
DR7808 配置笔记
CSA部分:
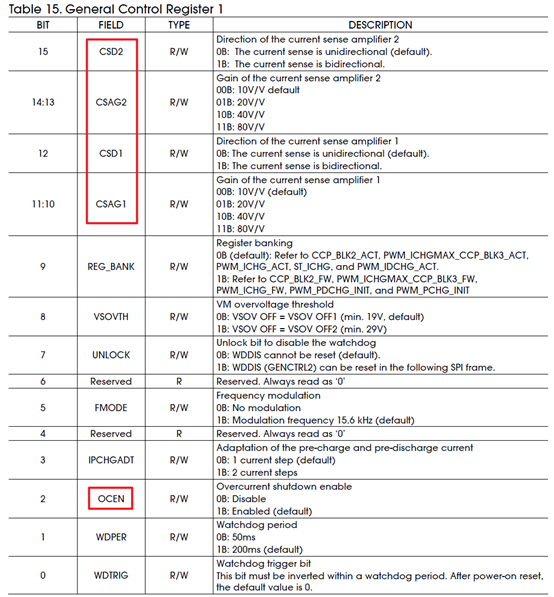
内部CSA可以配置为单向,或者双向,一共有两个CSA,内部CSA的GAIN可以配置,挡位有10,20,40,80四种增益选项。
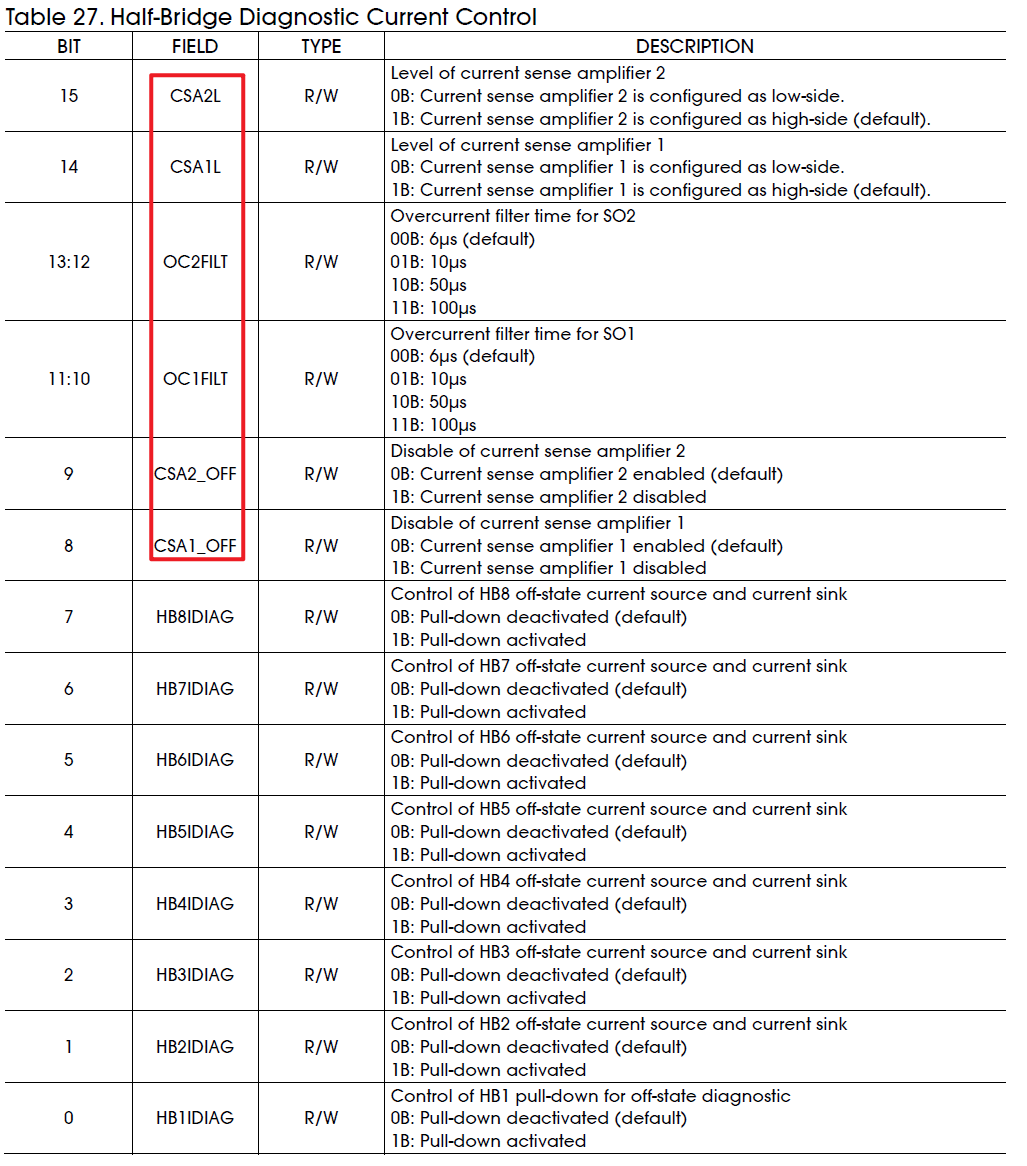
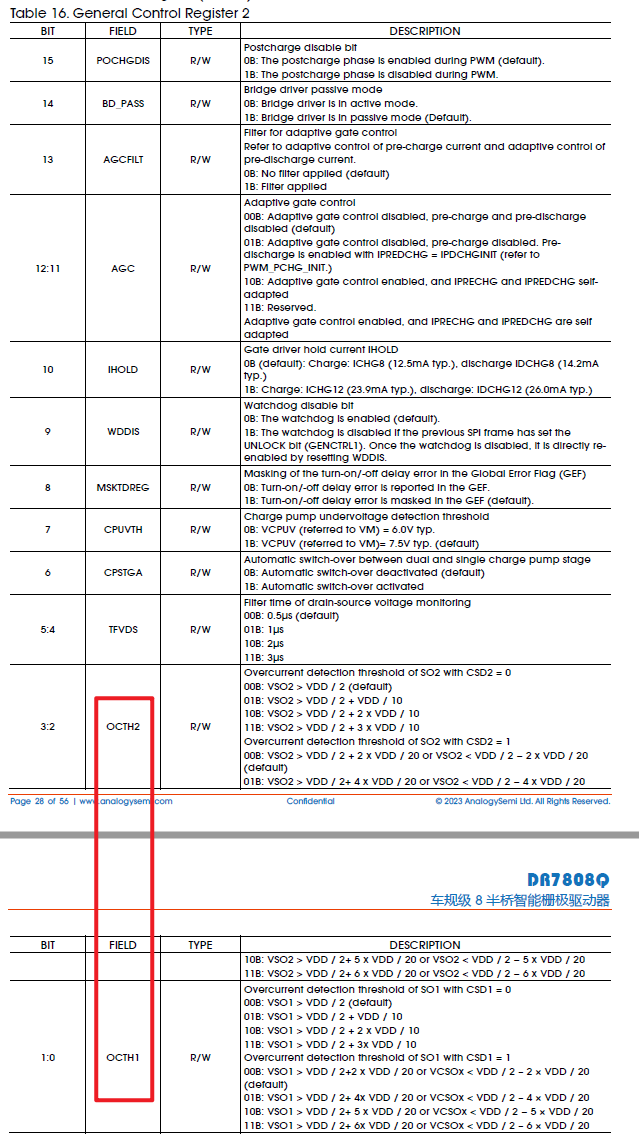
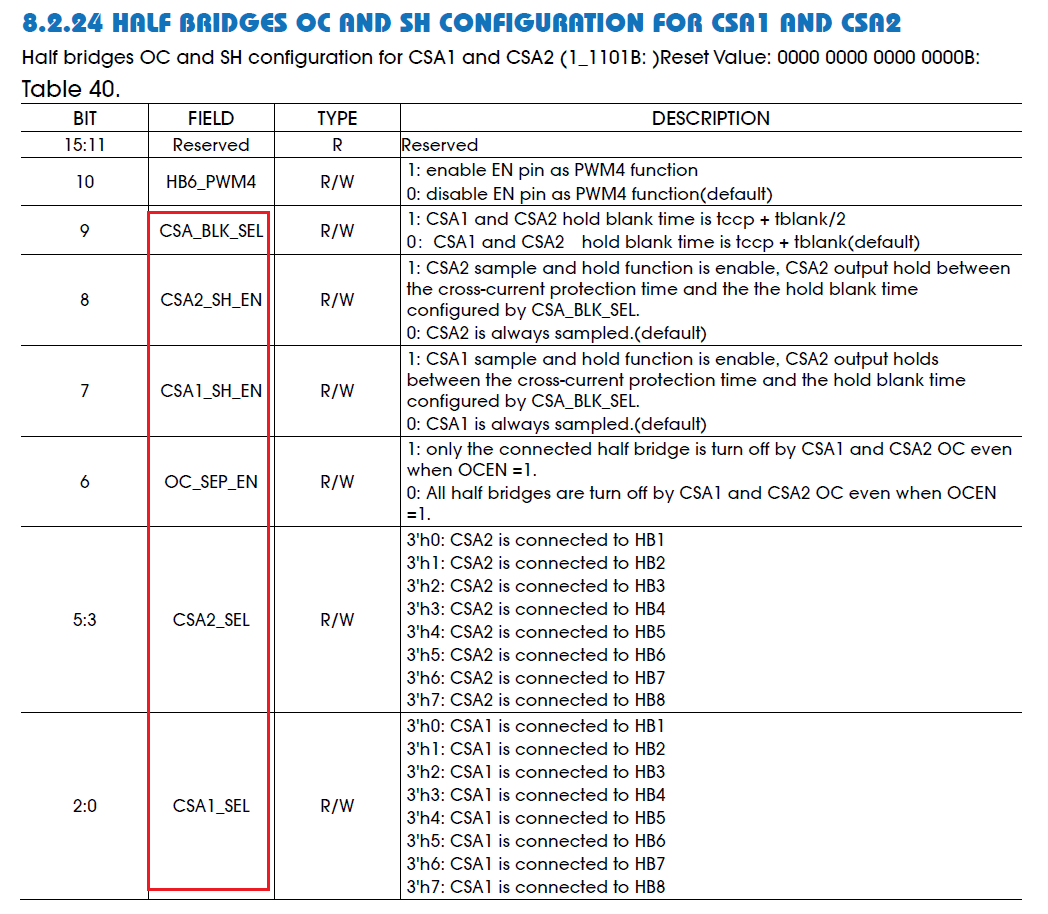
也可以直接关闭内部CSA,CSA的过流保护值和过流保护滤波时间都可以单独设置。
相关寄存器:
DR7808_GENCTRL1
DR7808_HBIDIAG
DR7808_GENCTRL2
DR7808_CSA_OC_SH
寄存器相关描述:
相关头文件如下:
/*
Analogysemi xutong
2023/10/10
*/
#ifndef __DR7808_H
#define __DR7808_H
#include "bsp_lpspi.h"
/*
DR7808 SPI每个帧是24bit数据组成
*/
#define DR7808_GENCTRL1 0x00
#define DR7808_GENCTRL2 0x01
#define DR7808_VDS1 0x02
#define DR7808_VDS2 0x03
#define DR7808_CCP_BLK1 0x04
#define DR7808_CCP_BLK2_ACT 0x05 //需要配置reg bank =0
#define DR7808_CCP_BLK2_FW 0x05 //需要配置reg bank =1
#define DR7808_HBMODE 0x06
#define DR7808_PWMSET 0x07
#define DR7808_TPRECHG 0x08
#define DR7808_HBIDIAG 0x09
#define DR7808_ST_ICHG 0x0A //需要配置reg bank =0
#define DR7808_PWM_PCHG_INIT 0x0A //需要配置reg bank =1
#define DR7808_PWM_ICHG_ACT 0x0B //需要配置reg bank =0
#define DR7808_PWM_ICHG_FW 0x0B //需要配置reg bank =1
