第五章设备管理
1.I/O设备的基本概念和分类
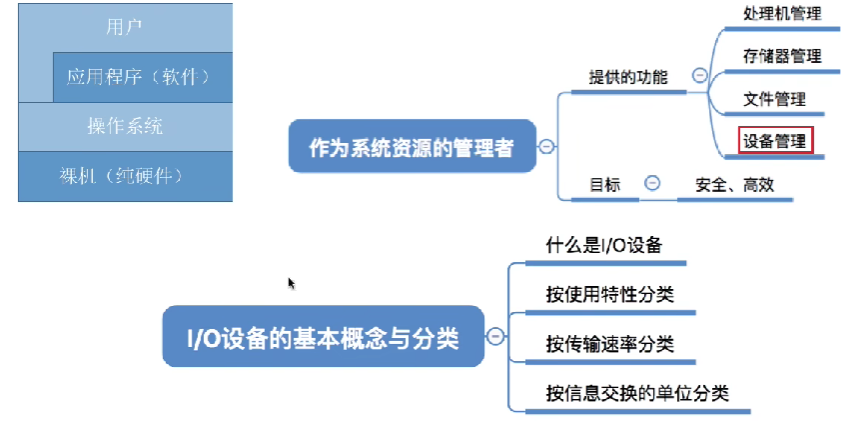
1.1什么是I/O设备
“I/o”就是“输入/输出”(Input/Output)
I/o设备就是可以将数据输入到计算机,或者可以接收计算机输出数据的外部设备,属于计算机中的硬件部件。
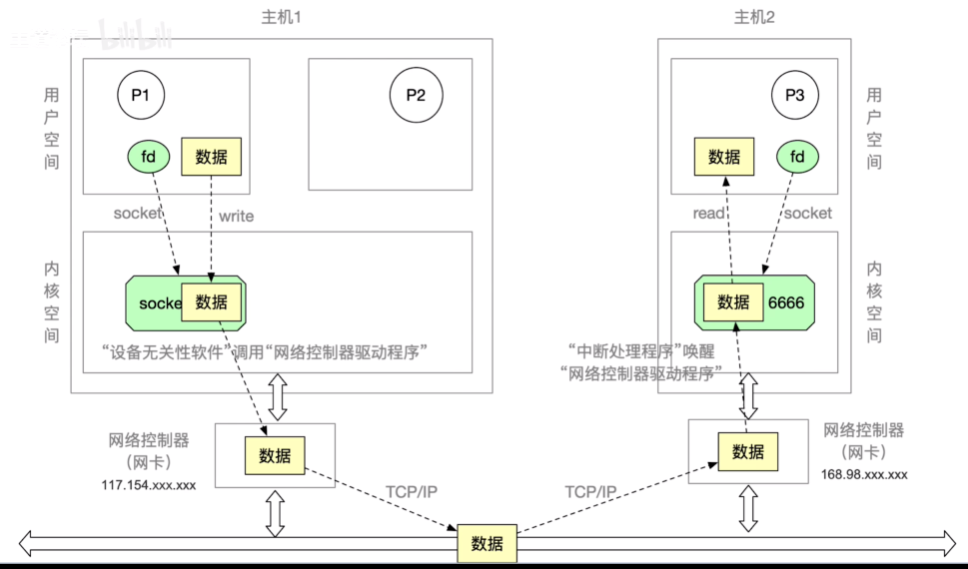
UNIX系统将外部设备抽象为一种特殊的文件,用户可以使用与文件操作相同的方式对外部设备进行操作。

1.2I/O控制器
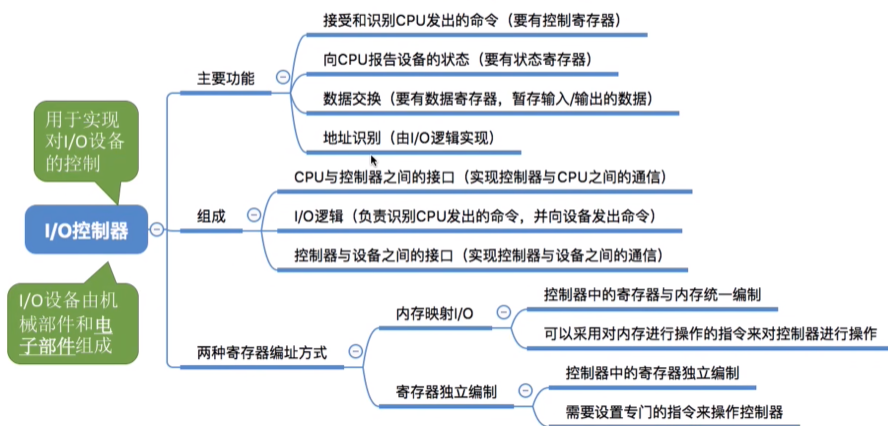
CPU无法直接控制I/o设备的机械部件,因此/o设备还要有一个电子部件作为CPU和/o设备机械部件之间的“中介”,用于实现CPU对设备的控制。
这个电子部件就是l/o控制器,又称设备控制器。CPU可控制I/o控制器,又由I/O控制器来控制设备的机械部件。
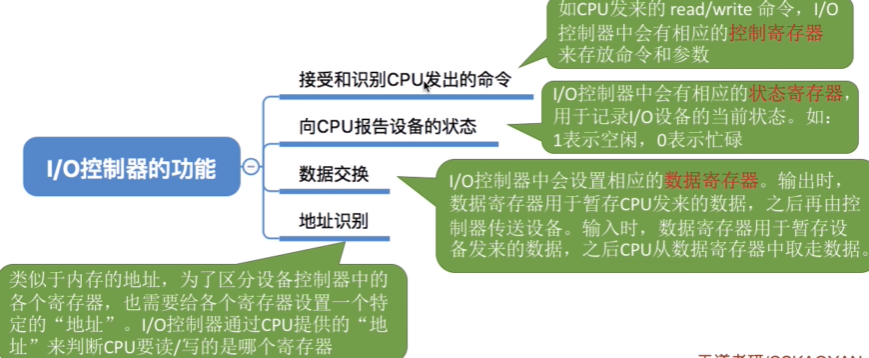
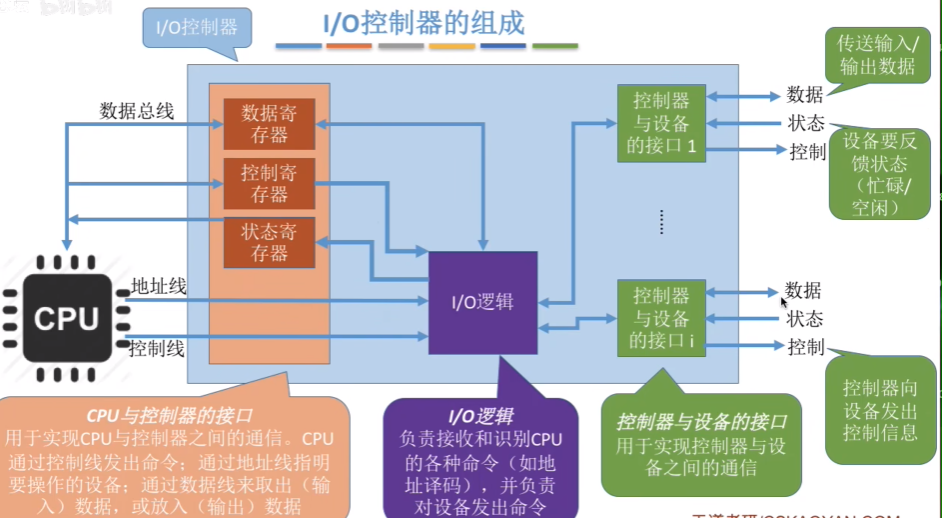
值得注意的小细节:
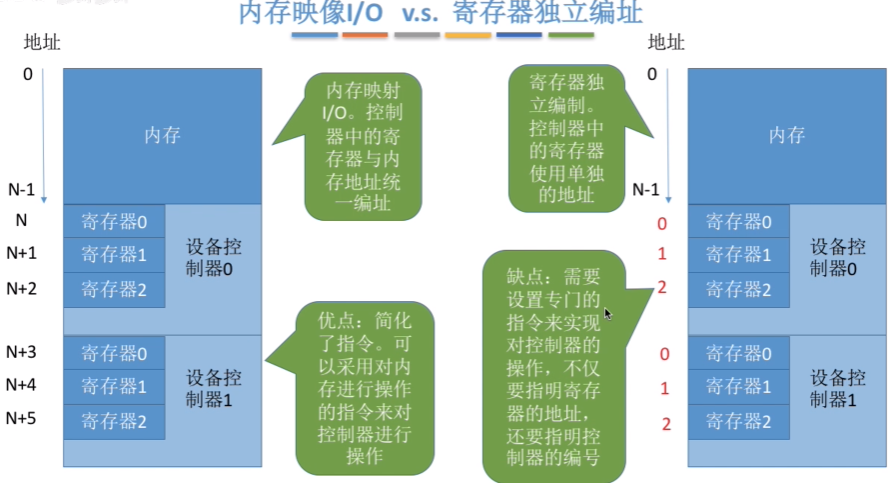
①一个I/o控制器可能会对应多个设备;
②数据寄存器、控制寄存器、状态寄存器可能有多个(如:每个控制/状态寄存器对应一个具体的设备),且这些寄存器都要有相应的地址,才能方便CPU操作。有的计算机会让这些寄存器占用内存地址的一部分,称为内存映像l/o;另一些计算机则采用I/o专用地址,即寄存器独立编址。
1.3I/O控制方式
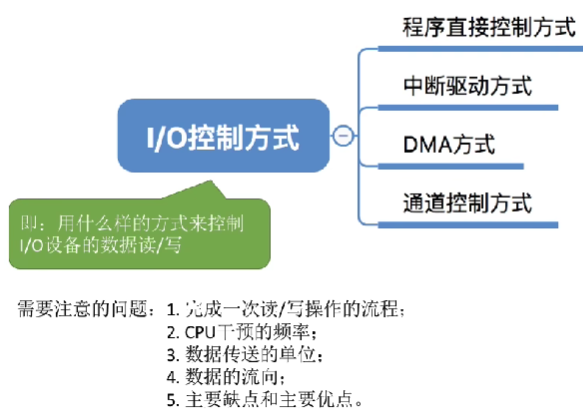
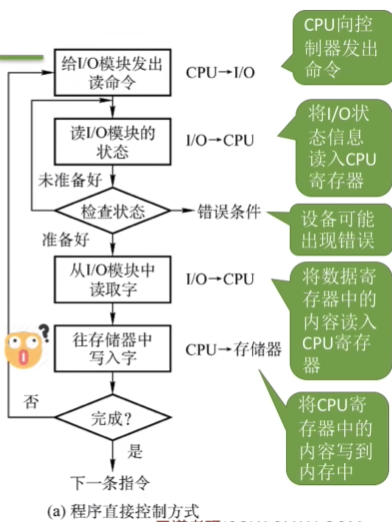
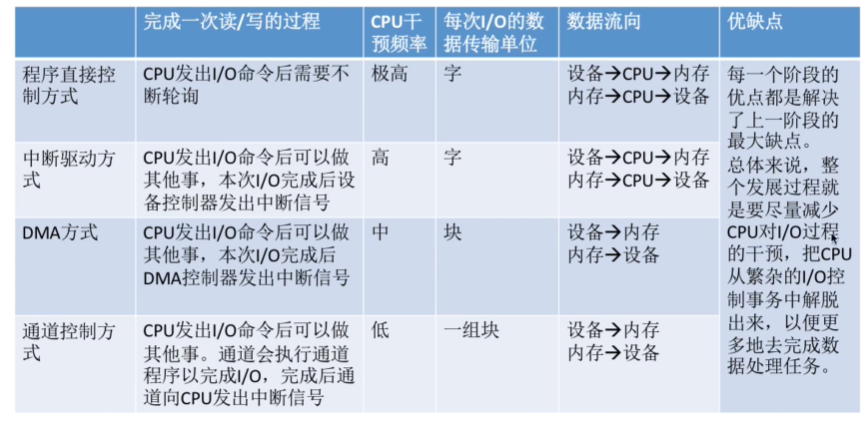
程序直接控制方式
2.CPU干预的频率
很频繁,I/o操作开始之前、完成之后需要CPU介入,并且在等待l/o完成的过程中CPU需要不断地轮询检查。
每次读/写一个字
优点:实现简单。
