
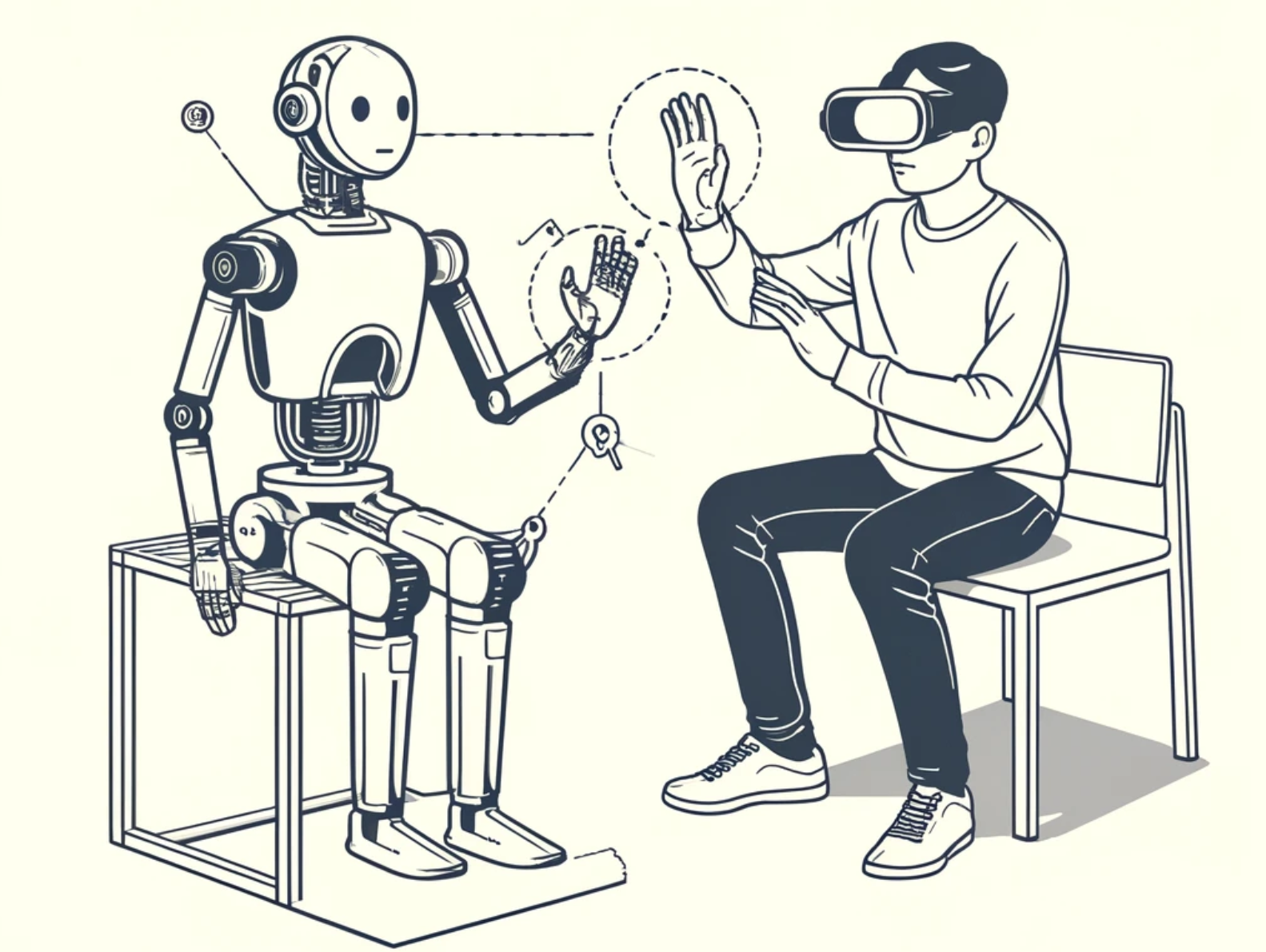
人形机器人 —— 示教学习 —— 远程操作系统(Teleoperation System)
说下个人对这部分的理解,这个就是说要机器人去在人类的控制下学习动作,或者说在人类的遥控下进行操作,然后记录下这部分操作的数据,然后再用这部分收集到的数据来对机器人进行训练。
其他相关:
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
标签:
杂谈


posted on 2024-12-06 19:17 Angry_Panda 阅读(15) 评论(0) 编辑 收藏 举报










【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)
2023-12-06 如何看待以色列的“全民兵役制度”
2023-12-06 韩国网费比其他国家贵10倍?—— 因网费太高,直播平台 Twitch 宣布2024年2月退出韩国市场
2022-12-06 机器学习领域中假设检验的使用
2020-12-06 【转载】 CNN训练Cifar-10技巧
2020-12-06 【转载】 ReLu(Rectified Linear Units)激活函数