#define DR7808_PWM_IDCHG_ACT 0x0C //需要配置reg bank =0
#define DR7808_PWM_PDCHG_INIT 0x0C //需要配置reg bank =1
#define DR7808_PWM_ICHGMAX_CCP_BLK3_ACT 0x0D //需要配置reg bank =0
#define DR7808_PWM_ICHGMAX_CCP_BLK3_FW 0x0D //需要配置reg bank =1
#define DR7808_TDON_OFF1 0x0E
#define DR7808_TDON_OFF2 0x0F
#define DR7808_TDON_OFF3 0x10
#define DR7808_GENSTAT 0x11
#define DR7808_DSOV 0x12
#define DR7808_HBVOUT_PWMERR 0x13
#define DR7808_EFF_TDON_OFF1 0x14
#define DR7808_EFF_TDON_OFF2 0x15
#define DR7808_EFF_TDON_OFF3 0x16
#define DR7808_TRISE_FALL1 0x17
#define DR7808_TRISE_FALL2 0x18
#define DR7808_TRISE_FALL3 0x19
#define DR7808_DEVID 0x1F
#define DR7808_DRV_LPWR_EN 0x1C
#define DR7808_CSA_OC_SH 0x1D
#define DR7808_MISC 0x1E
#define DR7808_GENSTAT 0x11
#define DR7808_DSOV 0x12
#define DR7808_HBVOUT_PWMERR 0x13
#define DR7808_EFF_TDON_OFF1 0x14
#define DR7808_EFF_TDON_OFF2 0x15
#define DR7808_EFF_TDON_OFF3 0x16
#define DR7808_TRISE_FALL 0x17
#define DR7808_TRISE_FALL2 0x18
#define DR7808_TRISE_FALL3 0x19