缺点:CPU和I/o设备只能串行工作,CPU需要一直轮询检查,长期处于“忙等”状态,CPU利用率低。
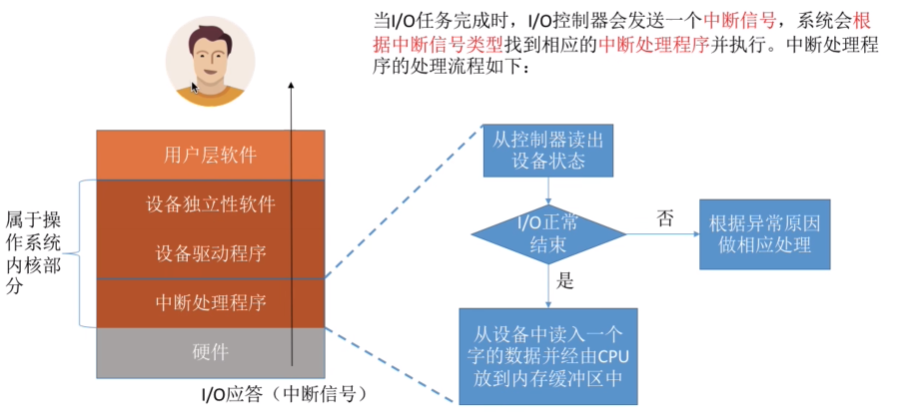
中断驱动方式
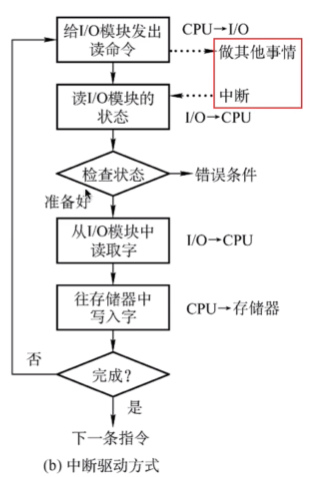
引入中断机制。由于I/o设备速度很慢,因此在CPU发出读/写命令后,可将等待I/o的进程阻塞,先切换到别的进程执行。当l/o完成后,控制器会向CPU发出一个中断信号,CPU检测到中断信号后,会保存当前进程的运行环境信息,转去执行中断处理程序处理该中断。处理中断的过程中,CPU从I/o控制器读一个字的数据传送到CPU寄存器,再写入主存。接着,CPU恢复等待I/o的进程(或其他进程)的运行环境,然后继续执行。
注意:①CPU会在每个指令周期的末尾检查中断;
②中断处理过程中需要保存、恢复进程的运行环境,这个过程是需要一定时间开销的。可见,如果中断发生的频率太高,也会降低系统性能。
2.CPU千预的频率
每次l/O操作开始之前、完成之后需要CPU介入。
等待l/o完成的过程中CPU可以切换到别的进程执行。
5.主要缺点和主要优点
优点:与“程序直接控制方式”相比,在“中断驱动方式”中,I/o控制器会通过中断信号主动报告I/o已完成,CPU不再需要不停地轮询。CPU和I/o设备可并行工作,CPU利用率得到明显提升。
缺点:每个字在/o设备与内存之间的传输,都需要经过CPU。而频繁的中断处理会消耗较多的CPU时间。
DMA方式
与“中断驱动方式”相比,DMA方式( Direct Memory Access,直接存储器存取。主要用于块设备的I/o控制)有这样几个改进:
①数据的传送单位是“块”。不再是一个字、一个字的传送;
②数据的流向是从设备直接放入内存,或者从内存直接到设备。不再需要CPU作为“快递小哥”。③仅在传送一个或多个数据块的开始和结束时,才需要CPU千预。
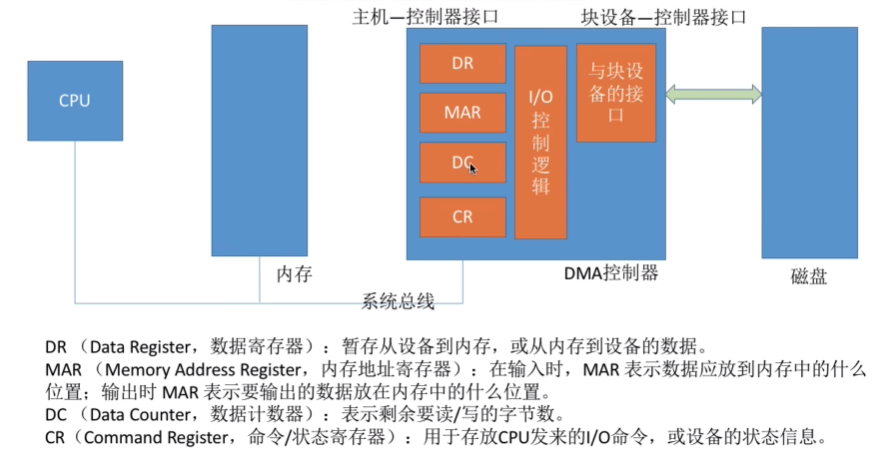
3.数据传送的单位
每次读/写一个或多个块(注意:每次读写的只能是连续的多个块,且这些块读入内存后在内存中也必须是连续的)
4.数据的流向(不再需要经过CPU)
