
机器人的运动控制是否可以引入生物学信息,生物学信息是否可以辅助机器人的智能控制算法的训练:《Robotic prosthetic ankles improve 'natural' movement, stability》
相关内容:
Robotic prosthetic ankles improve 'natural' movement, stability
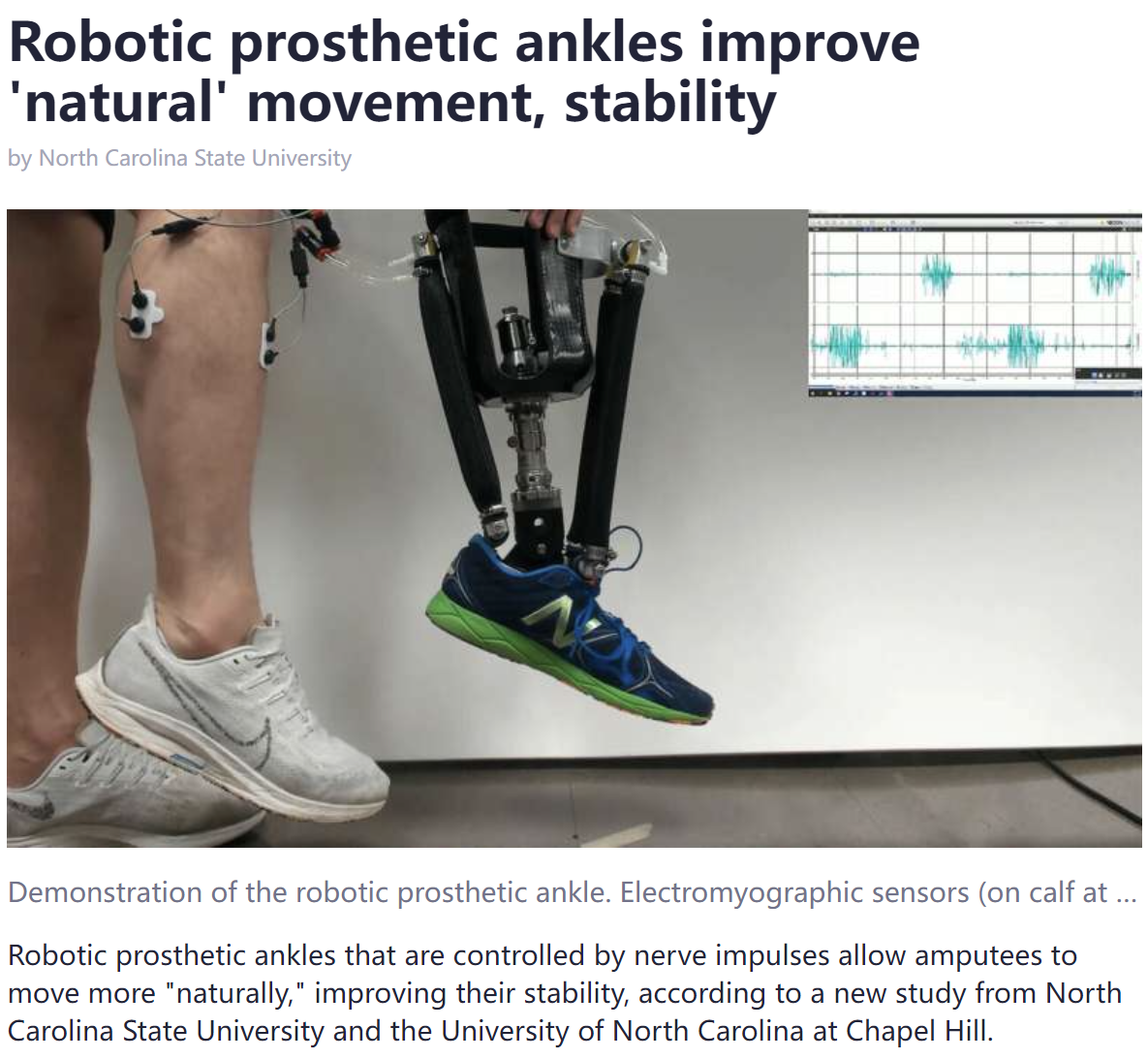
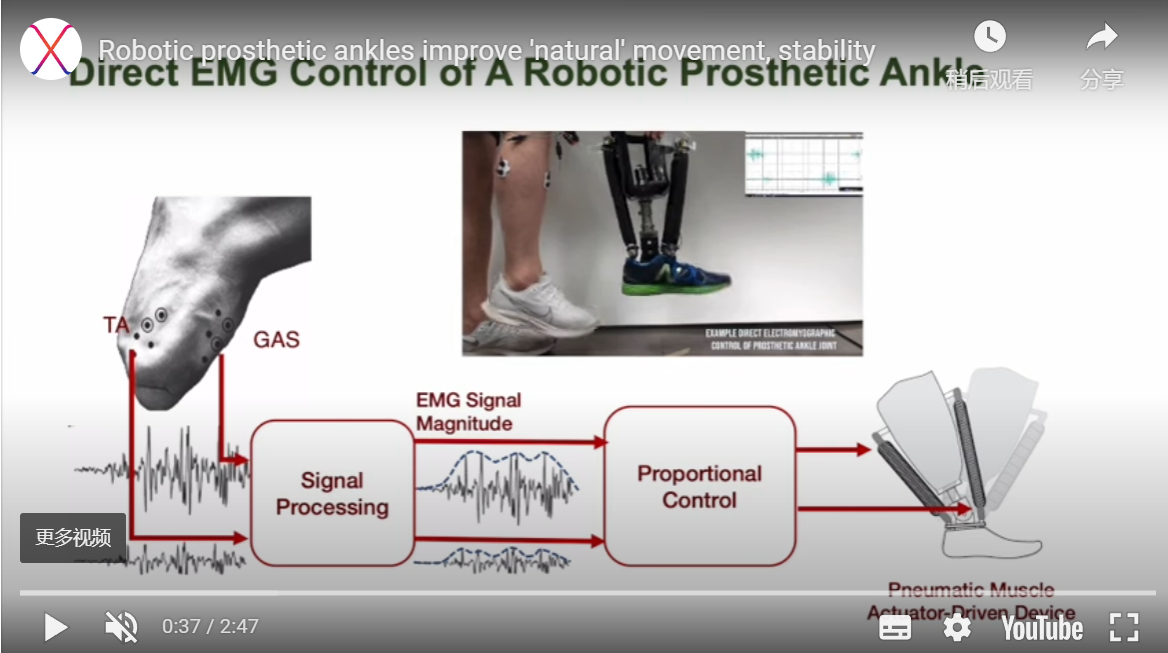
看了上面的论文的介绍(内容没看到,不是open access论文),论文的主要思想就是利用人体腿部的神经信号来控制假肢脚踝的控制,从而使单侧下肢截肢后使用假肢的人获得更好的行动稳定性。
这个研究的实验对象是单侧下肢截肢后的人,也就是说他必须要有一侧假肢是正常的,而且该实验限制实验对象必须进行双腿相同的动作,也就是双脚保持不动的动作,然后上半身进行一定的前后运动,这样人体左右侧下肢的控制是相同的,这样也就可以利用正常的那一侧肢体的肌肉神经脉冲信号来控制另一侧假肢脚踝的控制。
通过相关的网页资料显示,这个假肢脚踝的控制在真人实验之前是需要经过预先训练和控制调整的,也就是先用一个下肢正常的人的下肢运动的肌肉神经脉冲信号来控制这个假肢的脚踝。
