经典强化学习算法:分层强化学习算法—options算法2(理解篇)
论文地址:
https://people.cs.umass.edu/~barto/courses/cs687/Sutton-Precup-Singh-AIJ99.pdf
例子:
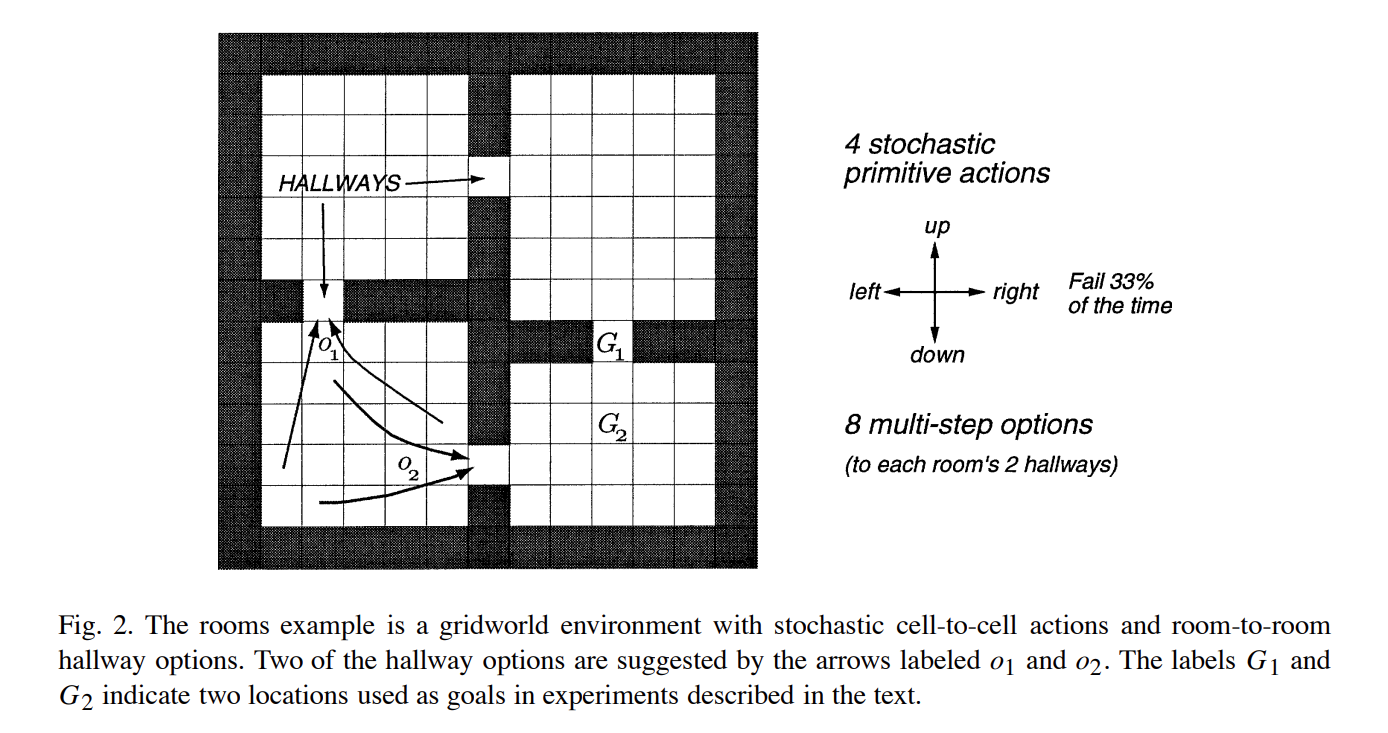
这是一个寻路问题,该问题使用强化学习算法解决,准确的来说是使用“表格表示的强化学习算法中的规划算法”来进行解决的;之所以没有说是使用规划算法来说是因为这里使用了学习型算法,即强化学习算法,虽然只是使用表格记录的方式,但是依旧