通道控制方式
通道:一种硬件,可以理解为是“弱鸡版的CPU”。通道可以识别并执行一系列通道指令。
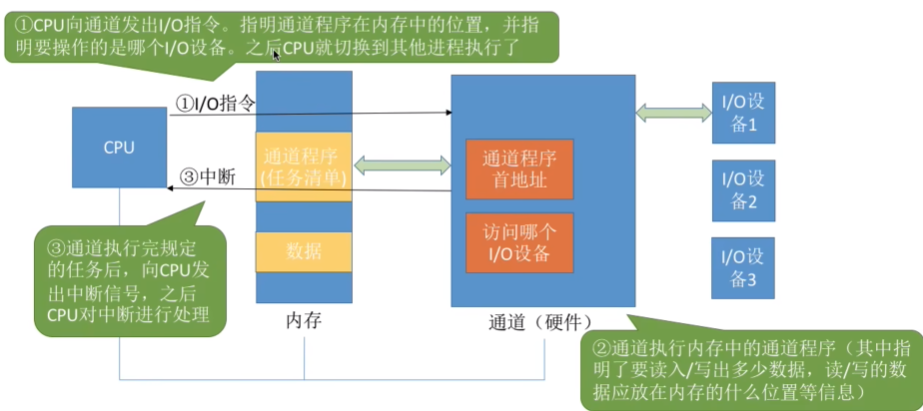
2.CPU干预的频率
极低,通道会根据cPU的指示执行相应的通道程序,只有完成一组数据块的读/写后才需要发出中断信号,请求CPU千预。
3.数据传送的单位
每次读/写一组数据块
4.数据的流向(在通道的控制下进行)
读操作(数据输入): I/o设备→内存写操作(数据输出):内存→I/O设备
5.主要缺点和主要优点
缺点:实现复杂,需要专门的通道硬件支持
优点:CPU、通道、I/O设备可并行工作,资源利用率很高。
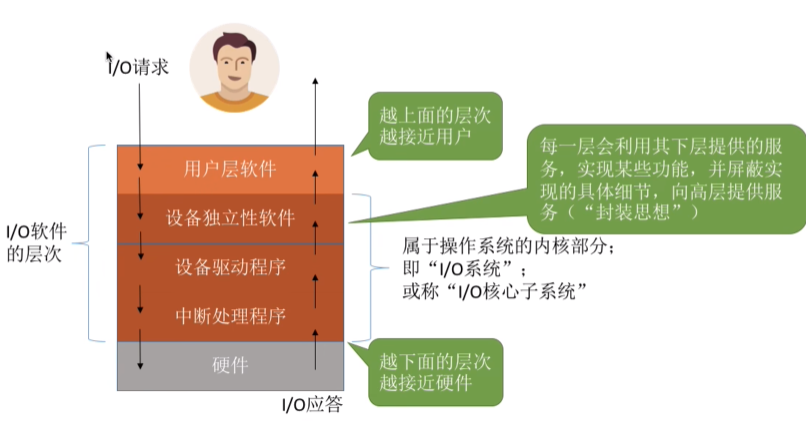
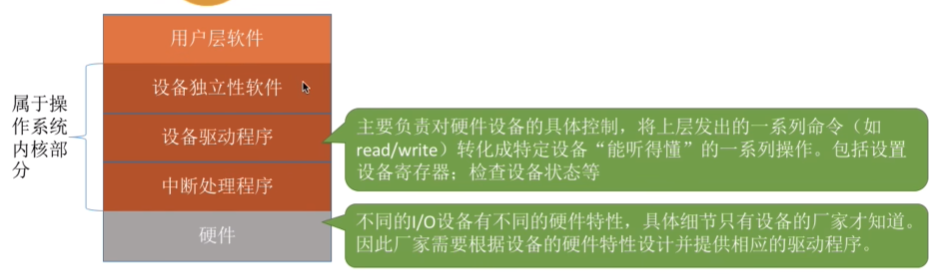
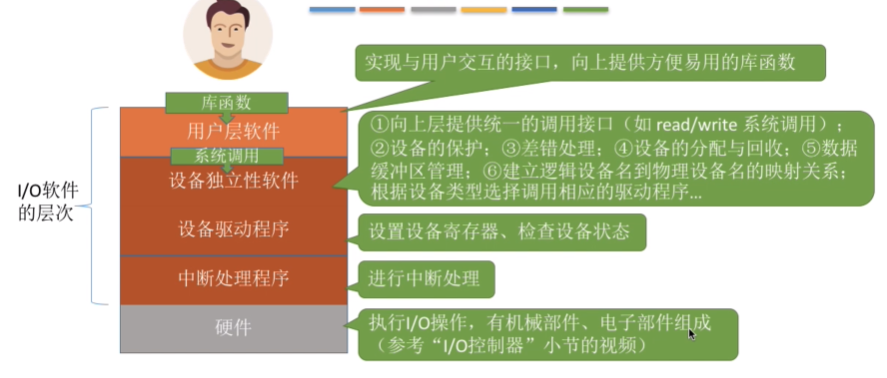
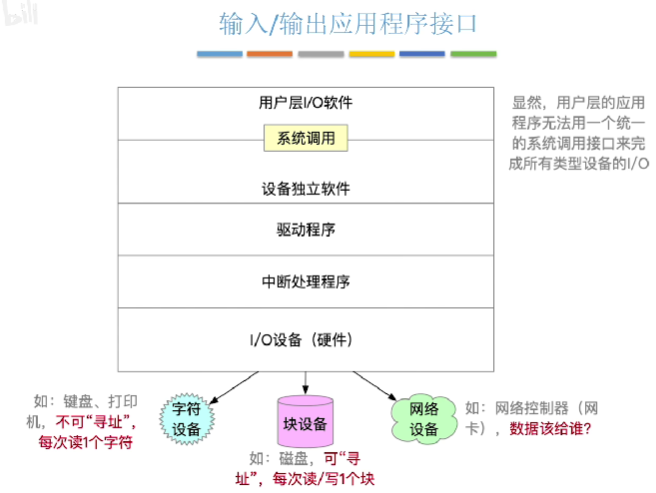
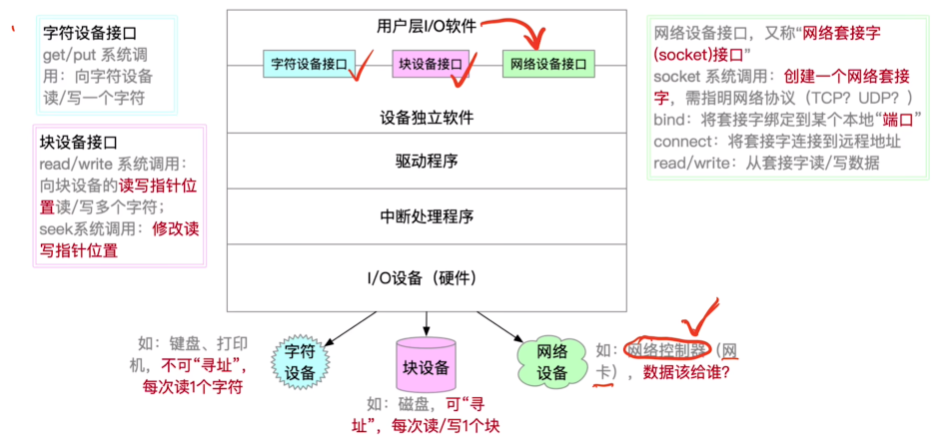
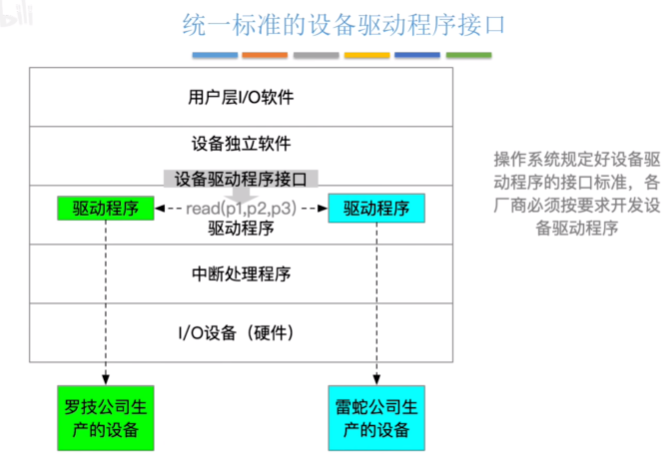
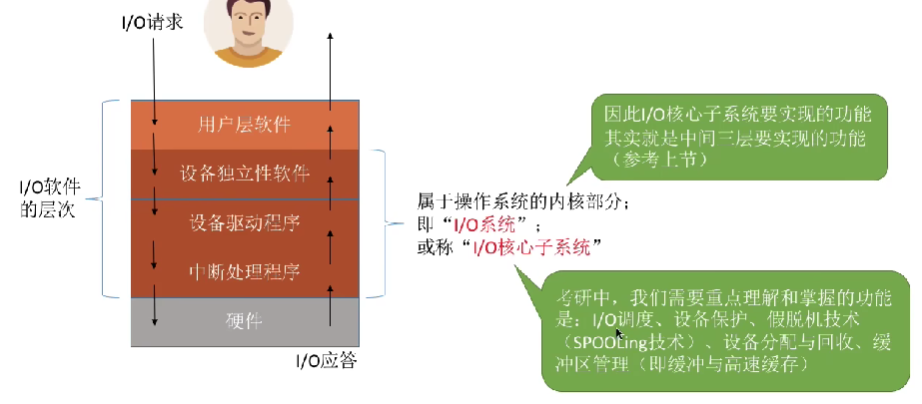
1.4I/O软件层次结构
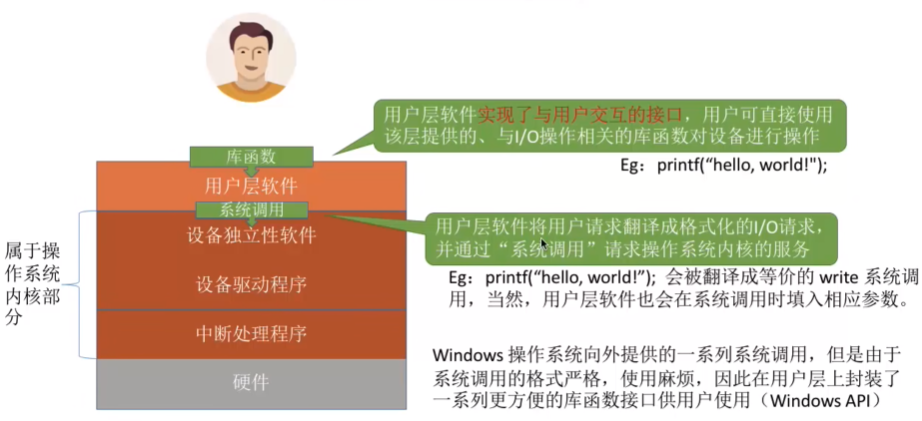
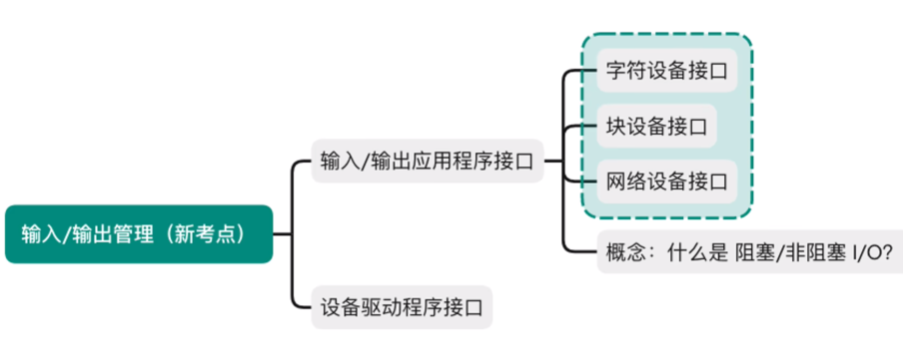
1.5输入输出应用程序接口和程序驱动接口
2.I/O核心子系统
操作系统需要实现文件保护功能,不同的用户对各个文件有不同的访问权限(如:只读、读和写等)。
在UNIx系统中,设备被看做是一种特殊的文件,每个设备也会有对应的FCB。当用户请求访问某个设备时,系统根据FCB中记录的信息来判断该用户是否有相应的访问权限,以此实现“设备保护”的功能。(参考“文件保护”小节)
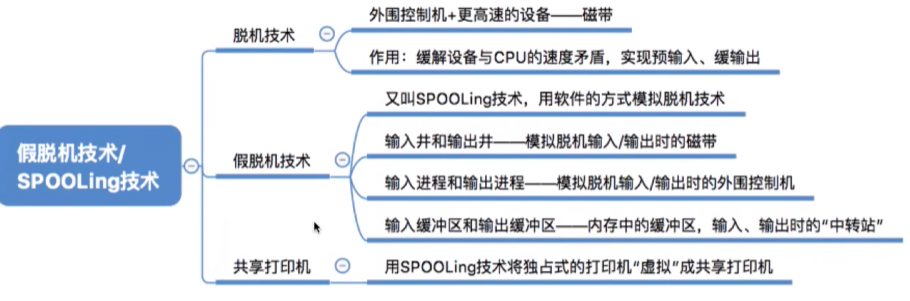
2.1假脱机技术
脱离主机的技术
批处理阶段引入了脱机输入/输出技术(用磁带完成):