#define DR7808_GDF 0x1A
#define DR7808_DEVID 0x1F
//注意 DR7808 不同寄存器有不同Bank
//Note DR7808 has different banks for different registers
// DR7808 half bridge config
// DR7808 半桥配置
enum DR7808_HB_Mode{HighImpedance=0,LSn_ON=1,HSn_ON=2};
typedef struct{
uint8_t HB8_Mode;
uint8_t HB7_Mode;
uint8_t HB6_Mode;
uint8_t HB5_Mode;
uint8_t HB4_Mode;
uint8_t HB3_Mode;
uint8_t HB2_Mode;
uint8_t HB1_Mode;
}HBMODE_InitTypeDef;
// DR7808 PWM Setting
// DR7808 PWM 设置
enum DR7808_PWM_HB{HB1=0,HB2=1,HB3=2,HB4=3,HB5=4,HB6=5,HB7=6,HB8=7};
typedef struct{
uint8_t PWM1_HB;
uint8_t PWM2_HB;
uint8_t PWM3_HB;
uint8_t PWM1_EN;
uint8_t PWM2_EN;
uint8_t PWM3_EN;
//Drain-Source monitoring in bridge passive mode
//漏源监控在桥被动模式
uint8_t PASS_VDS;
//Settings for bridge driver passive mode
//00B: LS1-4 are always off.
//Note: Changing PASS_MOD from
//00B: to any other value requires to clear DSOV1) first before writing PASS_MOD,
//01B: LS1-4 are always on (static brake).
//10B: LS1-4 are activated if passive VM OV is detected (overvoltage brake) (default).
