


RANSAC 剔除错误匹配 估计模型
随机抽样一致,这个算法,我以前一直都没有理解透彻。只知道可以用来直线拟合,网上大多数中文博客也都是写直线拟合的,但是用来匹配二维特征的时候,总还是没弄明白。
基本概念参考 http://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html
写得已经够清楚了。
现在我来说说它在匹配特征时候的应用。
————————————————————————————————————————————
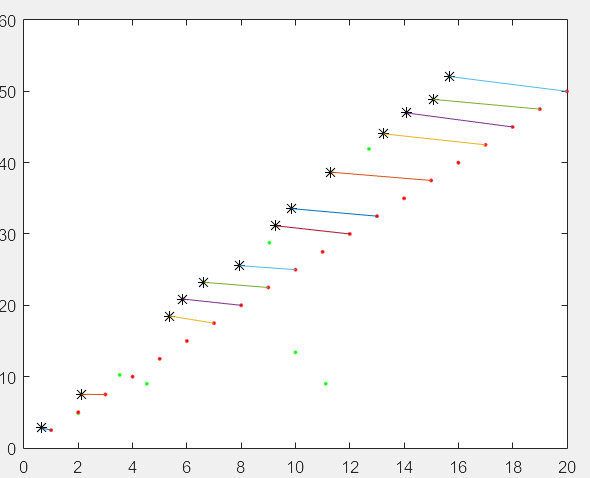
假如我有两组数据,M和T,其中T是由M经过一个旋转和一个平移得来的。
T=R*T+t
R=[cos(sita) -sin(sita); sin(sita) cos(sita)]
t=[tx;ty]
我现在已经大概知道了M的每组数与T的每组数据的对应关系 match,
match=[1 2; 3 4;5 6;……]
意思是:M的第1个 对应T的第2个;
M的第3个 对应T的第4个;
其中有一些对应错了。并且我不知道这个模型是啥。
我现在要做的,就是对这些东东进行ransac算法,找出这些错误的对应 outlier ,找到其中正确的对应,并求出这个模型 R 、t
————————————————————————————————————————————
算法如下
1. 从match 里面,随机找出n组(n>=2,因为是三个未知数 sita tx ty,每组数可以列俩方程,所以四个方程已经够求三个未知数了)
2. 对这n组,求出R t, 具体方法可以使用svd法求刚体最小二乘转置 http://blog.csdn.net/kfqcome/article/details/9358853
3. 对这个求出来的R t,应用到T上,得到T';结合match,找出T’中,不靠谱的(自己设一个阈值),就是outliers,靠谱的inliers
4. 对inliers的点,如2一样,求出新的R t
5. 评价这个模型,比如再进行一下3,求出inlier,inlier数目作为评价标准;或者inlier对M的误差作为标准。如果这个模型好 R_best=R t_best=t
6.重复以上过程k次,最后的R_best t_best就是结果了。
—————————————————————————————————————————————
就这样,可能哪里理解的不对,以后再改吧。目前来看,效果还是不错的。