“假脱机技术”,又称“SPOOLing 技术”是用软件的方式模拟脱机技术。SPOOLing 系统的组成如下:
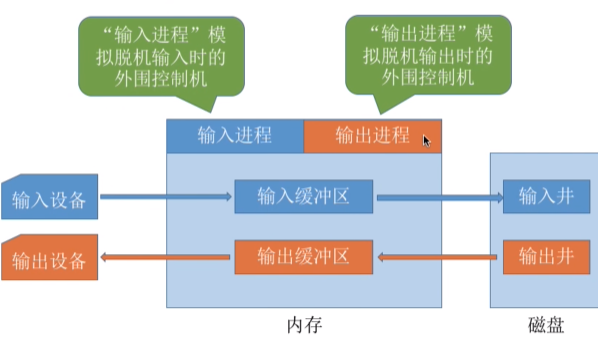
SPooLing 技术可以把一台物理设备虚拟成逻辑上的多台设备,可将独占式设备改造成共享设备。
2.2设备的分配与回收

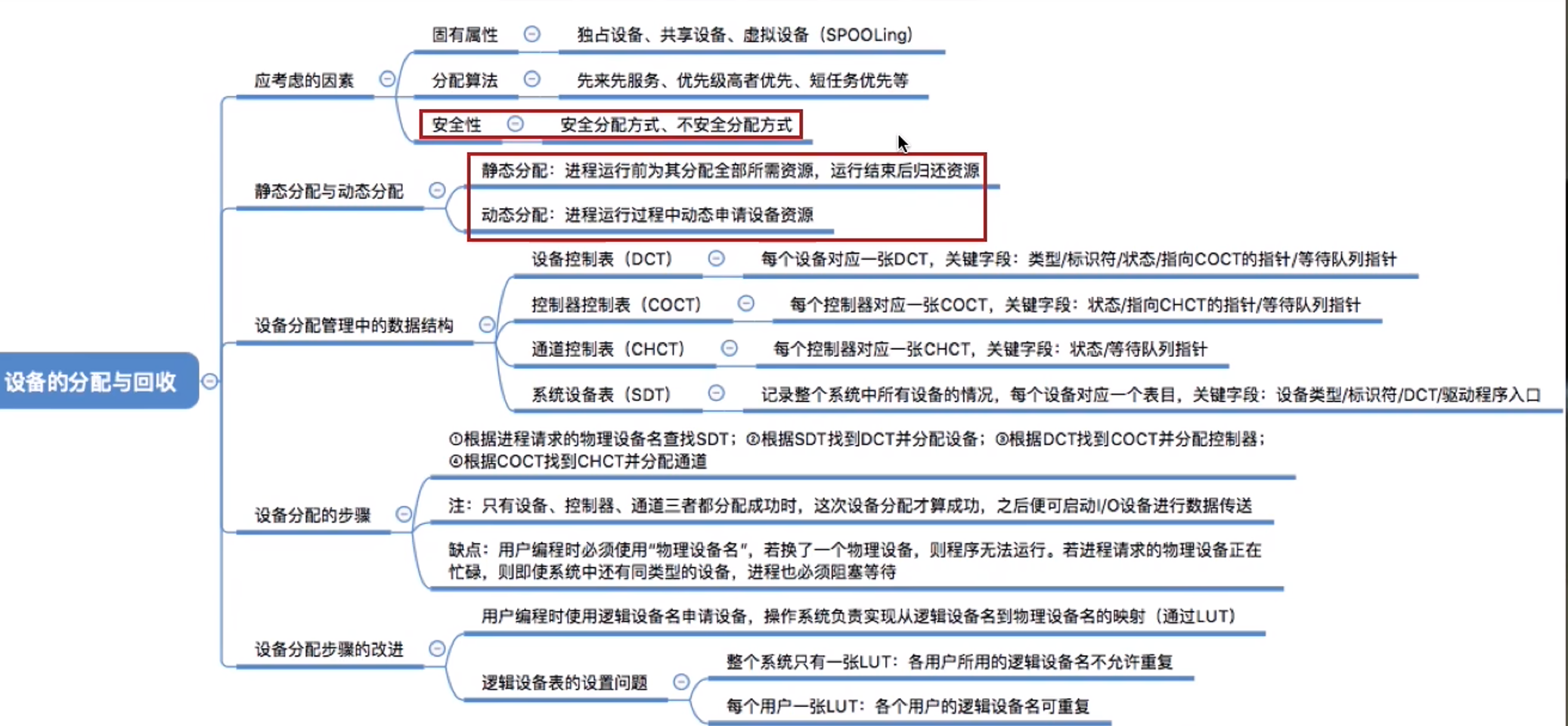
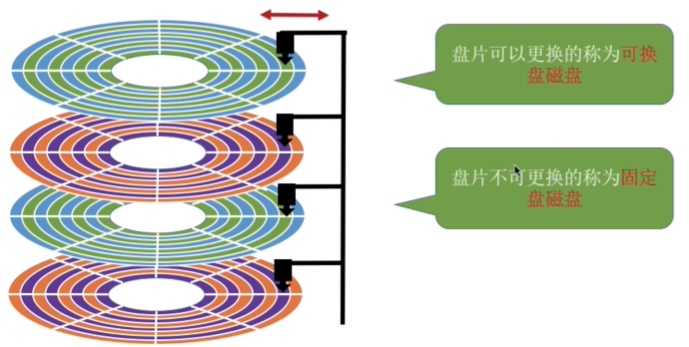
设备的固有属性可分为三种:独占设备、共享设备、虚拟设备。
独占设备―—一个时段只能分配给一个进程(如打印机)
共享设备――可同时分配给多个进程使用(如磁盘),各进程往往是宏观上同时共享使用设备,而微观上交替使用。
虚拟设备――采用SPOOLing 技术将独占设备改造成虚拟的共享设备,可同时分配给多个进程使用(如采用sPOOLing技术实现的共享打印机)
从进程运行的安全性上考虑,设备分配有两种方式:
安全分配方式:为进程分配一个设备后就将进程阻塞,本次I/o完成后才将进程唤醒。(eg:考虑进程请求打印机打印输出的例子)
不安全分配方式:进程发出I/o请求后,系统为其分配I/O设备,进程可继续执行,之后还可以发出新的I/o请求。只有某个I/o请求得不到满足时才将进程阻塞。
设备控制表(DCT):系统为每个设备配置一张DCT,用于记录设备情况
控制器控制表(COCT):每个设备控制器都会对应一张COCT。操作系统根据COCT的信息对控制器进行操作和管理。
通道控制表(CHCT):每个通道都会对应一张CHCT。操作系统根据CHCT的信息对通道进行操作和管理。
系统设备表(SDT):记录了系统中全部设备的情况,每个设备对应一个表目。
注︰只有设备、控制器、通道三者都分配成功时,这次设备分配才算成功,之后便可启动I/O设备进行数据传送
逻辑设备表(LUT)建立了逻辑设备名与物理设备名之间的映射关系。
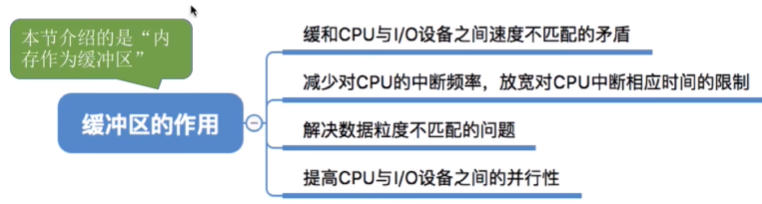
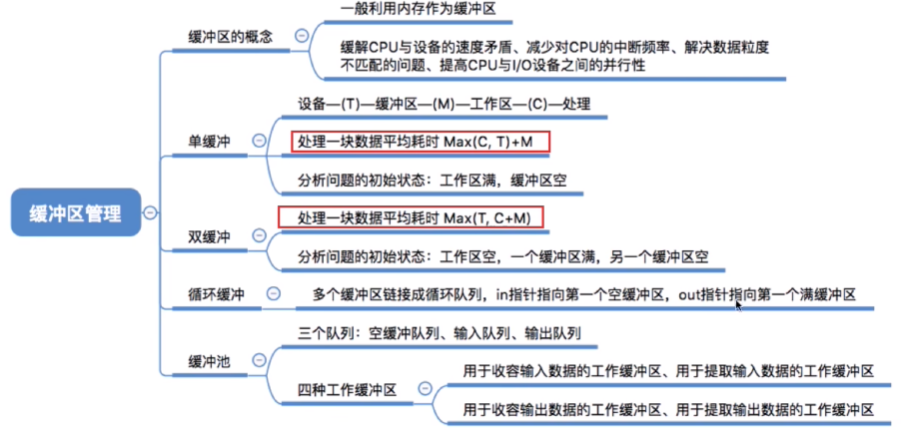
2.3缓冲区管理