//11B: LS1-4 are activated if passive VM OV is detected and PWM1 = High (overvoltage brake conditioned by PWM1).
uint8_t PASS_Mode;
}PWMSET_InitTypeDef;
// half bridge Vds threshold Setting
// 半桥Vds阈值设定
/*
000B: 0.15V
001B: 0.20V (default)
010B: 0.25V
011B: 0.30V
100B: 0.40V
101B: 0.50V
110B: 0.60V
111B: 2.0V
*/
enum DR7808_HB_VDSTh{Vdsth_15=0,Vdsth_20=1,Vdsth_25=2,Vdsth_30=3,
Vdsth_40=4,Vdsth_50=5,Vdsth_60=6,Vdsth2_0=7};
typedef struct{
uint8_t HB8_VDSTh;
uint8_t HB7_VDSTh;
uint8_t HB6_VDSTh;
uint8_t HB5_VDSTh;
uint8_t HB4_VDSTh;
uint8_t HB3_VDSTh;
uint8_t HB2_VDSTh;
uint8_t HB1_VDSTh;
}VDS_Vth_InitTypeDef;
// 静态电流配置
// 详情看 静态充电和放电电流表格
enum DR7808_ST_ICHG_Current{GateDriverCurrent1=0,GateDriverCurrent2=1,ICHGST1=0,ICHGST2=1,ICHGST3=2,ICHGST4=3,
ICHGST5=4,ICHGST6=5,ICHGST7=6,ICHGST8=7,ICHGST9=8,ICHGST10=9,ICHGST11=10
,ICHGST12=11,ICHGST13=12,ICHGST14=13,ICHGST15=14,ICHGST16=15,ICHGST_Default=4};
typedef struct{
//配置是GateDriverCurrent1 还是GateDriverCurrent2
uint8_t HB8_ICHG;
uint8_t HB7_ICHG;
uint8_t HB6_ICHG;
uint8_t HB5_ICHG;
uint8_t HB4_ICHG;
uint8_t HB3_ICHG;
uint8_t HB2_ICHG;
uint8_t HB1_ICHG;
//配置Gate Driver Current 2电流大小 一共16个挡位,参考Static charge and discharge currents table
uint8_t ICHGST_2;
//配置Gate Driver Current 1电流大小 一共16个挡位,参考Static charge and discharge currents table
uint8_t ICHGST_1;
}ST_ICHG_InitTypeDef;
// CSA 相关配置
enum DR7808_CSA_Config{
// CSA1_Gain and CSA2_Gain
Gain10=0,Gain20=1,Gain40=2,Gain80=3,
// CSA1_Direction and CSA2_Direction
CSA_Unidirectional=0,CSA_Bidirectional=1,
// OCTH1 and OCTH2
OCThLevel1=0,OCThLevel2=1,
OCThLevel3=2,OCThLevel4=3,
// CSA1_SEL and CSA2_SEL
Con2HB1=0,Con2HB2=1,Con2HB3=2,Con2HB4=3,
Con2HB5=4,Con2HB6=5,Con2HB7=6,Con2HB8=7};
typedef struct{
//配置CSA方向 CSA_Bidirectional 或者 CSA_Unidirectional
//配置双向或者单向
uint8_t CSA1_Direction;
uint8_t CSA2_Direction;
// 配置 CSA Gain的大小 10,20,40,80
uint8_t CSA1_Gain;
uint8_t CSA2_Gain;
// 配置OCP是否开启
uint8_t OverCurrentProtect;
//配置CSA 在高边或者底边
//Configure CSA on the high-side or the low-side
uint8_t CSA1_Level;
uint8_t CSA2_Level;
//配置过流滤波时间
//Overcurrent filter time
uint8_t OC1FILT;
uint8_t OC2FILT;
//关闭CSA
//DisEnable CSA 设置为1
//Enable CSA 设置为0
uint8_t CSA1_OFF;
uint8_t CSA2_OFF;
// Overcurrent detection threshold
// 过流检测阈值设置
uint8_t OCTH1;
uint8_t OCTH2;
// Overcurrent detection threshold of SO1 with CSD1 = 0
//00B: VSO1 > VDD / 2 (default)
//01B: VSO1 > VDD / 2 + VDD / 10
//10B: VSO1 > VDD / 2 + 2 x VDD / 10
//11B: VSO1 > VDD / 2 + 3x VDD / 10
//Overcurrent detection threshold of SO1 with CSD1 = 1
//00B: VSO1 > VDD / 2+2 x VDD / 20 or VCSOx < VDD / 2 – 2 × VDD / 20 (default)
//01B: VSO1 > VDD / 2+ 4x VDD / 20 or VCSOx < VDD / 2 – 4 × VDD / 20
//10B: VSO1 > VDD / 2+ 5 x VDD / 20 or VCSOx < VDD / 2 ? 5 × VDD / 20
//11B: VSO1 > VDD / 2+ 6x VDD / 20 or VCSOx < VDD / 2 – 6 × VDD / 20
uint8_t CSA_BLK_SEL;
//1: CSA1 and CSA2 hold blank time is tccp + tblank/2
//0:CSA1 and CSA2 hold blank time is tccp + tblank(default)
// blank time 用于PWM 抑制功能时间设置
uint8_t CSA2_SH_EN;
uint8_t CSA1_SH_EN;
//选择是否使用PWM 抑制功能
//Select whether to use PWM suppression
uint8_t OC_SEP_EN;
// 选择 OCEN情况下只有CSA连接的半桥turn off 还是所有半桥Turn off
uint8_t CSA2_SEL;
uint8_t CSA1_SEL;
// CSA SEL根据CSA连接的半桥选择
}CSA_InitTypeDef;
// 获取寄存器信息
void DR7808_Read_Reg(uint8_t Reg,uint8_t *RData);
// 读取并且清除寄存器
void DR7808_Read_Clear_Reg(uint8_t Reg,uint8_t *RData);
