
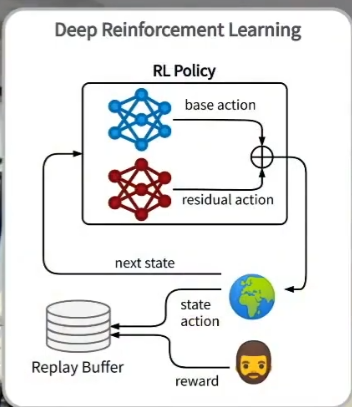
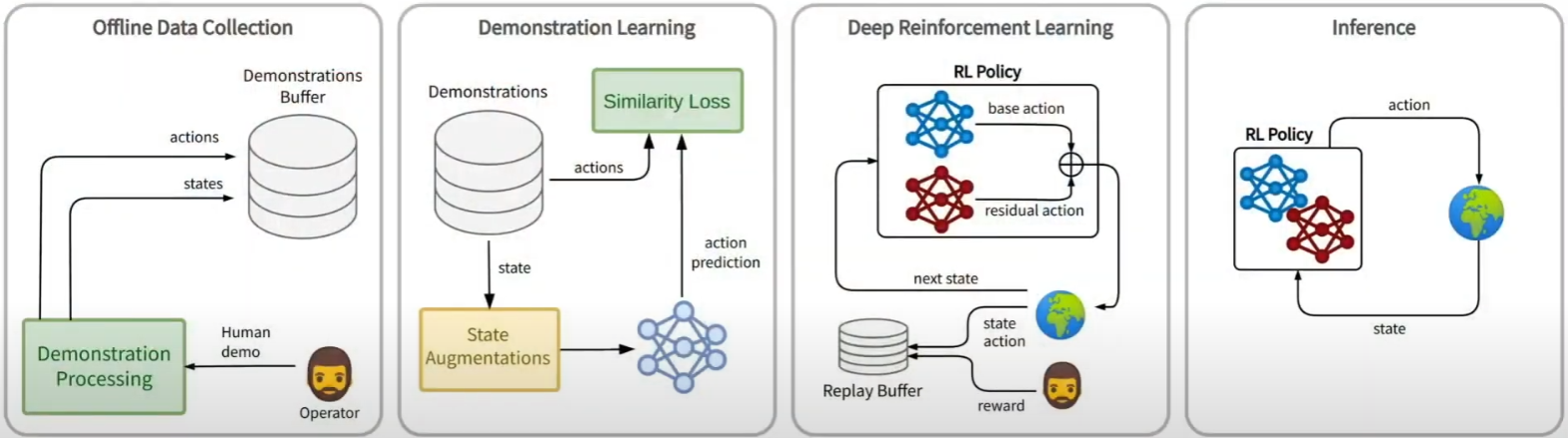
人形机器人的模仿学习、离线学习 —— 算法流程示意图
相关:
https://www.youtube.com/watch?v=TctNb7DPRtA
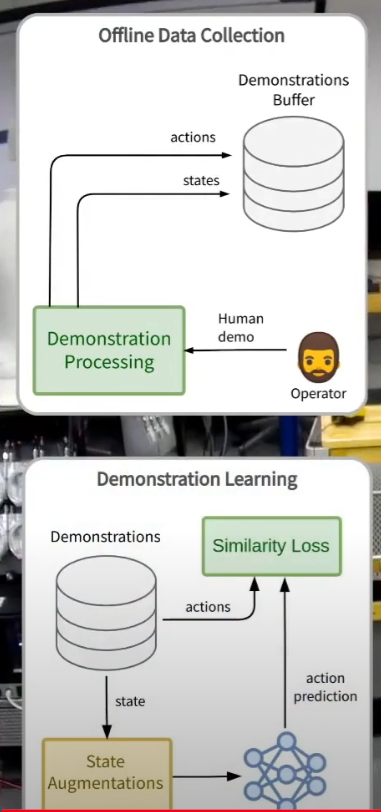
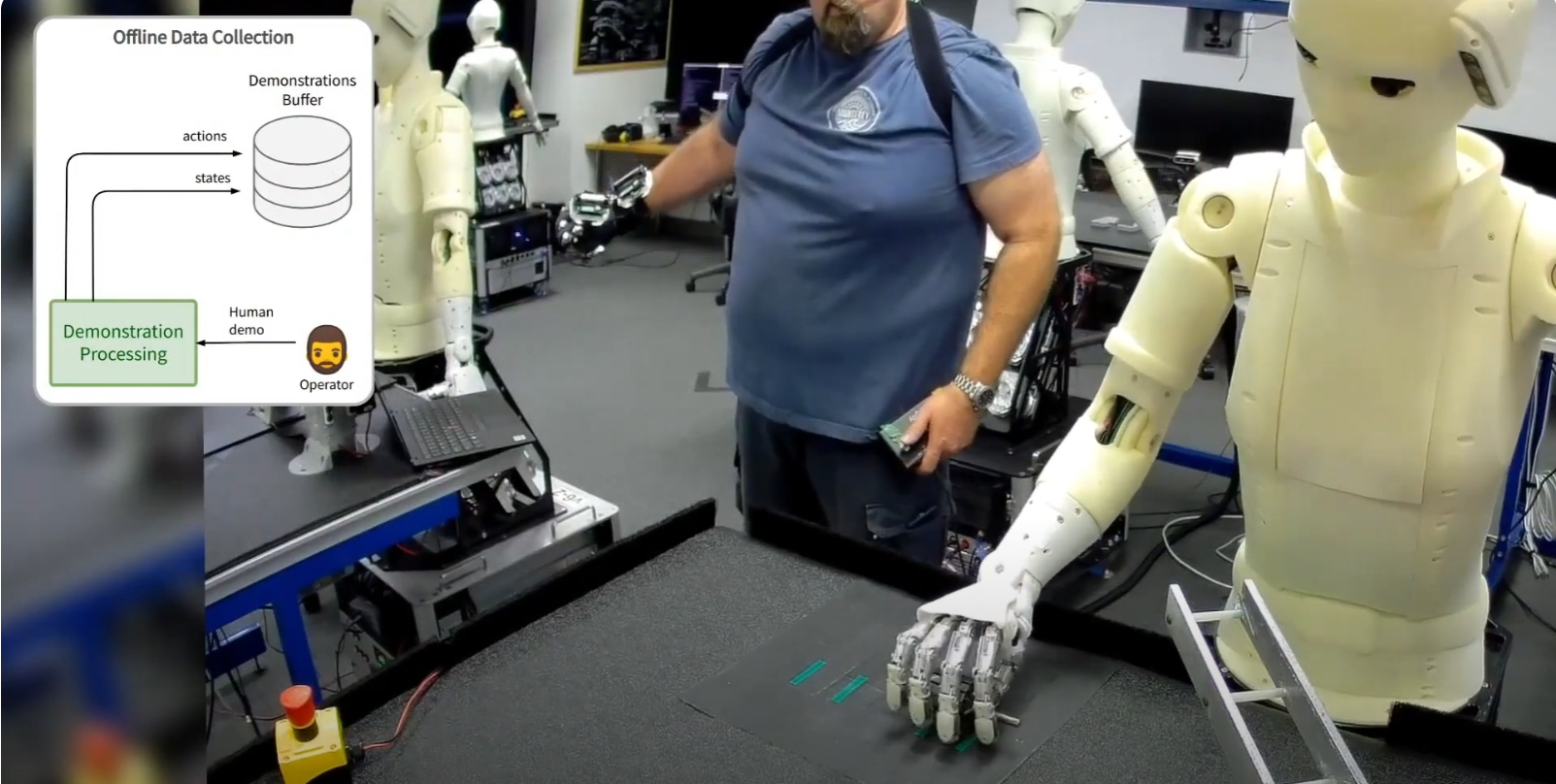
人类的真实数据的收集:
人类通过远程控制器实时的控制机器人操作,并且将机器人的操作数据记录下来。
注意:
这里虽然是使用人类的真实操作数据,但是其实是人类操纵机器人执行动作后的数据,这部分真实物理世界下的数据是通过记录机器人的具体操作来实现的。
整体流程:
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-04-19 11:03 Angry_Panda 阅读(78) 评论(0) 编辑 收藏 举报


