
人形机器人 —— Figure 01机器人亮相 | OpenAI多模态能力加持 | 与人类流畅对话交互 | 具身智能的GPT-4时刻
视频地址:
https://www.youtube.com/watch?v=vO1wnHA0tZg
Figure AI 公司主页:

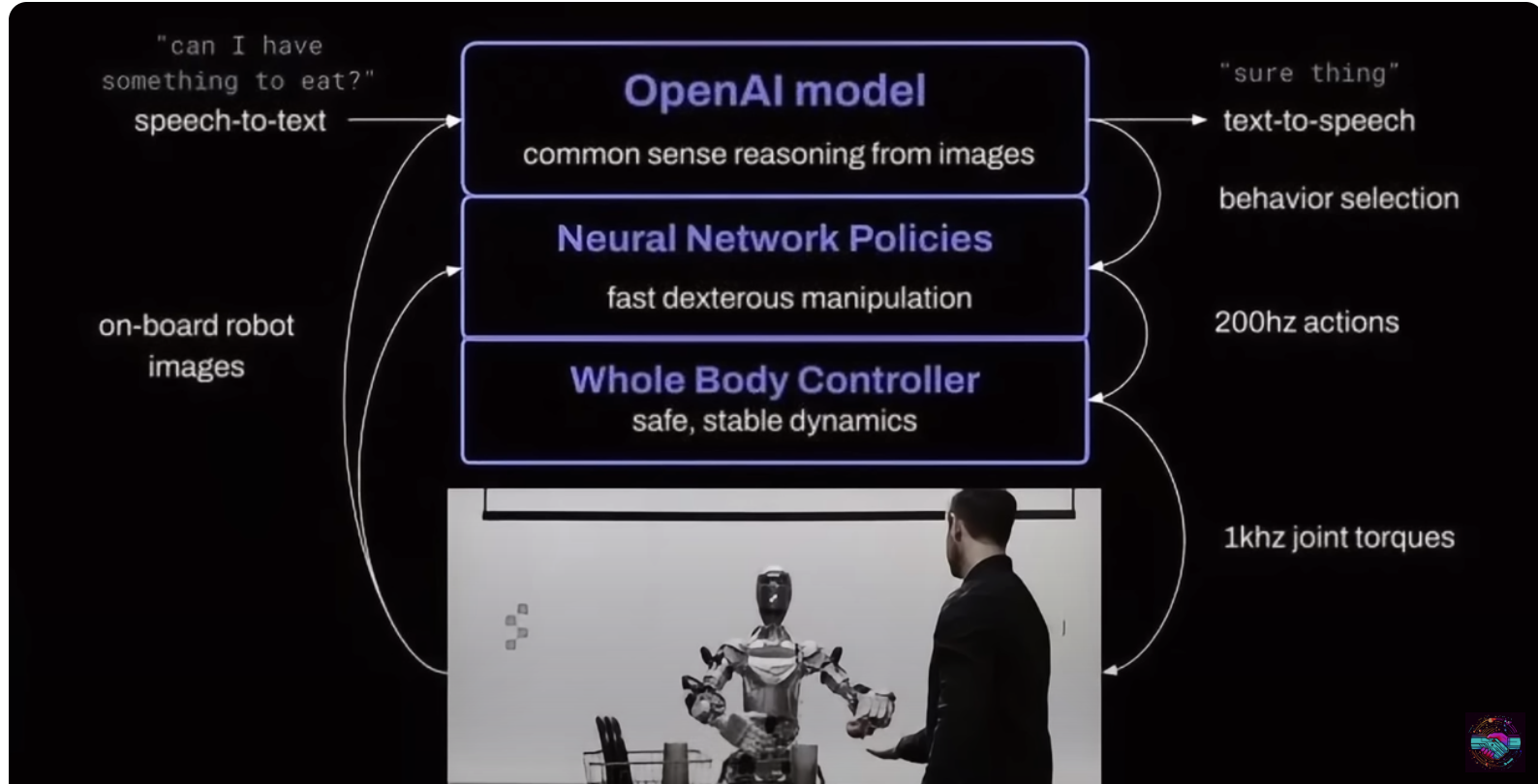
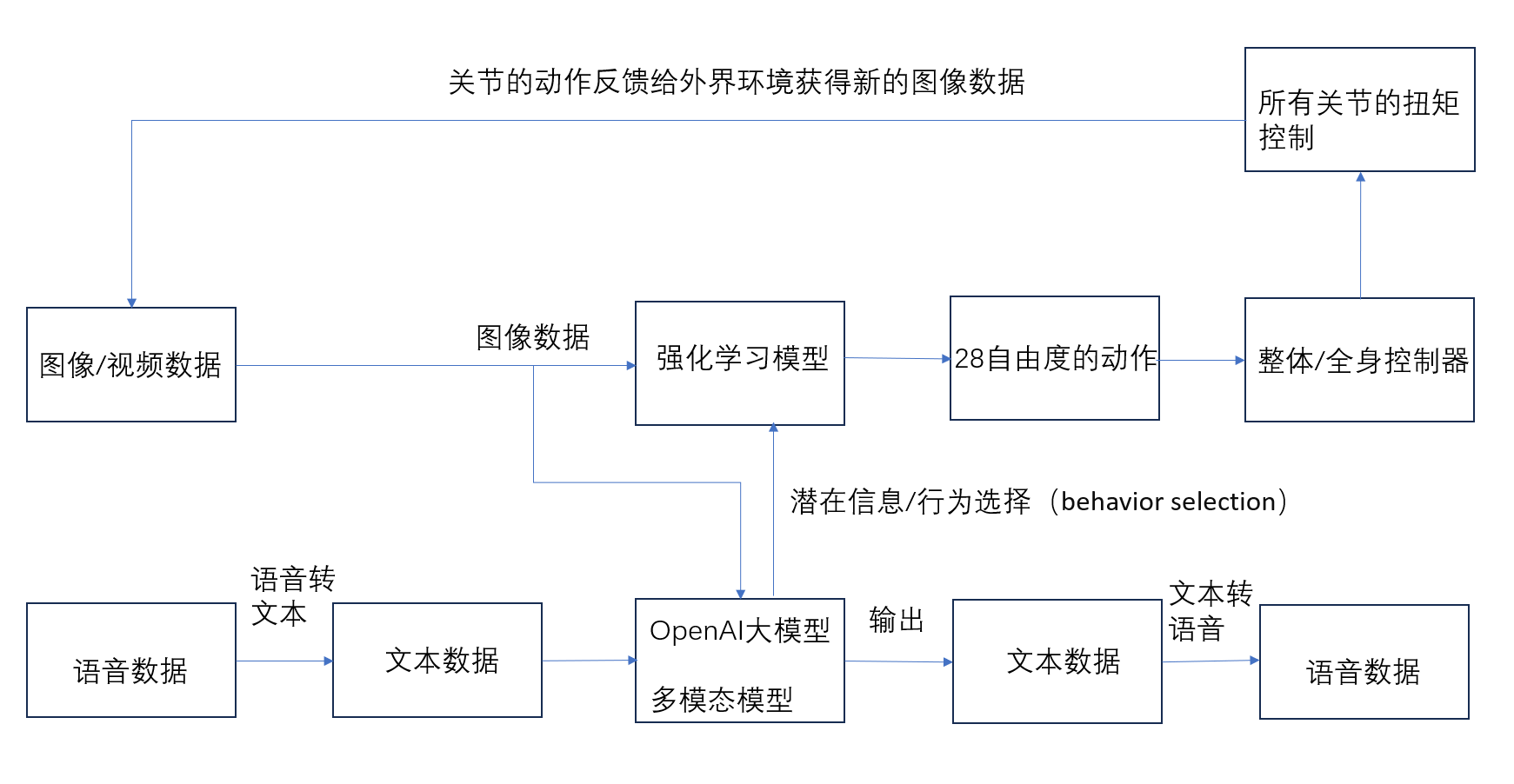
根据Figure 01机器人的工作示意图可以得到下面的流程示意图:
人形机器人可以分为软件和硬件两部分,硬件部分包括电子控制、机械设计制造、电池、电机设计/控制、传感器,等等;软件包括图像识别模块(物体识别)、语音识别模块、语音转文字模块/文字转语音模块、大模型的对话系统模块、大模型的多模态系统模块、导航模块(SLAM等)、3D点云(计算机视觉)、NeRF(Neural Radiance Fields)(计算机视觉)、强化学习(智能决策),等等。
需要知道,硬件是软件的载体,没有硬件的支撑软件是无法发挥作用的,很多公司搞humanoid的主要桎梏是硬件而不是软件,但是硬件往往需要耗费主要的费用和精力,并且硬件的发展是极有可能被其他公司的技术替代掉的(某公司新设计一个电源、某公司新设计一个扭矩更好的电机、某公司新设计一个灵敏度更高的机械手,等等),可以说搞人形机器人的真正的门槛其实是硬件而不是软件。
但是硬件往往费用高,积累多,设计周期长,如果一个公司的目标不是自己搞出一个可以面世的人形机器人,而是要做这方面的积累和尝试,也或者是想要入门这个领域,那么可以从软件层面上先入手,比较人形机器人的软件领域也是要求极难其极为广泛的。