使用了强化学习算法的形式进行;该问题的解决中对每个方格的状态值表示为V(s),整体使用策略迭代或值迭代的强化学习的规划算法来解决。
在这个问题中,agent有四个方向可以选择走,但是每次走只有2/3的概率会正确执行,1/3的概率会随机走其他三个方向中的一个;需要注意的是,agent的每一步行走的reward都是零,也就是说这个问题建模后形成的强化学习模型是一个稀疏模型。
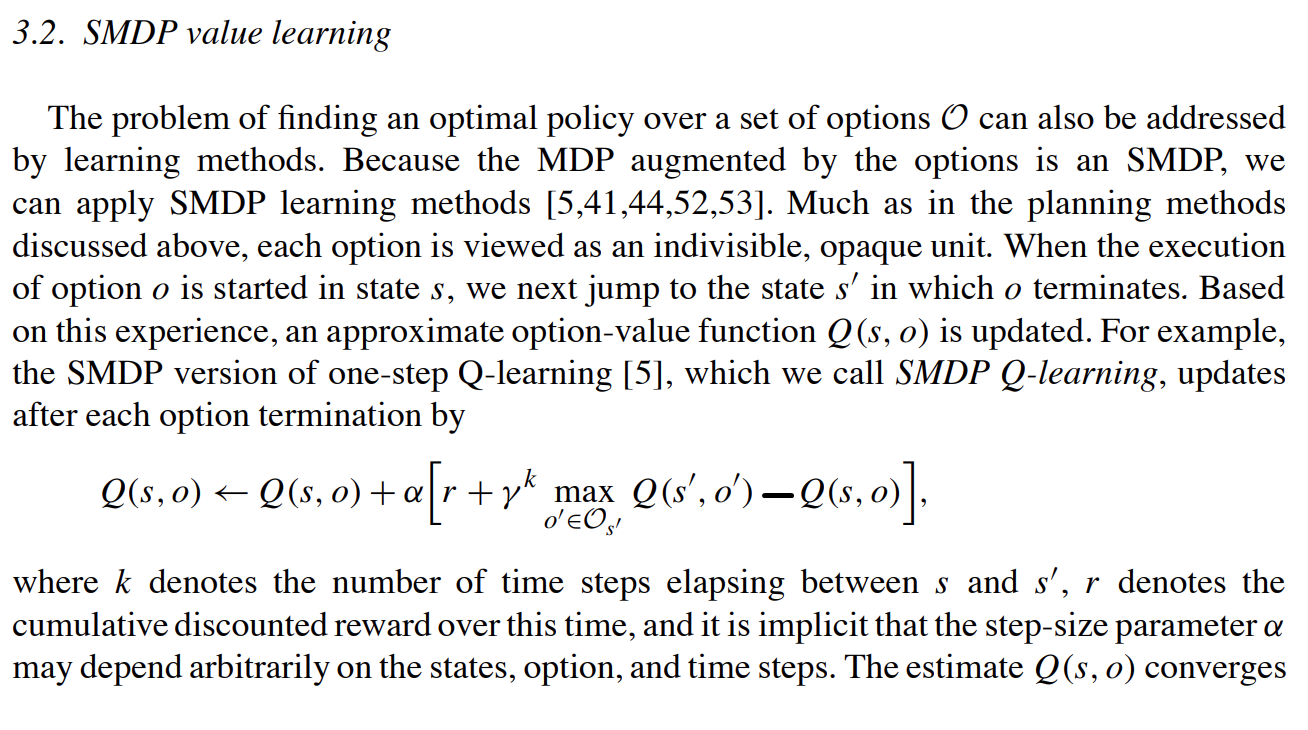
options算法的核心内容:
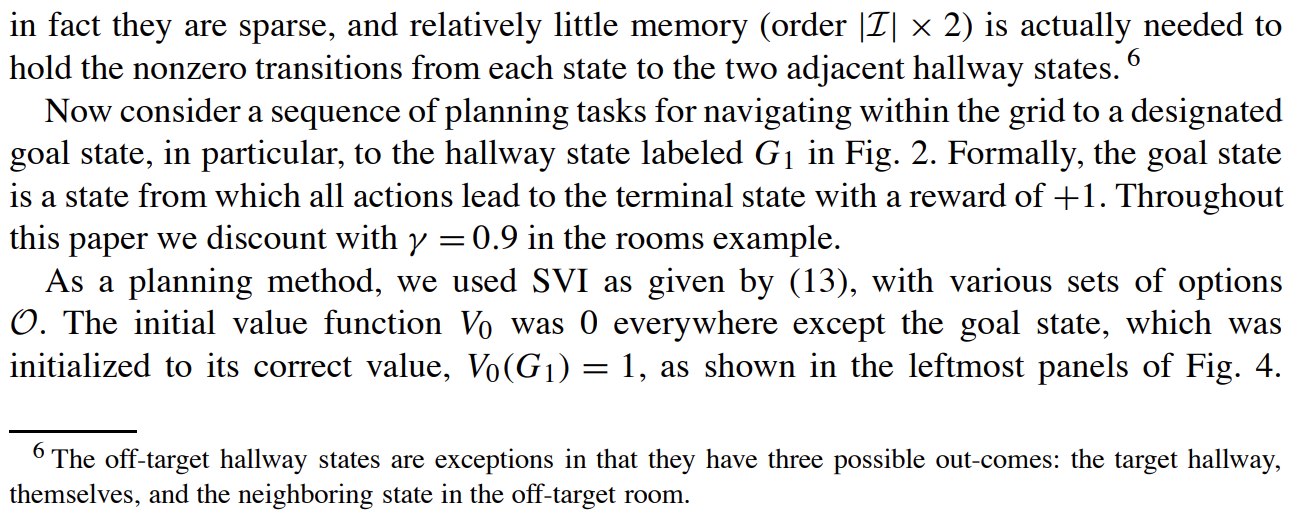
