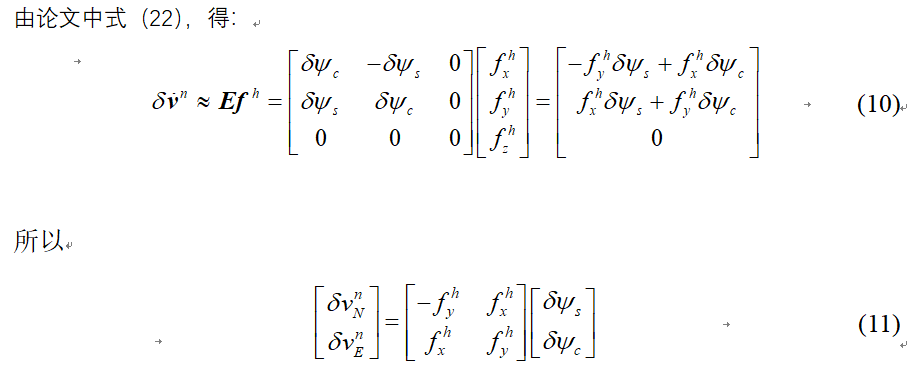
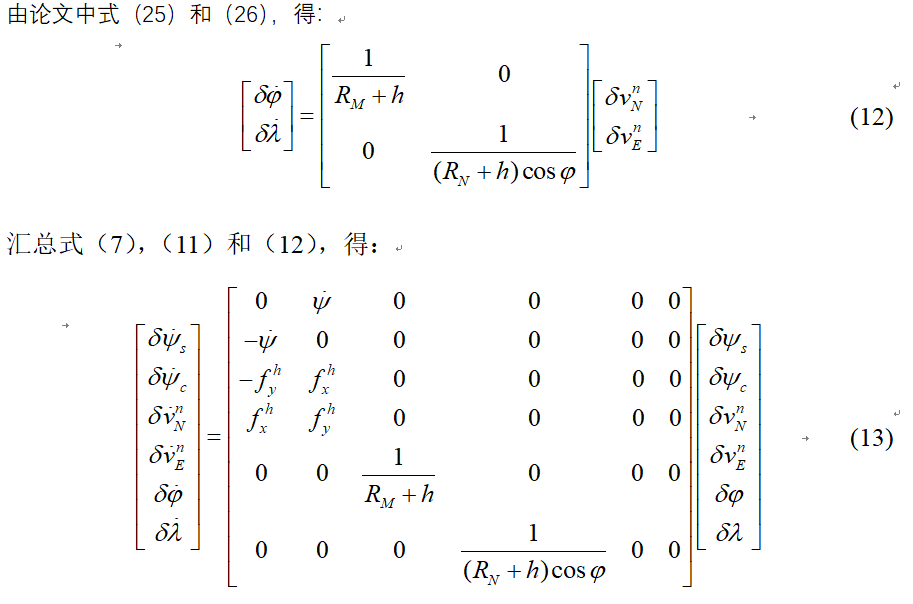
注:从公式中状态系数阵看,必须保证水平加速度不为零,才能估计出航向
因为我习惯用北-东-地坐标系,所以本博文在北-东-地坐标系下推导,下面是推导细节:
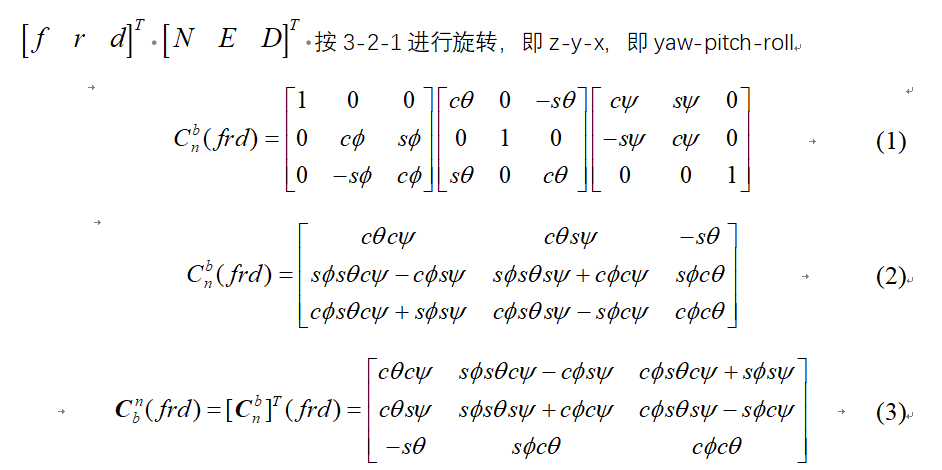