PS. 看了这个资料,一个想法就是机器人的运动控制是否可以引入生物学信息,生物学信息是否可以辅助机器人的智能控制算法的训练。比如双足机器人或四足机器人是否可以引入一定的生物学信息来进行训练,比如训练石足机器人的时候,我们可以对真实的狗的运动时的肌肉神经脉冲信号来辅助训练,当然这个过程我们可能需要对真实的狗肢体运动做一点的限制,比如打上夹板,不允许真实狗的躯干运动等。
虽然有些异想天开,但是在机器人的控制算法上如果能引入真实生物学的信息或许真的可以起到不错的效果。
本博客是博主个人学习时的一些记录,不保证是为原创,个别文章加入了转载的源地址,还有个别文章是汇总网上多份资料所成,在这之中也必有疏漏未加标注处,如有侵权请与博主联系。
如果未特殊标注则为原创,遵循 CC 4.0 BY-SA 版权协议。
标签:
杂谈


posted on 2024-01-23 19:52 Angry_Panda 阅读(14) 评论(0) 编辑 收藏 举报










【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· winform 绘制太阳,地球,月球 运作规律
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
2023-01-23 【转载】专利摘要翻译之机器翻译错误类型
2021-01-23 自动判断网络连接状态,如断网则自动进行联网 (特定环境:某高校校园网)
2019-01-23 南京大学俞扬博士:强化学习前沿(下) (转载)
2018-01-23 递归遍历嵌套结构(多层List)中的元素 ------Python