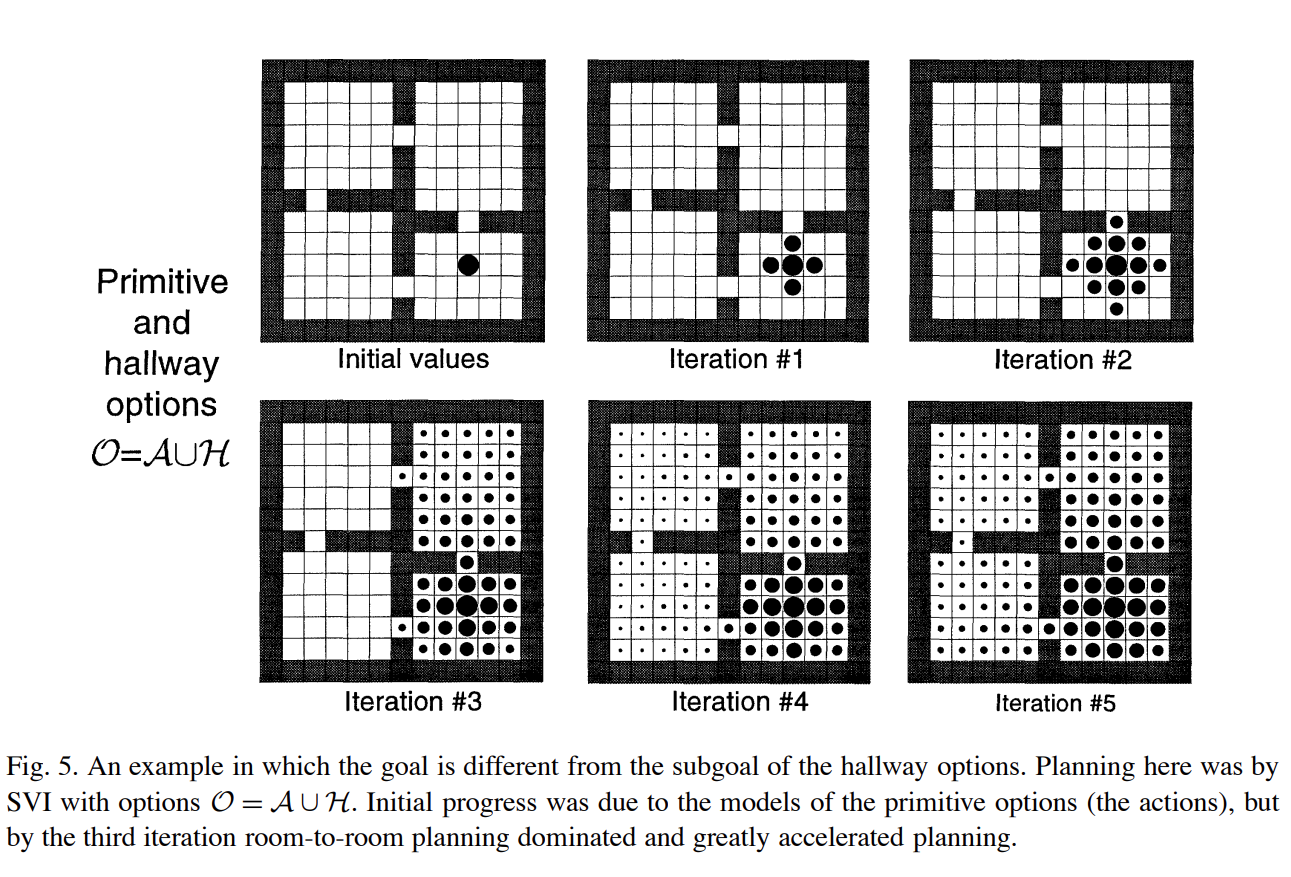
options算法在计算过程中的各个位置在表格中的状态值的变化过程示意图:(该问题就是计算所有房间的位置到到达初始位置的状态值V(state)的值大小)
其中下图方块中涂黑的面积大小表示对应的状态值V(s)的值的大小,最大时为1,完全空白为0。
下图中上一行中options的动作为单步,下一行中的options的动作为multi-steps。
multi-steps的options动作指的就是在一次状态值更新时是对划分后问题的一整个option动作覆盖的空间进行计算,下图中则是对整个房间(room)进行更新计算。