// 写入寄存器信息
void DR7808_Write_Reg(uint8_t Reg,uint16_t WData,uint8_t *RData);
// 退出FS Mode
void DR7808_Quit_FS(void);
// 禁用看门狗
void DR7808_Dis_WD(void);
// DR7808 延时
void DR7808_delay(uint32_t count);
// 桥壁设置
void DR7808_Half_Bridge_Mode(HBMODE_InitTypeDef* config,uint8_t *RData);
// PWM设置通道和DS监控被动模式配置
void DR7808_PWMSET_Channel(PWMSET_InitTypeDef* config,uint8_t *RData);
// HB VDS 监控阈值设定
// HB VDS monitoring threshold Setting
// 设置 VDS1 和 VDS2 寄存器
void DR7808_VDS_Monitoring_1_4(VDS_Vth_InitTypeDef* config,uint8_t *RData);
void DR7808_VDS_Monitoring_5_8(VDS_Vth_InitTypeDef* config,uint8_t *RData);
// 内部CSA配置
void DR7808_CSA_Conifg(CSA_InitTypeDef* config,uint8_t *RData);
// 静态充放电电流设置
void DR7808_ST_ICHG_Conifg(ST_ICHG_InitTypeDef* config,uint8_t *RData);
// DR7808 喂狗
void DR7808_Feed_Dog(uint8_t *RData);
// 获取DR7808 ID
uint8_t DR7808_GetChipID(void);
// 获取所有寄存器的值
void Get_All_Reg(uint8_t* RData);
#endif
#include "DR7808.h" void DR7808_delay(uint32_t count) { volatile uint32_t i = 0; for (i = 0; i < count; ++i) { __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ } } //获取寄存器信息 void DR7808_Read_Reg(uint8_t Reg,uint8_t *RData) { uint8_t TxData[3]={0X00,0X00,0X00}; //读取寄存器 TxData[0]=(Reg<<1)|0xC0; Lpspi_Read(3,TxData,RData); } //读取与清除寄存器信息 void DR7808_Read_Clear_Reg(uint8_t Reg,uint8_t *RData) { uint8_t TxData[3]={0X00,0X00,0X00}; //读取寄存器 TxData[0]=(Reg<<1)|0xC1; Lpspi_Read(3,TxData,RData); } //写寄存器信息 void DR7808_Write_Reg(uint8_t Reg,uint16_t WData,uint8_t *RData) { uint8_t TxData[3]={0X00,0X00,0X00}; //读取寄存器&写入寄存器 TxData[0]=(Reg<<1)|0xC1; TxData[1]=WData>>8; TxData[2]=WData&0x00FF; Lpspi_Read(3,TxData,RData); } // dr7808 退出FS Mode void DR7808_Quit_FS(void) { uint8_t Data[3]={0X00,0X00,0X00}; //读取并且清除Gensata DR7808_Read_Clear_Reg(DR7808_GENSTAT,Data); DR7808_delay(2000); //看门狗位置1 DR7808_Write_Reg(DR7808_GENCTRL1,0x0027,Data); DR7808_delay(2000); //看门狗位置0 DR7808_Write_Reg(DR7808_GENCTRL1,0x0000,Data); DR7808_delay(2000); } // dr7808 禁用看门狗 void DR7808_Dis_WD(void) { uint8_t Data[3]; DR7808_delay(2000); //看门狗Unlock 置1 DR7808_Write_Reg(DR7808_GENCTRL1,0x00A7,Data); DR7808_delay(2000); //禁用看门狗 DR7808_Write_Reg(DR7808_GENCTRL2,0x4380,Data); } // dr7808桥壁配置 void DR7808_Half_Bridge_Mode(HBMODE_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; WData|=(config->HB8_Mode)<<14; WData|=(config->HB7_Mode)<<12; WData|=(config->HB6_Mode)<<10; WData|=(config->HB5_Mode)<<8; WData|=(config->HB4_Mode)<<6; WData|=(config->HB3_Mode)<<4; WData|=(config->HB2_Mode)<<2; WData|=(config->HB1_Mode); DR7808_Write_Reg(DR7808_HBMODE,WData,RData); } // 未测试 // dr7808 PWM 通道配置 void DR7808_PWMSET_Channel(PWMSET_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; WData|=(config->PWM1_HB)<<1; WData|=(config->PWM2_HB)<<5; WData|=(config->PWM3_HB)<<9; WData|=(config->PWM1_EN); WData|=(config->PWM2_EN)<<4; WData|=(config->PWM3_EN)<<8; WData|=(config->PASS_VDS)<<14; WData|=(config->PASS_Mode)<<12; DR7808_Write_Reg(DR7808_PWMSET,WData,RData); } //未测试 //VDS Monitor threshold setting HB1~HB4 void DR7808_VDS_Monitoring_1_4(VDS_Vth_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; WData|=(config->HB1_VDSTh); WData|=(config->HB2_VDSTh)<<3; WData|=(config->HB3_VDSTh)<<6; WData|=(config->HB4_VDSTh)<<9; DR7808_Write_Reg(DR7808_VDS1,WData,RData); } //未测试 //VDS Monitor threshold