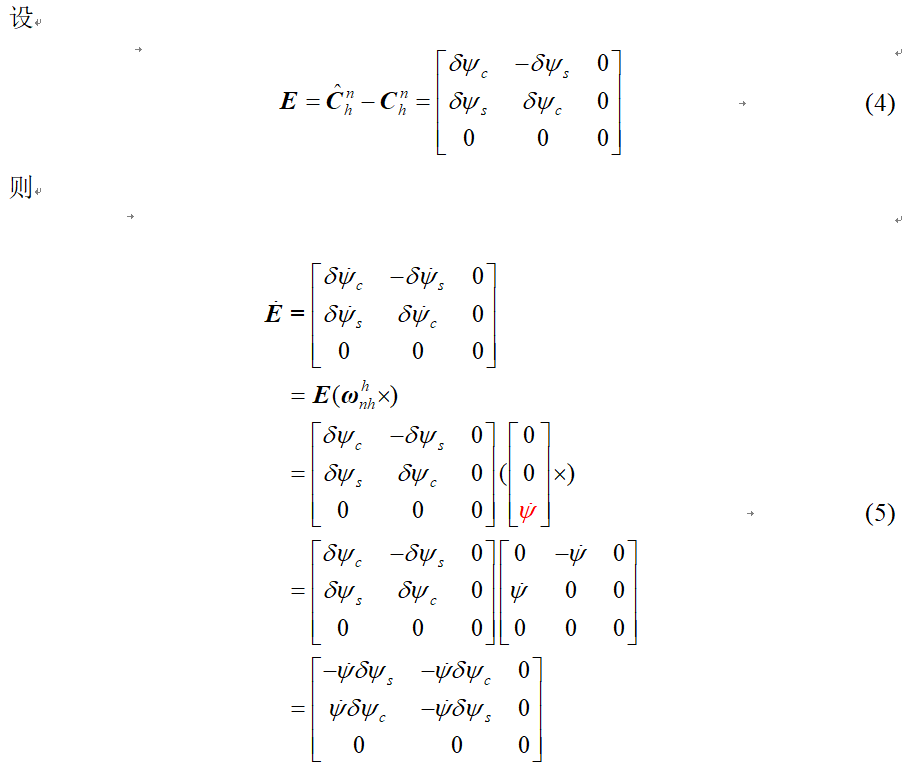

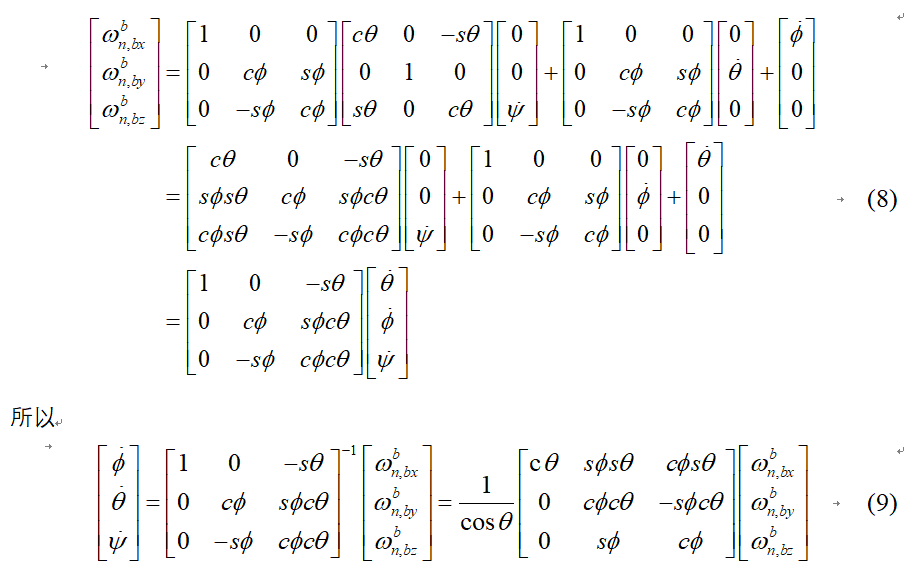
下面推导欧拉角微分方程,并得出航向微分方程:
参考:
[1]严恭敏,秦永元.低精度的SINS/GPS组合导航系统中初始航向对准技术(英文)[J].传感技术学报,2007,(01):237-241.
[2]CSDN: 大失准角下的滤波方程.

