【Hector slam】A Flexible and Scalable SLAM System with Full 3D Motion Estimation
作者总结了SLAM前端和后端的区别
While SLAM frontends are used to estimate robot movement online in real-time,
the backend is used to perform optimization of the pose graph given constraints
between poses that have been generated before using the frontend.
前端 用来在线实时估计机器人运动,
后端用来优化位姿
而这篇文章服务于SLAM前端,并不提供后端优化。可以估计6DOF呢。
our system has to estimate the full 6DOF state consisting of translation and rotation of the platform.
To achieve this,the system consists of two major components.
A navigation filter fuses information from the inertial measurement unit
and other available sensors to form a consistent 3D solution,
while a 2D SLAM system is used to provide position and
heading information within the ground plane.
******** 我关注的重点在2D slam
数据点的预处理是必不可少的
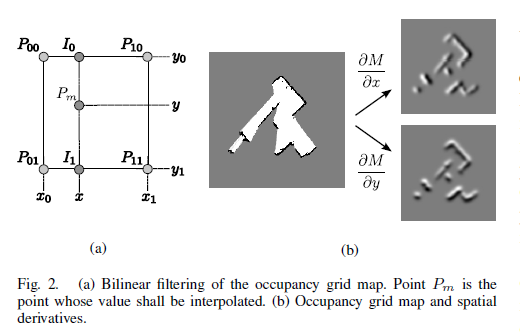
A 然后建图:双线性滤波估计占据栅格的概率
B 帧间匹配:高斯牛顿方法,不需要建立点之间的关系
Our approach is based on optimization of the alignment of beam endpoints with the map learnt so far.
The basic idea using a Gauss-Newton approach is inspired by work in computer vision
[19 An iterative image registration technique with an application to stereo vision (darpa)].
Using this approach, there is no need for a data association search between beam endpoints or an exhaustive pose search.
As scans get aligned with the existing map, the matching is implicitly performed with all preceding scans
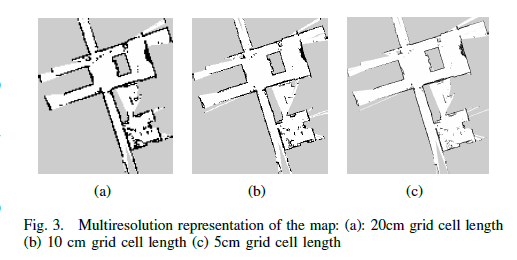
C 多分辨率地图表示
像图像金字塔一样,帧匹配的时候,从最粗的地图开始,结果作为下一精度匹配的初始估计。
The scan alignment process is started at the coarsest map level, with the resulting
estimated pose getting used as the start estimate for the next level