【节选 转载】人形机器人Optimus擎天柱技术解析
参考原文:
https://www.sohu.com/a/589454391_383324?scm=9010.8000.0.0.1265
可以利用动作捕捉“学习”人类动作,依靠视觉的AI算法和学习,机器人能知道手在空间的位置,并准确拿取物品。
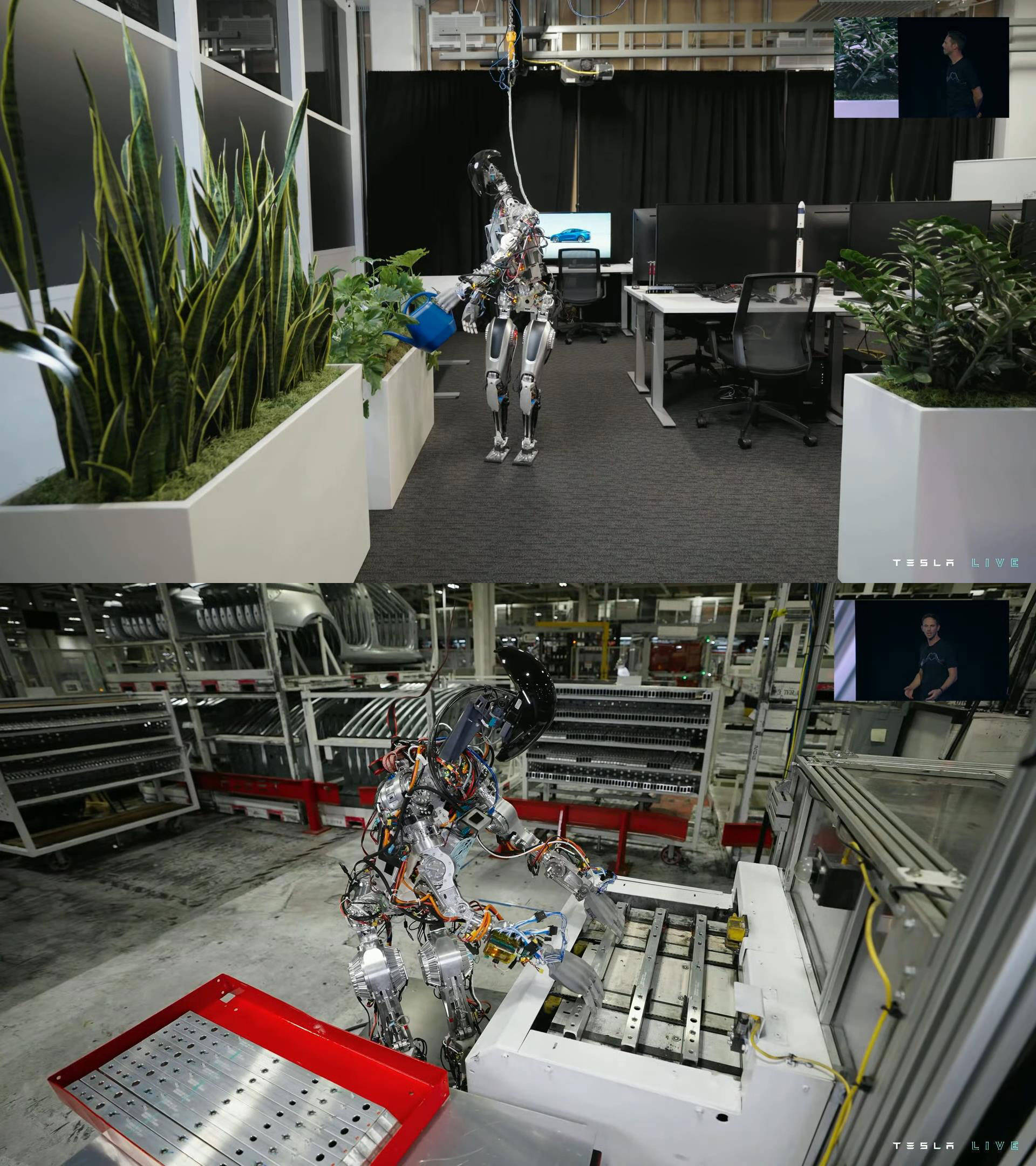
Optimus擎天柱感知世界的方式和人类一样,都是视觉。
可以看到,不同的物体被以不同的颜色划分;而在后端,环境感知是以“Occupancy Network”的形式存在的。
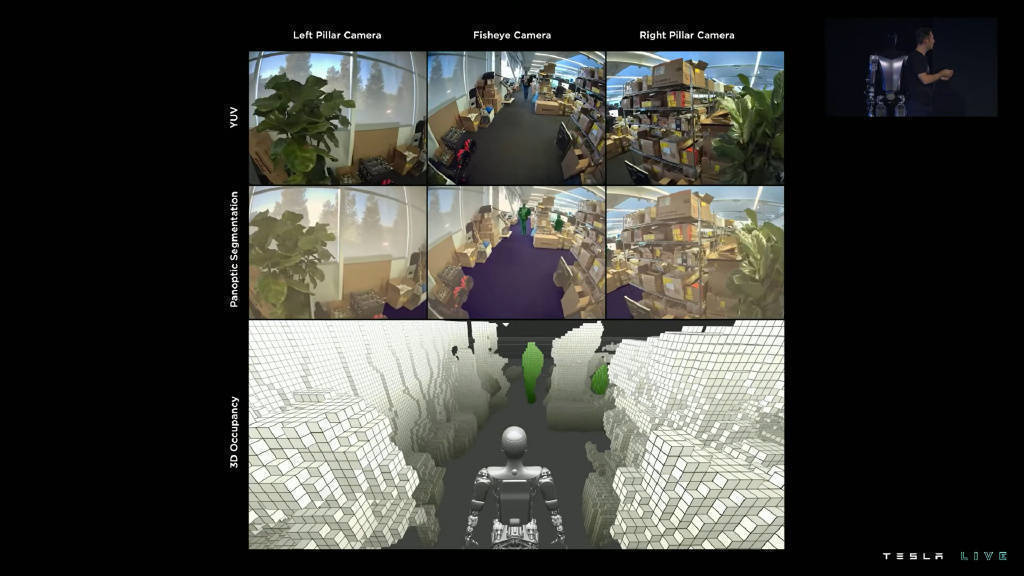
可以看到,摄像头的图像在“Occupancy Network”中被处理为一个一3D染色方块,白色方块表示静止物体,包含大小高度占用体积等关键信息;绿色方块表示移动物体,需要对每一个绿色的染色块进行行为预测。
摄像头拍摄现实世界的图像,随后使用“Occupancy Network”等等算法进行物体检测、行为预测、动作规划(locomotion plan) ,再将运算结果输出给各个负责执行的电动关节。
节选自:
https://www.sohu.com/a/589454391_383324?scm=9010.8000.0.0.1265
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
posted on 2024-03-28 20:16 Angry_Panda 阅读(182) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号