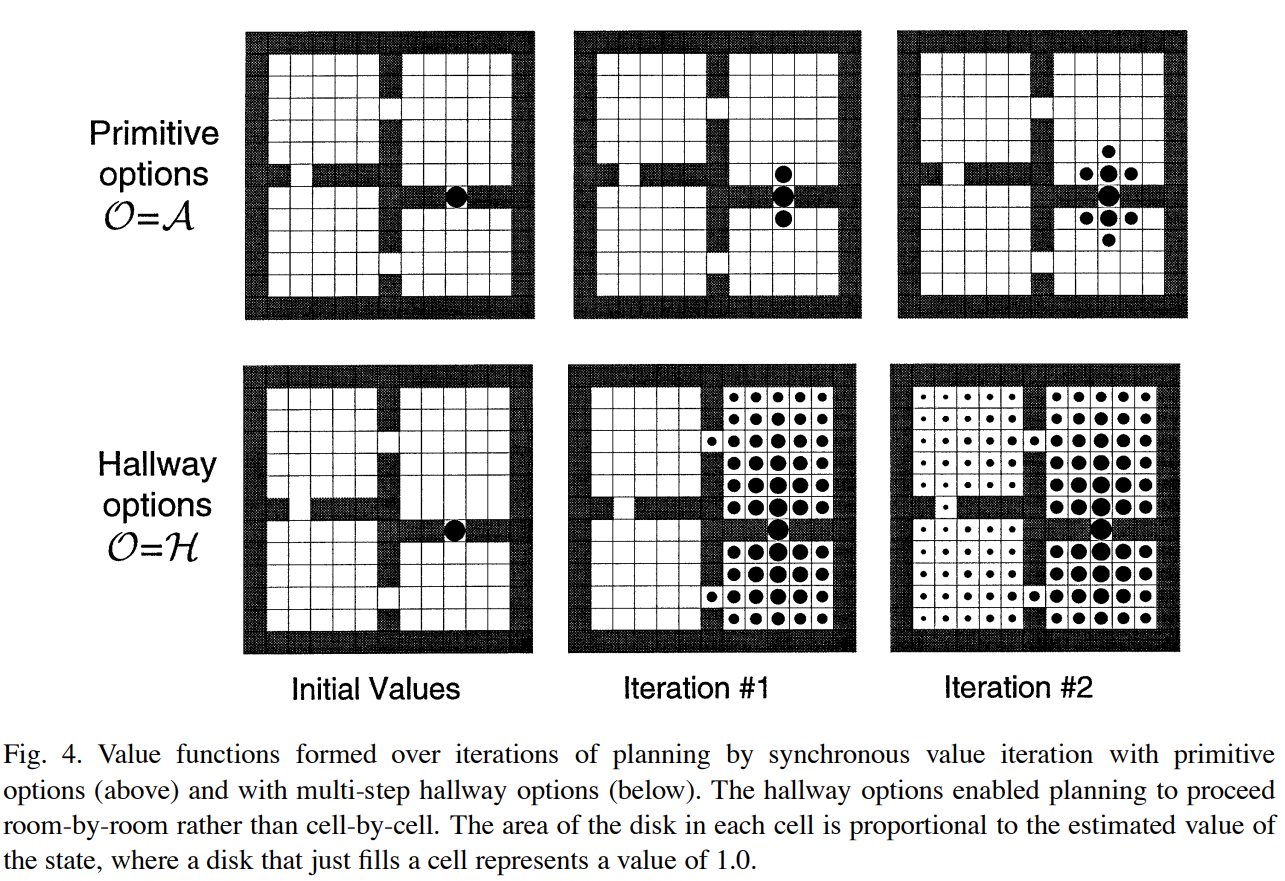
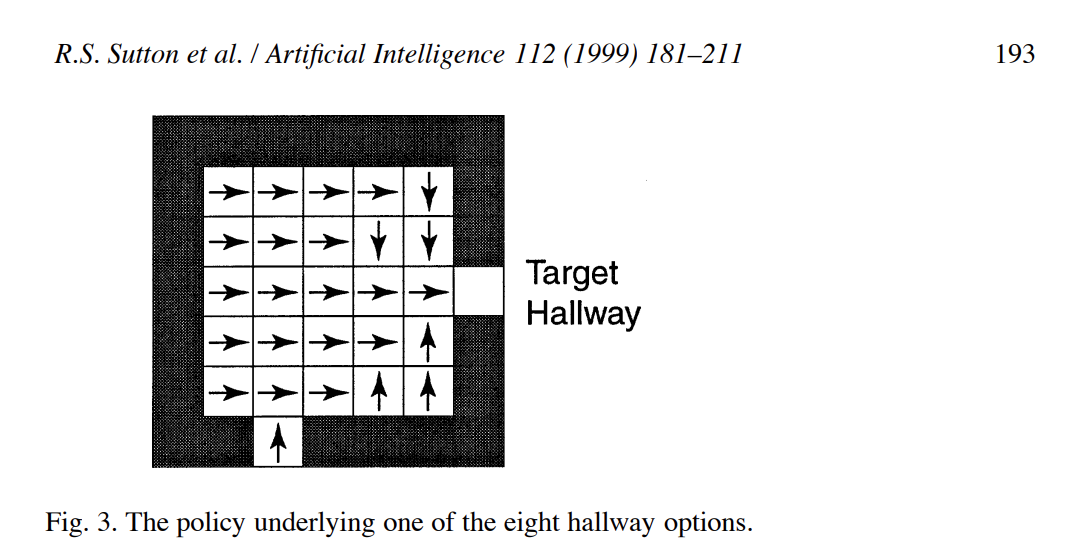
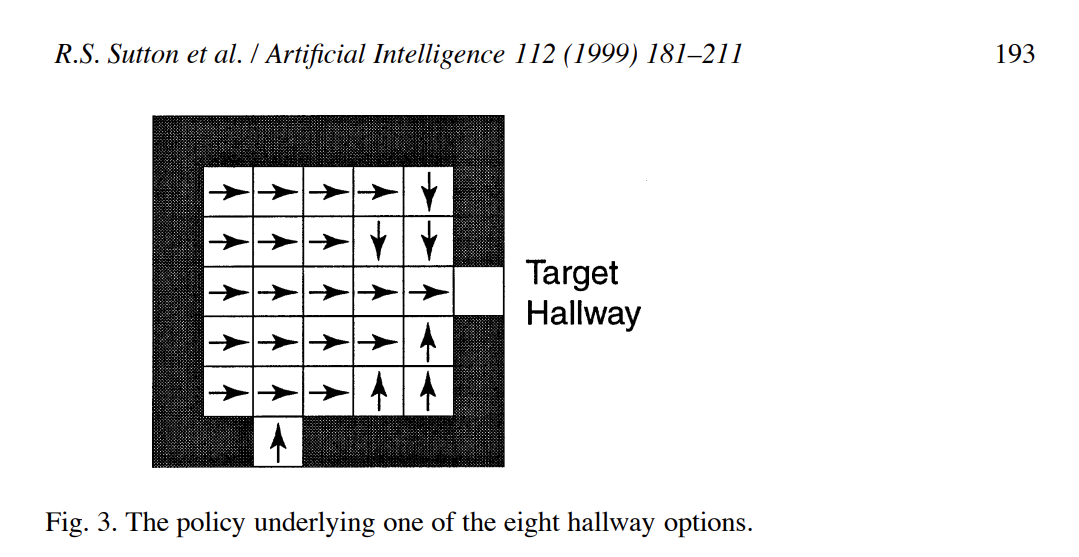
可以看到,上面的每个room有两个通道(两个空白格),这两个空白格(通道)可以分别作为一个option的target,除了target之外的其他空格都为可行区域(可以作为option的起始点),也就是所对原始任务进行划分后的每个room