缓冲区是一个存储区域,可以由专门的硬件寄存器组成,也可利用内存作为缓冲区。
使用硬件作为缓冲区的成本较高,容量也较小,一般仅用在对速度要求非常高的场合(如存储器管理中所用的联想寄存器,由于对页表的访问频率极高,因此使用速度很快的联想寄存器来存放页表项的副本)
一般情况下,更多的是利用内存作为缓冲区,“设备独立性软件”的缓冲区管理就是要组织管理好这些缓冲区
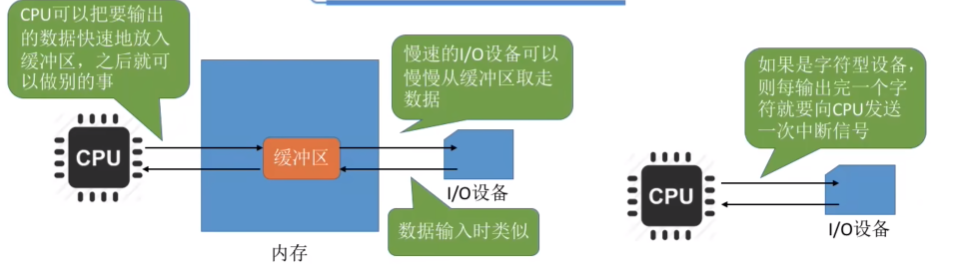
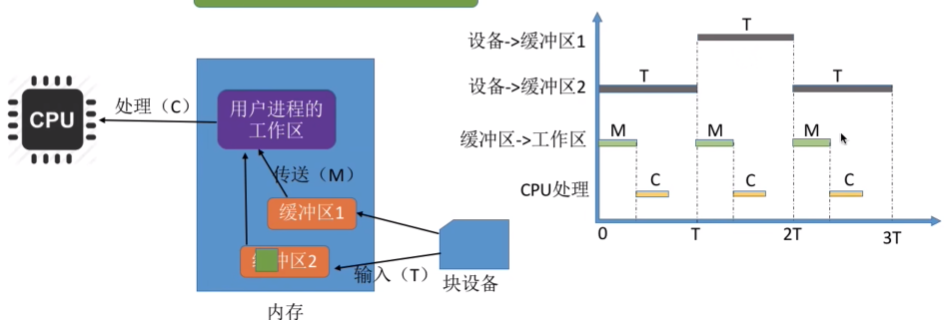
假设某用户进程请求某种块设备读入若干块的数据。若采用单缓冲的策略,操作系统会在主存中为其分配一个缓冲区 (若题目中没有特别说明,一个缓冲区的大小就是一个块)。
注意:当缓冲区数据非空时,不能往缓冲区冲入数据,只能从缓冲区把数据传出:当缓冲区为空时可以往缓冲区冲入数据,但必须把缓冲区充满以后,才能从缓冲区把数据传出。
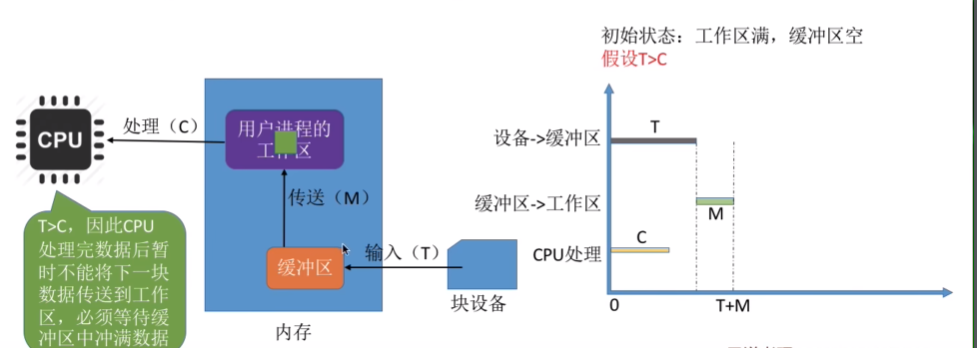
结论:采用单缓冲策略,处理一块数据平均耗时 Max(C,T)+M
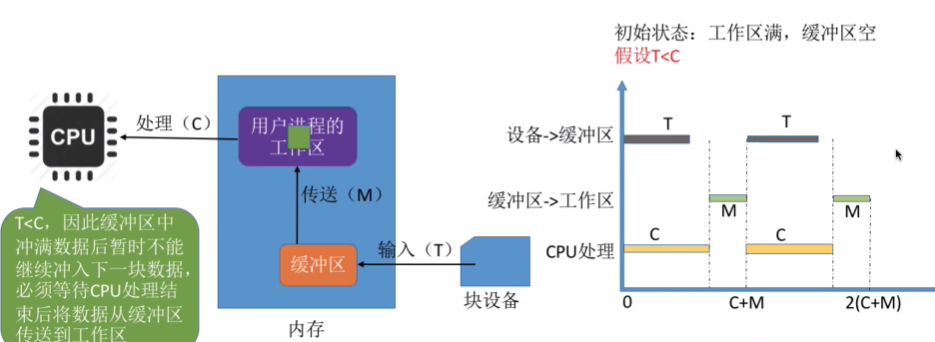
双缓冲策略
假设某用户进程请求某种块设备读入若干块的数据。若采用双缓冲的策略,操作系统会在主存中为其分配两个缓冲区(若题目中没有特别说明,一个缓冲区的大小就是一个块)
双缓冲题目中,假设初始状态为: 工作区空,其中一个缓冲区满,另一个缓冲区空 假设T>C+M
结论:采用双缓冲策略,处理一个数据块的平均耗时为 Max(T, C+M)
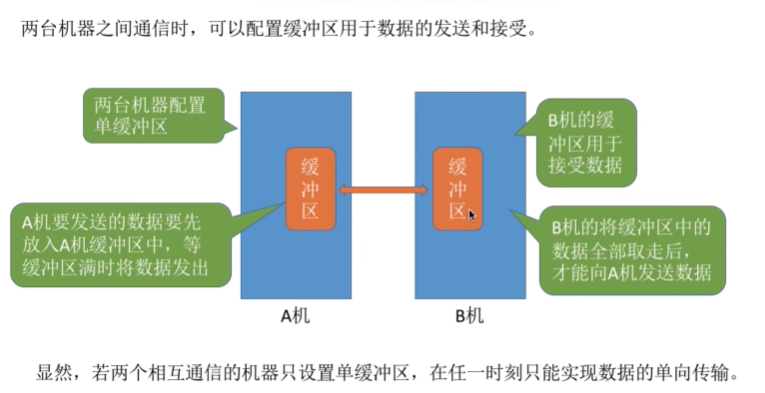
使用单/双缓冲在通信时的区别
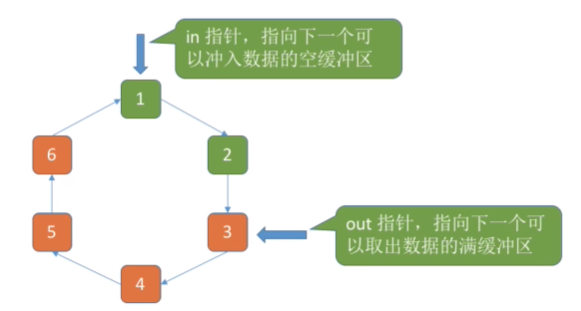
循环缓冲区
将多个大小相等的缓冲区链接成一个循环队列。
注:以下图示中,橙色表示已充满数据的缓冲区,绿色表示空缓冲区
缓冲池
缓冲池由系统中共用的缓冲区组成。这些缓冲区按使用状况可以分为: 空缓冲队列、装满输入数据的缓冲队列(输入队列)、装满输出数据的缓冲队列(输出队列)。
