NVIDIA的Isaac AMR产品介绍
NVIDIA的Isaac AMR是仓库自动运货机器人项目,说直白些就是一个AGV的小车,不过和传统的AGV不同,NVIDIA推出的这个产品是智能化的。传统AGV小车的运行代码都是写死的,直接把运行命令写到了AGV里面,然后这个小车就只能按照预先的设定来进行运行,但是NVIDIA的这个产品是智能化的,是可以根据实际的运行情况自动调整的,代码不是写死的,而是使用深度学习这种end-to-end的方法来进行驱动的。
虽然我个人觉得这个产品好像对实际落地意义不大,因为仓储的AGV已经有几十年的应用技术了,之前的用单片机写死运行代码的这个模式也是有了几十年的应用,在全球的大型仓储公司都是标准配置,在国内不论是阿里、淘宝、京东、联想,等等都是使用的这个方案的。
注:
自动导向车(Automated Guided Vehicle,简称AGV),也称为自动导向搬运车、自动引导搬运车。
传统的长这样:

和这样:

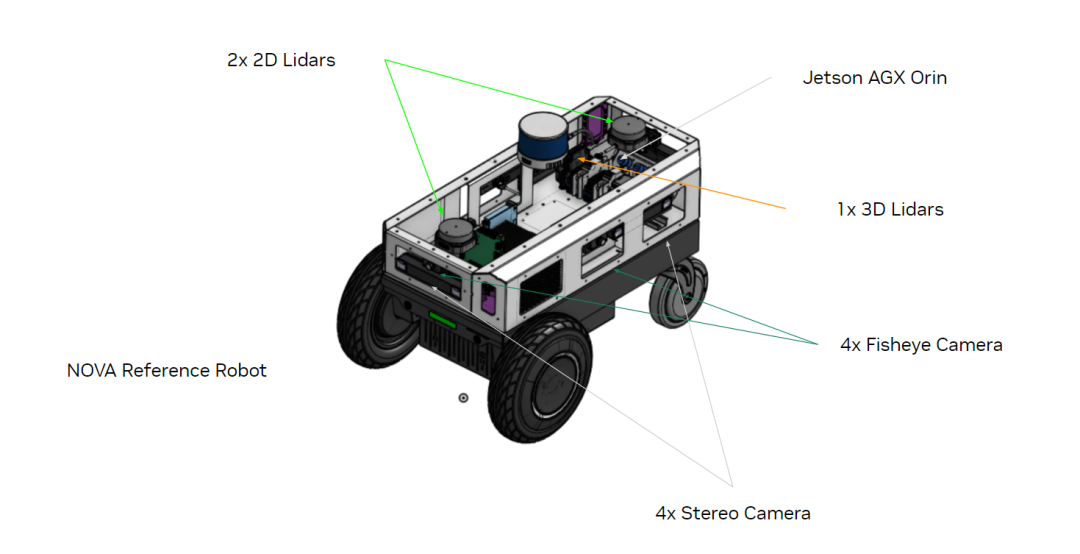
NVIDIA的AMR长这样:

NVIDIA的这个产品包括两部分,第一部分是软件,第二部分是芯片,芯片这部分比较好理解,说白了就是显卡,不过这里的显卡是移动版本的板载芯片。软件部分,NVIDIA利用自有的元宇宙平台做仿真,然后使用自己的深度学习模型(开源的和自己研发的都有)做物体识别、环境感知、地图绘制、三维感知、激光雷达的3D图像感知、路径规划,等等,这里的路径规划使用A* 类的AI算法,3D图像使用的是三维点云和NeRF(神经网络辐射场),环境感知用Occupancy Networks等等。
可以说NVIDIA的这个AI产品其实更像是把自动驾驶上的AI感知算法移到了AGV上。
该产品的AI模块的几个组成部分:
AMR使用NVIDIA Metropolis做物体识别,如识别前方是否有人,有没有东西调到前面阻碍道路,取货的时候可以识别到要取的物品等等,或者可以识别仓库有多少人,这个东西用的深度学习的模型应该是以开源的模型为主,这东西感觉更像是一个移动版本的监控器。
DeepMap集成了3D点云、Occupany Network、SLAM,等等,主要是进行3D环境感知和地图绘制。
cuOpt集成了路径规划算法,也就是A* 算法,HPA* 算法,等等,也就是给仓库的地面做网格分层,然后根据前面的感知和地图所给出的通行信息(哪条路径不能通行了,需要重新计算通行路径)。
这个产品说直白了就是在AGV上安装了AI模块,可以识别物体,可以感知3D环境,可以构建3D地图,可以根据环境信息(哪条路阻塞)来规划路径(PathFinding)。这个产品的意义感觉更多的为NVIDIA以后的上层产品做技术铺垫和积累,比如以后搞自动驾驶和人形机器人等等,同时也给NVIDIA的元宇宙产品搞了一个落地的结合产品。

官方地址:
Isaac AMR:https://developer.nvidia.com/isaac/amr
相关:
https://www.elecfans.com/d/2097151.html
https://baijiahao.baidu.com/s?id=1767393012388823893
https://tv.sohu.com/v/dXMvMzM1OTQyMzQzLzMxNjExMzgxMi5zaHRtbA==.html
https://zhuanlan.zhihu.com/p/670884028
https://v.qq.com/x/page/c1469ph2z7z.html
PS. 个人认为这个在AGV上安装AI的感知模块主要用处就是可以有更好的适用性,对环境更鲁棒,泛化性更好,但是仓库这种环境不应该是一次设置好后就不太会改动的运行环境吗,当然我不是这个领域的,这也是个人的观点。如果有一些仓库环境变化比较频繁,对运货机器人要不断的改代码,做调整和重新设置,那么这个AI版本的或许会有更好的表现。
posted on 2024-05-05 11:25 Angry_Panda 阅读(240) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号