任务都是可以有两个option的,每个option的终点分布对应room边缘的target hallway。
给出一个room的其中一个option的状态值的示意图(该option的target为右侧边缘的空格,另一个option的target为下侧边缘的空格):
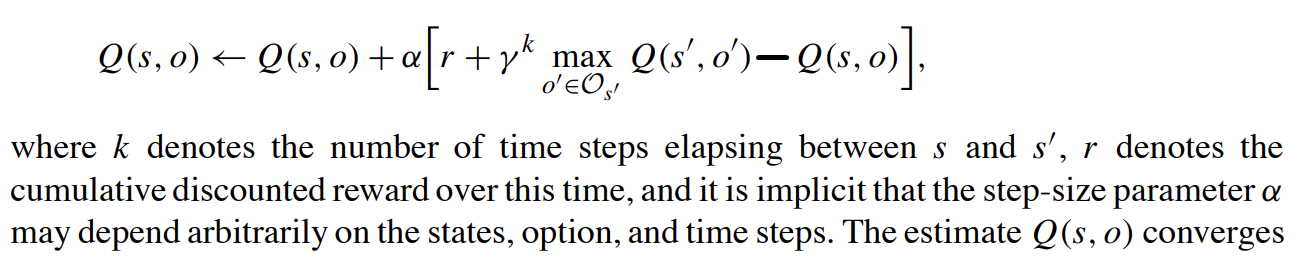
options算法的学习规则:(参数更新的具体方式)
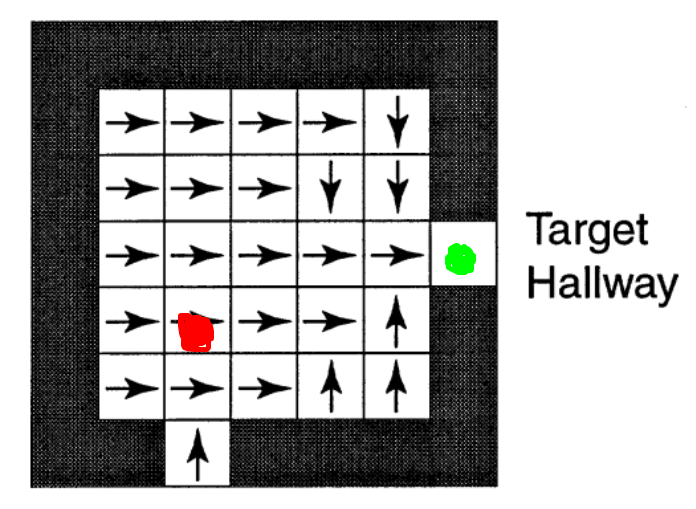
给出一个状态的option示意图:
假设下图中红色状态为s,绿色状态为 \(s^,\)。