可以说,人形机器人的软件层面其实只有:
- 视觉模块/导航模块;
- 语言模块;
- 决策模块;
视觉模块,可以有3D点云(计算机视觉)、NeRF(Neural Radiance Fields)等等;导航模块,如:SLAM等等,但是由于导航模块可以和视觉模块耦合在一起,,并且导航模块往往可以和决策模块或规划模块耦合在一起,所以导航模块可以不单独列成一个模块。
语言模块,这里是指大模型,但是往往语言模块和视觉模块也有很强的耦合,比如都交给多模态大模型模块处理。人形机器人的直接输入输出并不是语言而是语音,因此我们还需要语音与语言转换模块。
决策模块,根据视觉模块和语言模块提供的信息,也包括从导航系统提供的模块,也包括从多模态模糊提供的信息,得到下一步动作,该动作往往不是对电机的扭矩的直接控制,而是电压等信息,这个动作还需要交给电子控制器转为扭矩控制信息,最终的扭矩信息交给电机进行具体执行。


posted on 2024-03-16 10:55 Angry_Panda 阅读(166) 评论(0) 编辑 收藏 举报










【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】
2022-03-16 【转载】 机器人真·涨姿势了:比肩人类抓取能力,上海交大、非夕科技联合提出全新方法AnyGrasp
2022-03-16 康师傅方便面还能吃吗?—— 如何解决“土坑酸菜”现象,如何看待康师傅对食品安全的轻视问题
2018-03-16 最新解决 Ubuntu16.04 和 win10 双系统时间同步问题 (设置为 UTC 时间)