setting HB5~HB8 void DR7808_VDS_Monitoring_5_8(VDS_Vth_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; WData|=(config->HB5_VDSTh); WData|=(config->HB6_VDSTh)<<3; WData|=(config->HB7_VDSTh)<<6; WData|=(config->HB8_VDSTh)<<9; DR7808_Write_Reg(DR7808_VDS2,WData,RData); } // dr7808喂狗操作 void DR7808_Feed_Dog(uint8_t *RData) { uint16_t WData=0; uint8_t Data[3]; //读取看门狗位 DR7808_Read_Reg(DR7808_GENCTRL1,Data); DR7808_delay(20); //如果看门狗位为1 if((Data[2]&0x01)==1) { //看门狗位置0并写入 Data[2]&=0XFE; WData|=Data[1]<<8; WData|=Data[2]; DR7808_Write_Reg(DR7808_GENCTRL1,WData,RData); } else { //看门狗位置1并写入 Data[2]|=0X01; WData|=Data[1]<<8; WData|=Data[2]; DR7808_Write_Reg(DR7808_GENCTRL1,WData,RData); } } // dr7808 csa相关配置 void DR7808_CSA_Conifg(CSA_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; uint8_t Data[3]; //读取GENCTRL1配置 DR7808_Read_Reg(DR7808_GENCTRL1,Data); WData|=(config->CSA2_Direction)<<15; WData|=(config->CSA2_Gain)<<13; WData|=(config->CSA1_Direction)<<12; WData|=(config->CSA1_Gain)<<10; //接收值后十位不变 WData|=(Data[1]&0x03)<<8; WData|=Data[2]; DR7808_Write_Reg(DR7808_GENCTRL1,WData,RData); //清空WData WData=0; DR7808_delay(20); DR7808_Read_Reg(DR7808_HBIDIAG,Data); WData|=Data[2]; WData|=(config->CSA2_Level)<<15; WData|=(config->CSA1_Level)<<14; WData|=(config->OC2FILT)<<12; WData|=(config->OC1FILT)<<10; WData|=(config->CSA2_OFF)<<9; WData|=(config->CSA1_OFF)<<8; DR7808_Write_Reg(DR7808_HBIDIAG,WData,RData); //清空WData WData=0; DR7808_delay(20); //读取GENCTRL2配置 DR7808_Read_Reg(DR7808_GENCTRL2,Data); //清空后四位 Data[2]&=0XF0; //高8位不变 WData|=Data[1]<<8; WData|=Data[2]; WData|=(config->OCTH2)<<2; WData|=(config->OCTH1); DR7808_Write_Reg(DR7808_GENCTRL2,WData,RData); //清空WData WData=0; DR7808_delay(20); //读取GENCTRL2配置 DR7808_Read_Reg(DR7808_CSA_OC_SH,Data); WData=0; //最高位PWM不变 WData=(Data[1]&0X80)<<8; WData|=(config->CSA_BLK_SEL)<<9; WData|=(config->CSA2_SH_EN)<<8; WData|=(config->CSA1_SH_EN)<<7; WData|=(config->OC_SEP_EN)<<6; WData|=(config->CSA2_SEL)<<3; WData|=(config->CSA1_SEL); //写入过流数据 DR7808_Write_Reg(DR7808_CSA_OC_SH,WData,RData); } // 需要配置Reg Bank // 静态充放电电流设置 void DR7808_ST_ICHG_Conifg(ST_ICHG_InitTypeDef* config,uint8_t *RData) { uint16_t WData=0; uint8_t Data[3]; // 读取DR7808_GENCTRL1配置 并将REG BANK 其配置为0 DR7808_Read_Reg(DR7808_GENCTRL1,Data); Data[1]=Data[1]&0xfd; WData=Data[1]<<8; WData|=Data[2]; //写入reg bank DR7808_Write_Reg(DR7808_GENCTRL1,WData,RData); DR7808_delay(20); WData=0; //设置是电流1还是电流2 WData|=(config->HB8_ICHG)<<15; WData|=(config->HB7_ICHG)<<14; WData|=(config->HB6_ICHG)<<13; WData|=(config->HB5_ICHG)<<12; WData|=(config->HB4_ICHG)<<11; WData|=(config->HB3_ICHG)<<10; WData|=(config->HB2_ICHG)<<9; WData|=(config->HB1_ICHG)<<8; //设置电流挡位2 WData|=(config->ICHGST_2)<<4; //设置电流挡位1 WData|=(config->ICHGST_1); //写入电流挡位 DR7808_Write_Reg(DR7808_ST_ICHG,WData,RData); } // dr7808 ID获取 uint8_t DR7808_GetChipID(void) { uint8_t Data[3]; DR7808_Read_Reg(DR7808_DEVID,Data); return Data[2]; } //读取所有寄存器 void Get_All_Reg(uint8_t* RData) { uint8_t i=0; for(i=0;i<0x1f;i++) { DR7808_Read_Reg(i,RData); RData++; DR7808_delay(330); } }
DR7808退出Fail Safe:
// dr7808 退出FS Mode 经过验证 void DR7808_Quit_FS(void) { uint8_t Data[3]={0X00,0X00,0X00}; //读取并且清除Gensata DR7808_Read_Clear_Reg(DR7808_GENSTAT,Data); DR7808_delay(2000); //看门狗位置1 DR7808_Write_Reg(DR7808_GENCTRL1,0x0027,Data); DR7808_delay(2000); //看门狗位置0 DR7808_Write_Reg(DR7808_GENCTRL1,0x0000,Data); DR7808_delay(2000); }