红色状态在下图中的option的Q值记作Q(s, o),绿色状态的Q值记作Q(\(s^,\), \(o^,\))。
红色状态关于绿色状态的一次采样后的Q值更新具体为:
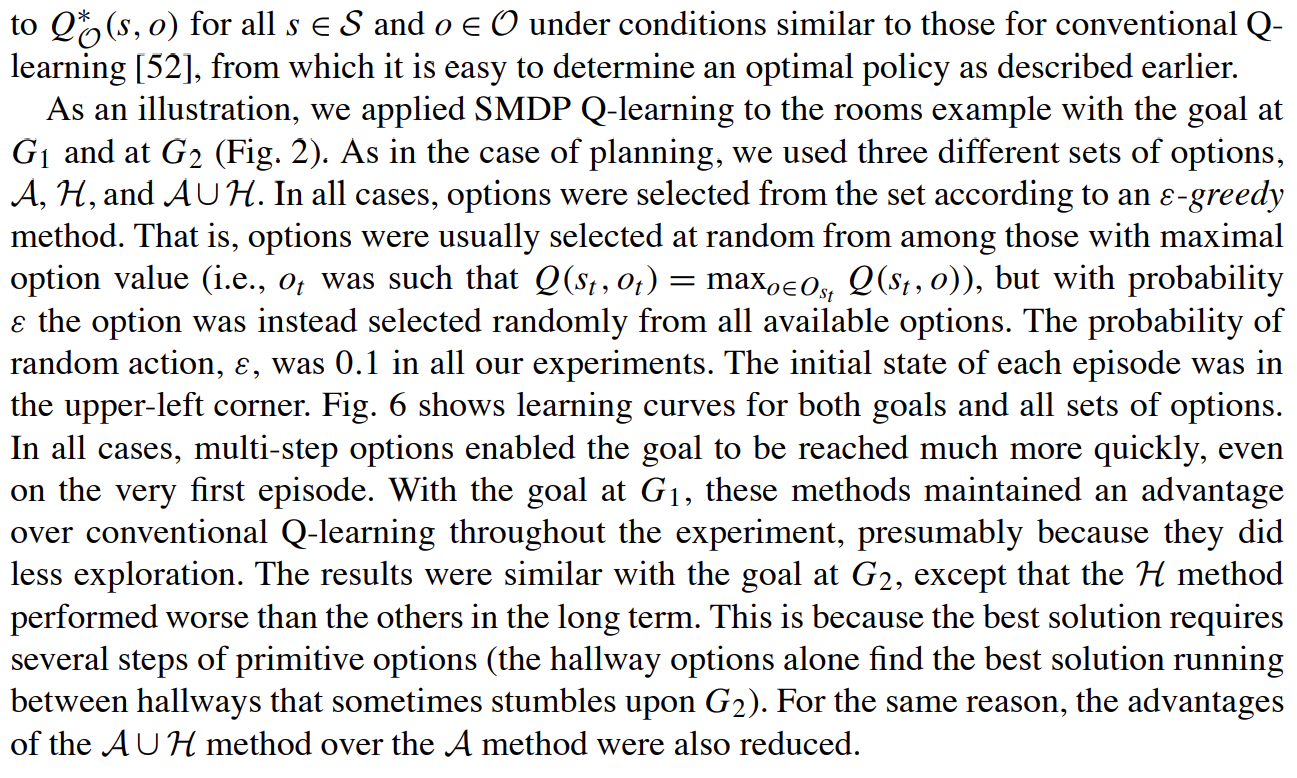
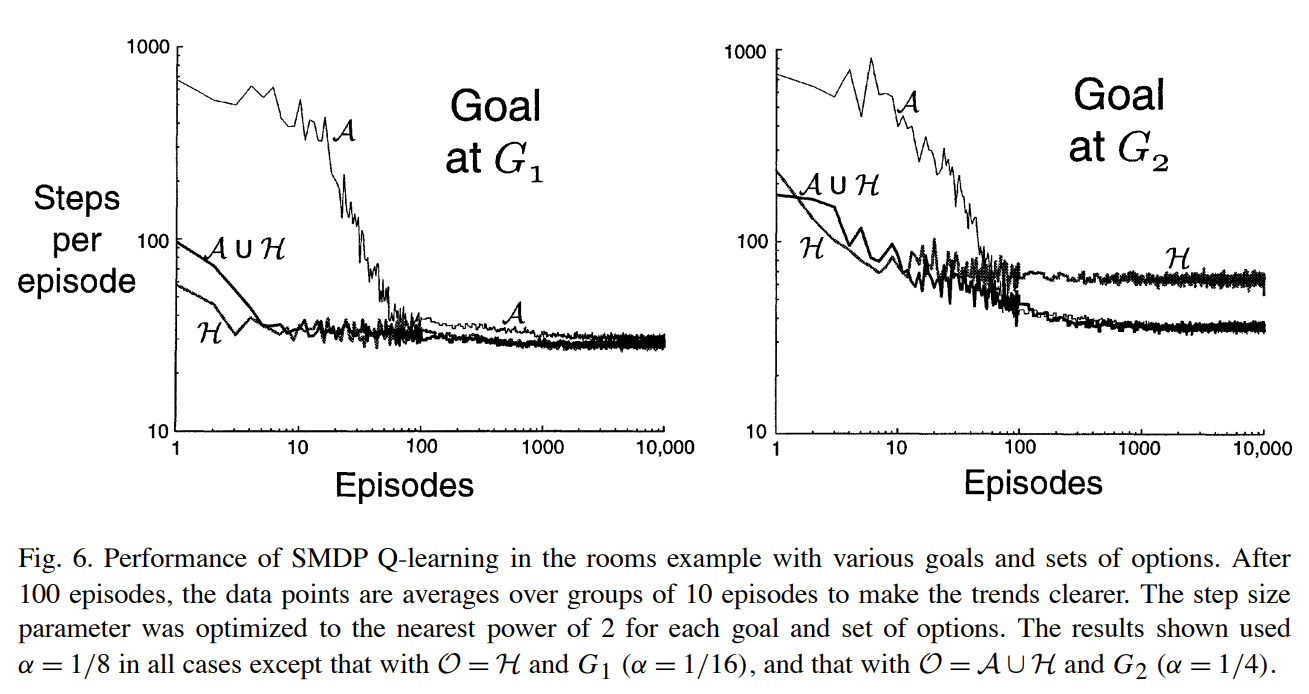
使用options方法来进行动态规划计算的一些不足:
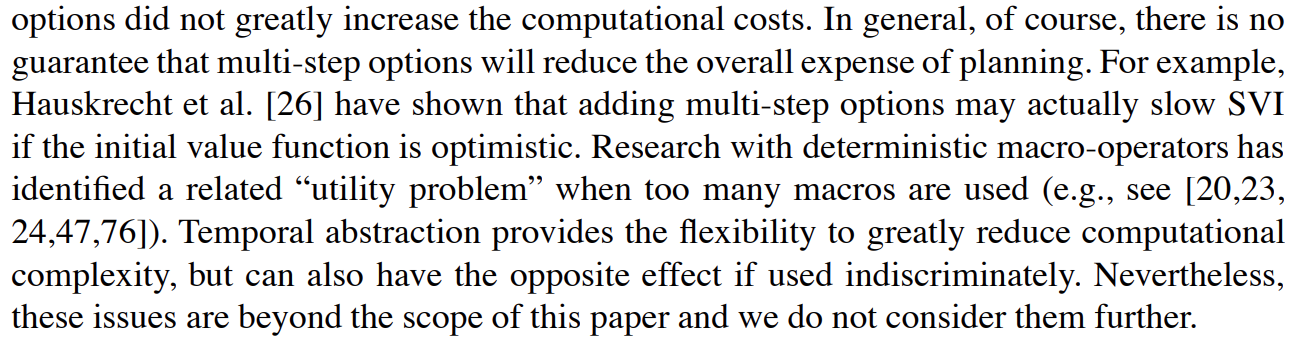
其中,最为注意的就是在使用options进行动态规划的话并不一定能保证加快计算(加快收敛);一般情况下动态规划时初始所有状态的状态V值为0,但是如果使用乐观的初始化方式(optimistic)那么就是在初始化时将所有的状态V值都初始化为一个较大的数值,比如为100,那么使用options这种multi-steps分层的方法反而会减慢值迭代的动态规划算法的收敛速度。
PS:
个人感觉,这个分层强化学习算法中的经典options算法其实和分层 \(A^*\) 算法很像,其基本思想是一致的,如果有读者不是很难理解这个options算法可以先去读“分层 \(A^*\) 算法”。
本文的options算法本质上是“表格型强化学习算法”。
分层强化学习算法options其本质就是对问题进行分层划分。
本文算法的解决方法是使用表格记录每个位置的状态值V(s)。
由于options发表的较早,20多年前发表的,因此这篇文章大篇幅谈的是动态规划算法,即如何使用options方法来提升动态规划算法的性能,然后才谈了options算法在learning算法上的一些应用。
posted on 2024-09-29 11:04 Angry_Panda 阅读(340) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号