HPA* (Near Optimal hierarchical Path-finding)算法的效果图
本文中的图全部来自:
https://mohitsharma0690.blogspot.com/2016/01/hierarchical-pathfinding.html
图的说明:
Here is an example of how clusters are created in an open space environment. The white squares represent walkable grids. Non-walkable grid spaces are marked with black (missing here). The nodes marked as grey are part of the abstract graphs. The red lines are the edges in the abstract graph. All of the edges are bidirectional.
使用A* 算法的效果图,从红色点到绿色点寻找路径:
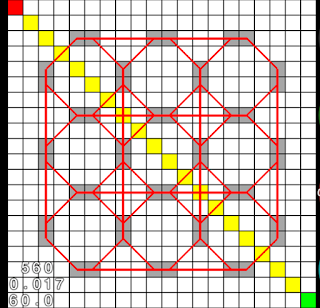
使用HPA* 算法后寻找路径的效果图:
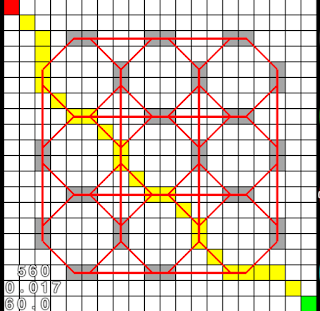
我们可以看到,最后的HPA* 寻找路径一定在红色线上(不同块之间的路径一定在红色线上,也就是黄色路径一定和部分红色线重合,启始块和目标块的内部路径不在红色线上,这里的分割块就是算法描述中的cluster)
要知道这样一个问题,如果cluster分割块的size过大,也就是分割块过多的情况下,那么HPA* 的寻找路径一定和A* 算法的寻找路径有较大的不同,根据上图我们可以看到,如果红色的网格过于稀疏那么HPA* 算法的黄色线由于必须和部分红色线重合,因此会和原始的A* 算法的黄色线有较大的差别。
但是,如果cluster的size过小,也就是分割块过多,那么必然增加整体的运算时间,降低运算效率。
在文章最后给出了下面的一个寻路图:(复杂难度的)

在上图中使用HPA* 算法是难以获得A* 算法相类似的路径的。
在寻路难度较大的问题,如复杂的迷宫问题,HPA* 的性能有可能没有A* 算法的高。
posted on 2024-05-02 09:02 Angry_Panda 阅读(366) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号