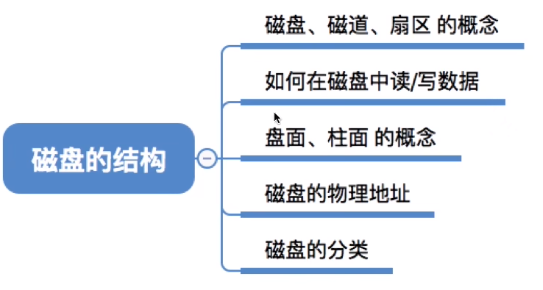
3.磁盘的结构
3.0磁盘的结构
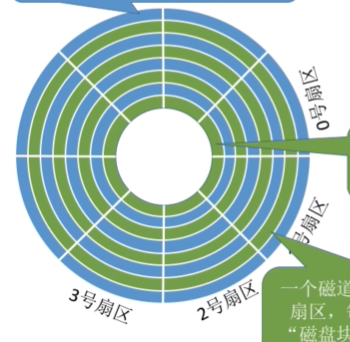
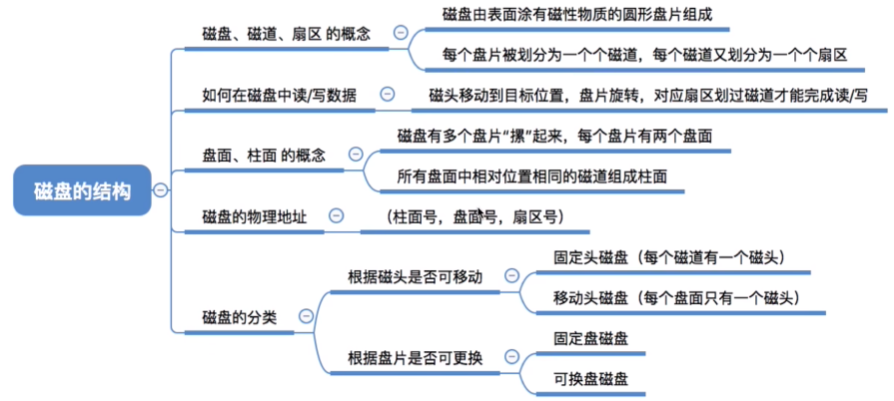
磁盘的表面由一些磁性物质组成,可以用这些磁性物质来记录二进制数据。
磁盘的盘面被划分成一个个磁道这样的一个“圈”就是一个磁道。
一个磁道又被划分成一个个扇区,每个扇区就是一个“磁盘块”。各个扇区存放的数据量相同 (如1KB)
最内侧磁道上的扇区面积最小,因此数据密度最大
如何在磁盘中读/写数据
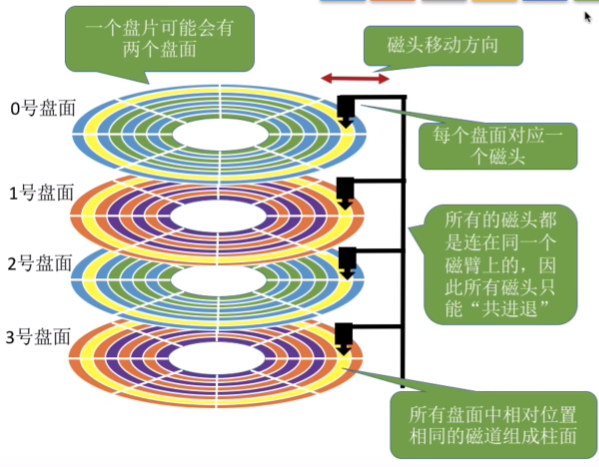
需要把“磁头”移动到想要读/写的扇区所在的磁道磁盘会转起来,让目标扇区从磁头下面划过,才能完成对扇区的读/写操作。
盘面、柱面
可用(柱面号,盘面号,扇区号)来定位任意一个“磁盘块”。在“文件的物理结构”小节中,我们经常提到文件数据存放在外存中的几号块,这个块号就可以转换成(柱面号,盘面号,扇区号)的地址形式。
可根据该地址读取一个“块”
1)根据“柱面号”移动磁臂,让磁头指向指定柱面;
2)激活指定盘面对应的磁头;
3)磁盘旋转的过程中,指定的扇区会从磁头下面划过,这样就完成了对指定扇区的读/写。
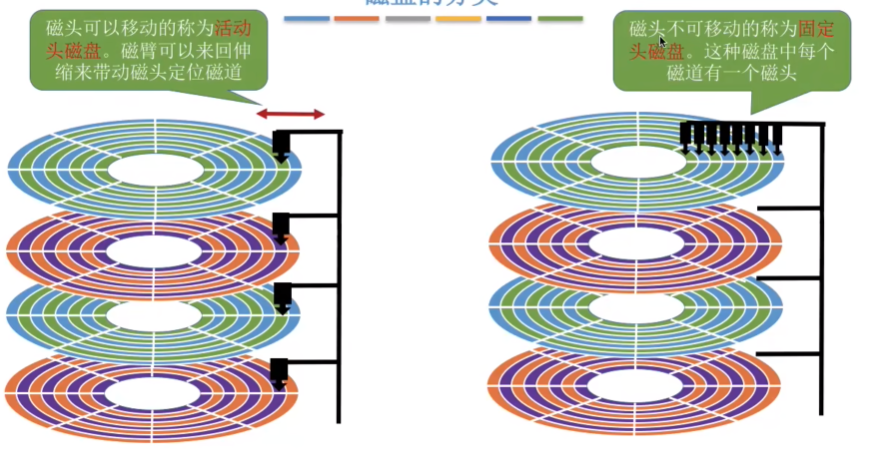
磁盘的分类
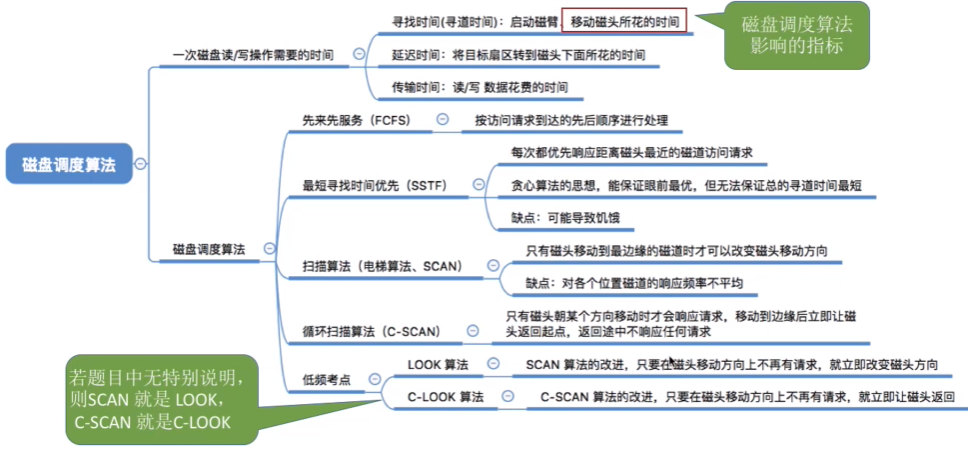
3.1磁盘调度算法
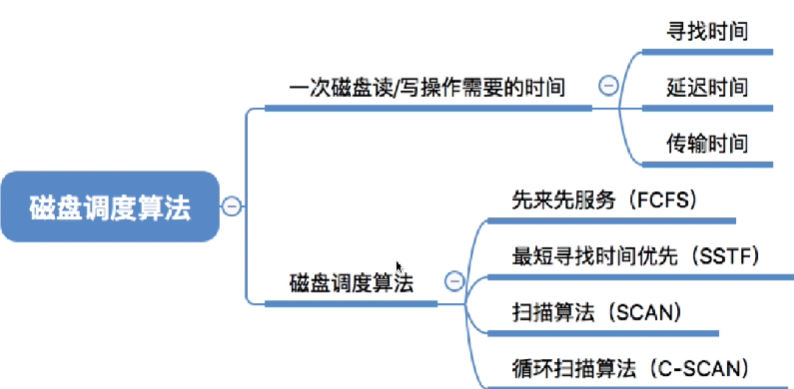
一次磁盘读/写操作需要的时间
寻找时间(寻道时间)Ts: 在读/写数据前,将磁头移动到指定磁道所花的时间。
1.启动磁头臂是需要时间的。假设耗时为 s;
2.移动磁头也是需要时间的。假设磁头匀速移动,每跨越一个磁道耗时为 m,总共需要跨越 n 条磁道。则:寻道时间 Ts= s + m*n
延迟时间Tg: 通过旋转磁盘,使磁头定位到目标扇区所需要的时间。设磁盘转速为r (单位:转/秒,或转/分),则平均所需的延迟时间 T =(1/2)*(1/r) = 1/2r.
1/r 就是转一圈需要的时间。找到目标扇区平均需要转半圈,因此再乘以 1/2.
传输时间T: 从磁盘读出或向磁盘写入数据所经历的时间,假设磁盘转速为r,此次读/写的字节数为 b,每个磁道上的字节数为 N。则:
传输时间T,= (1/r) * (b/N) = b/(rN)
每个磁道要可存 N 字节的数据,因此 b 字节的数据需要 b/N 个磁道才能存储。而读/写一个磁道所需的时间刚好又是转一圈所需要的时间 1/r
延迟时间和传输时间都与磁盘转速相关,且为线性相关。而转速是硬件的固有属性,因此操作系统也无法优化延迟时间和传输时间。
但是操作系统的磁盘调度算法会直接影响寻道时间。
先来先服务算法(FCFS)
根据进程请求访问磁盘的先后顺序进行调度。
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道。
按照 FCFS 的规则,按照请求到达的顺序,磁头需要依次移动到 55、58、39、18、90、160、150、38、184 号磁道。
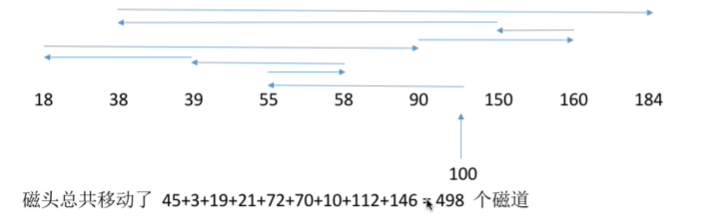
磁头总共移动了45+3+19+21+72+70+10+112+146 = 498 个磁道
响应一个请求平均需要移动 498/9 = 55.3 个磁道(平均寻找长度)
优点: 公平;如果请求访问的磁道比较集中的话,算法性能还算过的去
缺点:如果有大量进程竞争使用磁盘,请求访问的磁道很分散,则FCFS在性能上很差,寻道时间长。
最短寻找时间优先(SSTF)
SSTF 算法会优先处理的磁道是与当前磁头最近的磁道。可以保证每次的寻道时间最短,但是并不能保证总的寻道时间最短。 (其实就是贪心算法的思想,只是选择眼前最优,但是总体未必最优)。
假设磁头的初始位置是100号磁道,有多个进程先后陆续地请求访问 55、58、39、18、90、160150、38、184 号磁道。
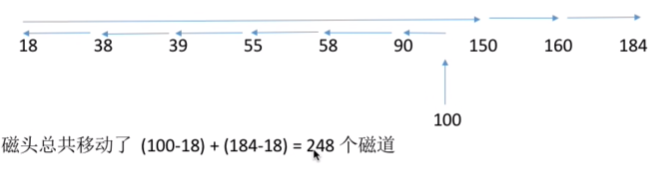
磁头总共移动了(100-18) +(184-18) = 248 个磁道
响应一个请求平均需要移动 248/9 = 27.5个磁道(平均寻找长度)
优点:性能较好,平均寻道时间短
缺点:可能产生“饥饿”现象。
产生饥饿的原因在于: 磁头在一个小区域内来回来去地移动
Eg:本例中,如果在处理18号磁道的访问请求时又来了一个38号磁道的访问请求,处理38号磁道的访问请求时又来了一个18号磁道的访问请求。如果有源源不断的 18号、38号磁道的访问请求到来的话,150、160、184 号磁道的访问请求就永远得不到满足,从而产生“饥饿”现象。
扫描算法 (SCAN)
SSTF 算法会产生饥饿的原因在于:磁头有可能在一个小区域内来回来去地移动。
为了防止这个问题可以规定,只有磁头移动到最外侧磁道的时候才能往内移动,移动到最内侧磁道的时候才能往外移动。这就是扫描算法 (SCAN)的思想。由于磁头移动的方式很像电梯,因此也叫=电梯算法。
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道。
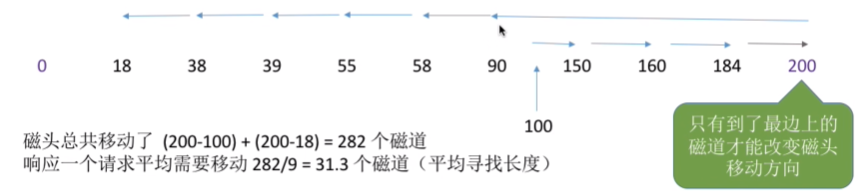
磁头总共移动了 (200-100) +(20-18) = 282 个磁道
响应一个请求平均需要移动 282/9 =313 个磁道(平均寻找长度)
优点:性能较好,平均寻道时间较短,不会产生饥饿现象
缺点:
1.只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了。
2.SCAN算法对于各个位置磁道的响应频率不平均(如:假设此时磁头正在往右移动,且刚处理过90号磁道,那么下次处理90号磁道的请求就需要等磁头移动很长一段距离:而响应了184号磁道的请求之后,很快又可以再次响应 184 号磁道的请求了)。
LOOK 调度算法
扫描算法 (SCAN)中,只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了。
LOOK 调度算法就是为了解决这个问题,如果在磁头移动方向上已经没有别的请求,就可以立即改变磁头移动方向。 (边移动边观察,因此叫LOOK)
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道。
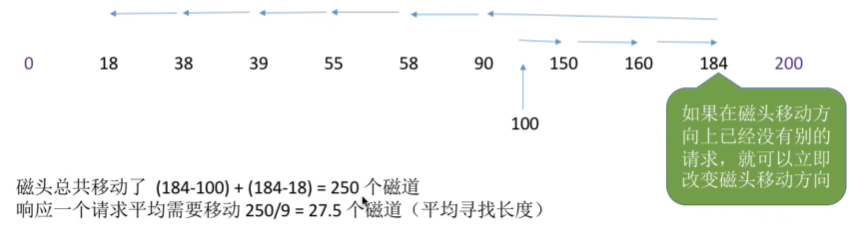
优点:比起 SCAN 算法来,不需要每次都移动到最外侧或最内侧才改变磁头方向,使寻道时间进一步缩短
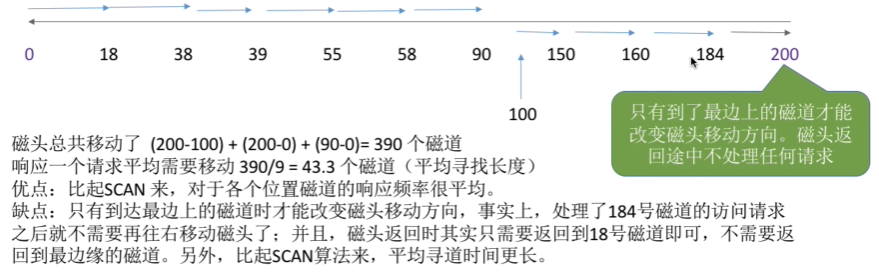
循环扫描算法(C-SCAN)
SCAN算法对于各个位置磁道的响应频率不平均,而 C-SCAN 算法就是为了解决这个问题。规定只有磁头朝某个特定方向移动时才处理磁道访问请求,而返回时直接快速移动至起始端而不处理任何请求。
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道。
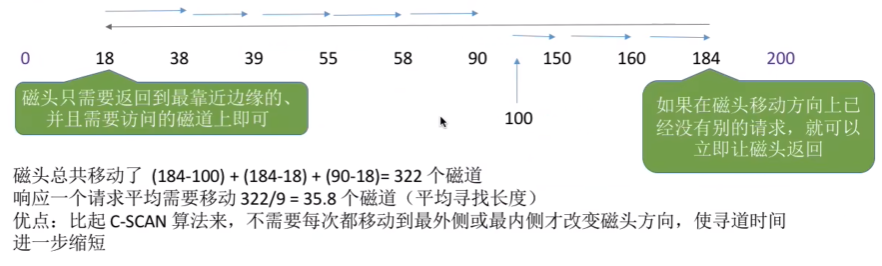
C-LOOK 调度算法
C-SCAN 算法的主要缺点是只有到达最边上的磁道时才能改变磁头移动方向,并且磁头返回时不一定需要返回到最边缘的磁道上。C-LOOK 算法就是为了解决这个问题。如果磁头移动的方向上已经没有磁道访问请求了,就可以立即让磁头返回,并且磁头只需要返回到有磁道访问请求的位置即可。
假设某磁盘的磁道为 0~200号,磁头的初始位置是100号磁道,且此时磁头正在往磁道号增大的方向移动,有多个进程先后陆续地请求访问 55、58、39、18、90、160、150、38、184 号磁道。
3.2减少磁盘延迟时间的方法

假设要连续读取橙色区域的2、3、4扇区:
磁头读取一块的内容(也就是一个扇区的内容)后,需要一小段时间处理,而盘片又在不停地旋转
因此,如果2、3号扇区相邻着排列,则读完2号扇区后无法连续不断地读入3号扇区
必须等盘片继续旋转,3号扇区再次划过磁头,才能完成扇区读入
结论:磁头读入一个扇区数据后需要一小段时间处理如果逻辑上相邻的扇区在物理上也相邻,则读入几个连续的逻辑扇区,可能需要很长的“延迟时间“
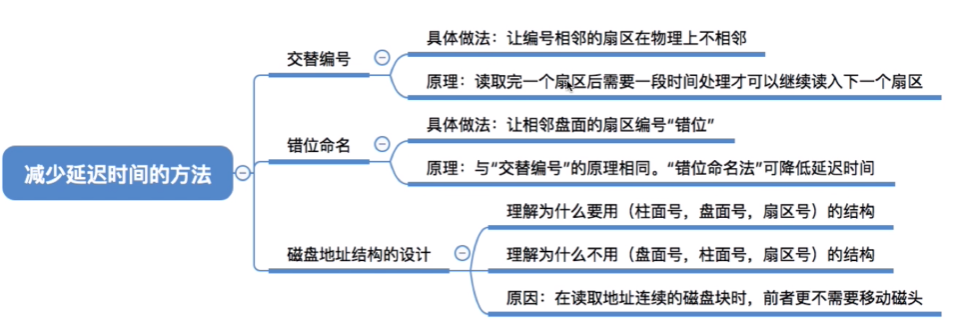
减少延迟时间的方法:交替编号
若采用交替编号的策略,即让逻辑上相邻的扇区在物理上有一定的间隔,可以使读取连续的逻辑扇区所需要的延迟时间更小。
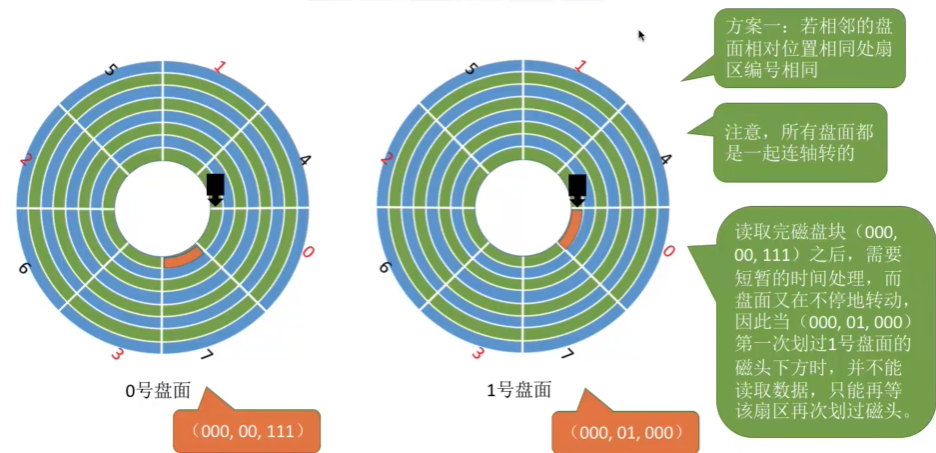
磁盘地址结构的设计
假设某磁盘有8个柱面/磁道(假设最内侧柱面/磁道号为0)4个盘面,8个扇区。则可用3个二进制位表示柱面,2个二进制位表示盘面,3个二进制位表示扇区。
若物理地址结构是(盘面号,柱面号,扇区号),且需要连续读取物理地址 (00,000,000)~ (00,001,111)的扇区:
(00,000,000)~ (00,000,111 ) 转两圈可读完
之后再读取物理地址相邻的区域,
即(00,001,000)~(00,001,111),需要启动磁头臂,将磁头移动到下一个磁道
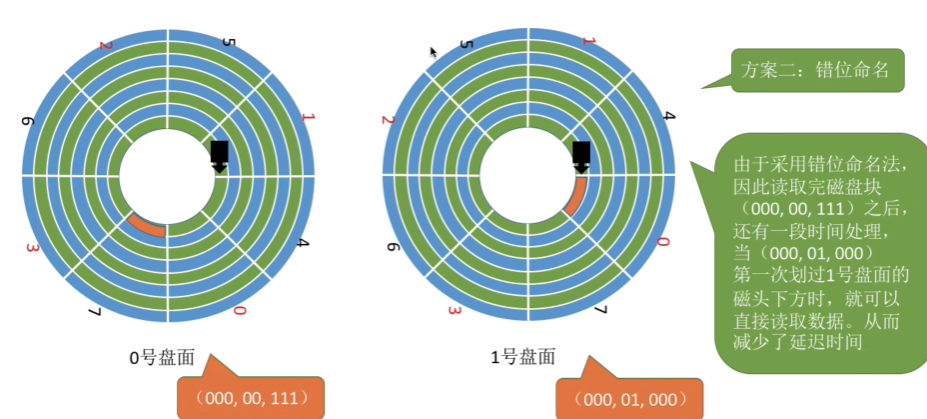
若物理地址结构是 (柱面号,盘面号,扇区号),且需要连续读取物理地址 (000,00,000)~ (000,01,111)的扇区:
(000,00,000)~(000,00,111) 由盘面0的磁头读入数据
之后再读取物理地址相邻的区域,即(000,01,000)~(000,01,111),由于柱面号/磁道号相同,只是盘面号不同,因此不需要移动磁头臂。只需要激活相邻盘面的磁头即可
答:读取地址连续的磁盘块时,采用(柱面号,盘面号,扇区号) 的地址结构可以减少磁头移动消耗的时间。
减少延迟时间的方法:错位命名
3.3磁盘的管理
磁盘初始化
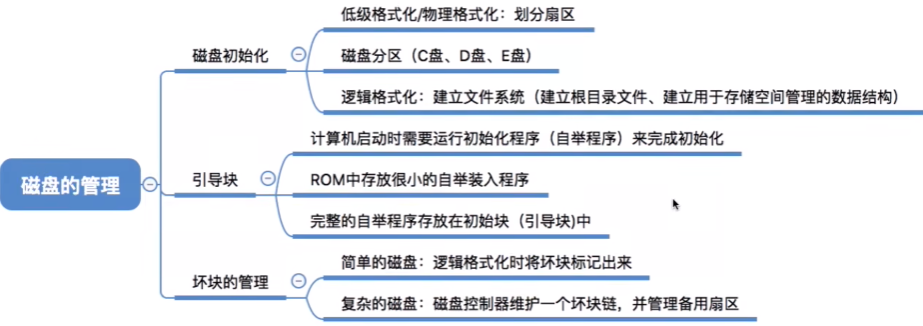
磁盘初始化:
Step 1: 进行低级格式化(物理格式化),将磁盘的各个磁道划分为扇区。一个扇区通常可分为 头、数据区域(如512B大小)、尾三个部分组成。管理扇区所需要的各种数据结构一般存放在头、尾两个部分,包括扇区校验码(如奇偶校验、CRC循环冗余校验码等,校验码用于校验扇区中的数据是否发生错)
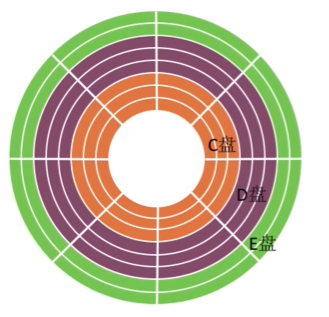
Step 2:将磁盘分区,每个分区由若干柱面组成(即分为我们熟悉的 C盘、D盘、E盘)
step 3:进行逻辑格式化,创建文件系统。包括创建文件系统的根目录、初始化存储空间管理所用的数据结构(如位示图空闲分区表)
引导块
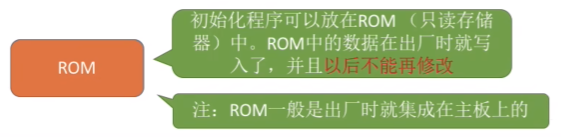
计算机开机时需要进行一系列初始化的工作,这些初始化工作是通过执行==初始化程序 (自举程序) ==完成的。
需要更新呢?

拥有启动分区的磁盘称为启动磁盘或系统(C:盘)
坏块的管理
坏了、无法正常使用的扇区就是“坏块”。这属于硬件故障,操作系统是无法修复的。应该将坏块标记出来,以免错误地使用到它。
对于简单的磁盘,可以在逻辑格式化时(建立文件系统时)对整个磁盘进行坏块检查,标明哪些扇区是坏扇区比如:在FAT 表上标明。 (在这种方式中,坏块对操作系统不透明)
对于复杂的磁盘,磁盘控制器磁盘设备内部的一个硬件部件)会维护一个坏块链表在磁盘出厂前进行低级格式化(物理格式化)时就将坏块链进行初始化。
会保留一些“备用扇区”,用于替换坏块。这种方案称为扇区备用。且这种处理方式中,坏块对操作系统透明
3.4固态硬盘SSD



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!
2022-09-07 java概述