DR7808关闭看门狗:
// dr7808 禁用看门狗 经过验证 void DR7808_Dis_WD(void) { uint8_t Data[3]; DR7808_delay(2000); //看门狗Unlock 置1 DR7808_Write_Reg(DR7808_GENCTRL1,0x00A7,Data); DR7808_delay(2000); //禁用看门狗 DR7808_Write_Reg(DR7808_GENCTRL2,0x4380,Data); }
DR7808设置HBMode:
HBMODE_InitTypeDef HBinit; HBinit.HB8_Mode=HSn_ON; HBinit.HB7_Mode=HighImpedance; HBinit.HB6_Mode=HSn_ON; HBinit.HB5_Mode=HighImpedance; HBinit.HB4_Mode=LSn_ON; HBinit.HB3_Mode=HighImpedance; HBinit.HB2_Mode=LSn_ON; HBinit.HB1_Mode=HighImpedance; DR7808_Half_Bridge_Mode(&HBinit,RegData);
DR7808设置PWM SET:
// PWM 设置桥壁 PWMSET_InitTypeDef PWMinit; // PWM2 和 PWM3 同样的设置方法 PWMinit.PWM1_EN=1; PWMinit.PWM1_HB=HB6; DR7808_PWMSET_Channel(&PWMinit,RegData);
DR7808设置VDS 监控阈值:
//设置VDS监控阈值 // half bridge Vds threshold Setting // 半桥Vds阈值设定 /* 000B: 0.15V 001B: 0.20V (default) 010B: 0.25V 011B: 0.30V 100B: 0.40V 101B: 0.50V 110B: 0.60V 111B: 2.0V */ VDS_Vth_InitTypeDef VDS_ThInit; VDS_ThInit.HB1_VDSTh=Vdsth2_0; VDS_ThInit.HB2_VDSTh=Vdsth2_0; VDS_ThInit.HB3_VDSTh=Vdsth2_0; VDS_ThInit.HB4_VDSTh=Vdsth2_0; VDS_ThInit.HB5_VDSTh=Vdsth2_0; VDS_ThInit.HB6_VDSTh=Vdsth2_0; VDS_ThInit.HB7_VDSTh=Vdsth2_0; VDS_ThInit.HB8_VDSTh=Vdsth2_0; DR7808_VDS_Monitoring_1_4(&VDS_ThInit,RegData); DR7808_VDS_Monitoring_5_8(&VDS_ThInit,RegData);
DR7808读取所有寄存器:
Get_All_Reg(RData);
DR7808 CSA相关配置:
//关闭CSA CSA_InitTypeDef CSA_Init; // 关闭CSA1 和CSA2 CSA_Init.CSA1_OFF=1; CSA_Init.CSA2_OFF=1; DR7808_CSA_Conifg(&CSA_Init,RegData); /* // CSA 结构体 typedef struct{ //配置CSA方向 CSA_Bidirectional 或者 CSA_Unidirectional //配置双向或者单向 uint8_t CSA1_Direction; uint8_t CSA2_Direction; // 配置 CSA Gain的大小 10,20,40,80 uint8_t CSA1_Gain; uint8_t CSA2_Gain; // 配置OCP是否开启 uint8_t OverCurrentProtect; //配置CSA 在高边或者底边 //Configure CSA on the high-side or the low-side uint8_t CSA1_Level; uint8_t CSA2_Level; //配置过流滤波时间 //Overcurrent filter time uint8_t OC1FILT; uint8_t OC2FILT; //关闭CSA //DisEnable CSA 设置为1 //Enable CSA 设置为0 uint8_t CSA1_OFF; uint8_t CSA2_OFF; // Overcurrent detection threshold // 过流检测阈值设置 uint8_t OCTH1; uint8_t OCTH2; // Overcurrent detection threshold of SO1 with CSD1 = 0 //00B: VSO1 > VDD / 2 (default) //01B: VSO1 > VDD / 2 + VDD / 10 //10B: VSO1 > VDD / 2 + 2 x VDD / 10 //11B: VSO1 > VDD / 2 + 3x VDD / 10 //Overcurrent detection threshold of SO1 with CSD1 = 1 //00B: VSO1 > VDD / 2+2 x VDD / 20 or VCSOx < VDD / 2 – 2 × VDD / 20 (default) //01B: VSO1 > VDD / 2+ 4x VDD / 20 or VCSOx < VDD / 2 – 4 × VDD / 20 //10B: VSO1 > VDD / 2+ 5 x VDD / 20 or VCSOx < VDD / 2 ? 5 × VDD / 20 //11B: VSO1 > VDD / 2+ 6x VDD / 20 or VCSOx < VDD / 2 – 6 × VDD / 20 uint8_t CSA_BLK_SEL; //1: CSA1 and CSA2 hold blank time is tccp + tblank/2 //0:CSA1 and CSA2 hold blank time is tccp + tblank(default) // blank time 用于PWM 抑制功能时间设置 uint8_t CSA2_SH_EN; uint8_t CSA1_SH_EN; //选择是否使用PWM 抑制功能 //Select whether to use PWM suppression uint8_t OC_SEP_EN; // 选择 OCEN情况下只有CSA连接的半桥turn off 还是所有半桥Turn off uint8_t CSA2_SEL; uint8_t CSA1_SEL; // CSA SEL根据CSA连接的半桥选择 }CSA_InitTypeDef; */
BSP_LPSPI相关代码STM32:
/* analogysemi xutong 2023/10/19 */ #ifndef __BSP_LPSPI_H #define __BSP_LPSPI_H #include "stm32h7xx_hal.h" #define SPIx SPI1 #define SPIx_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE() #define SPIx_SCK_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MISO_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MOSI_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_CS_GPIO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() /* Definition for SPIx Pins */ #define SPIx_SCK_PIN GPIO_PIN_3 #define SPIx_SCK_GPIO_PORT GPIOB #define SPIx_SCK_AF GPIO_AF5_SPI1 #define SPIx_MISO_PIN GPIO_PIN_4 #define SPIx_MISO_GPIO_PORT GPIOB #define SPIx_MISO_AF GPIO_AF5_SPI1 #define SPIx_MOSI_PIN GPIO_PIN_5 #define SPIx_MOSI_GPIO_PORT GPIOB #define SPIx_MOSI_AF GPIO_AF5_SPI1 #define SPIx_CS_PIN GPIO_PIN_6 #define SPIx_CS_GPIO_PORT GPIOB void LPSPI_Init(void); void Lpspi_Write(uint8_t datasize,uint8_t *data); void Lpspi_Read(uint8_t datasize,uint8_t *data,uint8_t *Rxdata); #endif /* __BSP_LPSPI_H */
#include "bsp_lpspi.h" SPI_HandleTypeDef SpiHandle; void Spi_delay(uint32_t count) { volatile uint32_t i = 0; for (i = 0; i < count; ++i) { __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ __asm("NOP"); /* 调用nop空指令 */ } } void LPSPI_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* Enable SPI1 clock */ SPIx_CLK_ENABLE(); SPIx_SCK_GPIO_CLK_ENABLE(); SPIx_MISO_GPIO_CLK_ENABLE(); SPIx_MOSI_GPIO_CLK_ENABLE(); SPIx_CS_GPIO_CLK_ENABLE(); /* 初始化GPIO 配置*/ /*##-1- Configure peripheral GPIO ##########################################*/ /* SPI SCK GPIO pin configuration */ GPIO_InitStruct.Pin = SPIx_SCK_PIN; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_PULLDOWN; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; GPIO_InitStruct.Alternate = SPIx_SCK_AF; HAL_GPIO_Init(SPIx_SCK_GPIO_PORT, &GPIO_InitStruct); /* SPI MISO GPIO pin configuration */ GPIO_InitStruct.Pin = SPIx_MISO_PIN; GPIO_InitStruct.Alternate = SPIx_MISO_AF; HAL_GPIO_Init(SPIx_MISO_GPIO_PORT, &GPIO_InitStruct); /* SPI MOSI GPIO pin configuration */ GPIO_InitStruct.Pin = SPIx_MOSI_PIN; GPIO_InitStruct.Alternate = SPIx_MOSI_AF; HAL_GPIO_Init(SPIx_MOSI_GPIO_PORT, &GPIO_InitStruct); /* SPI CS GPIO pin configuration */ GPIO_InitStruct.Pin = SPIx_CS_PIN; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_PULLDOWN; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(SPIx_CS_GPIO_PORT, &GPIO_InitStruct); /* 初始化SPI 配置*/ /*##-2- Configure the SPI peripheral #######################################*/ /* Set the SPI parameters */ SpiHandle.Instance = SPIx; SpiHandle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; SpiHandle.Init.Direction = SPI_DIRECTION_2LINES; SpiHandle.Init.CLKPhase = SPI_PHASE_1EDGE; SpiHandle.Init.CLKPolarity = SPI_POLARITY_HIGH; SpiHandle.Init.DataSize = SPI_DATASIZE_8BIT; SpiHandle.Init.FirstBit = SPI_FIRSTBIT_MSB; SpiHandle.Init.TIMode = SPI_TIMODE_DISABLE; SpiHandle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; SpiHandle.Init.CRCPolynomial = 7; SpiHandle.Init.NSS = SPI_NSS_SOFT; SpiHandle.Init.Mode = SPI_MODE_MASTER; //初始化SPI HAL_SPI_Init(&SpiHandle); //默认拉高CS引脚 HAL_GPIO_WritePin(SPIx_CS_GPIO_PORT,SPIx_CS_PIN,GPIO_PIN_SET); } void Lpspi_Write(uint8_t datasize,uint8_t *data) { //写数据 HAL_GPIO_WritePin(SPIx_CS_GPIO_PORT,SPIx_CS_PIN,GPIO_PIN_RESET); HAL_SPI_Transmit(&SpiHandle,data, datasize, 5000); Spi_delay(30); HAL_GPIO_WritePin(SPIx_CS_GPIO_PORT,SPIx_CS_PIN,GPIO_PIN_SET); } void Lpspi_Read(uint8_t datasize,uint8_t *data,uint8_t *Rxdata) { // 读写数据 HAL_GPIO_WritePin(SPIx_CS_GPIO_PORT,SPIx_CS_PIN,GPIO_PIN_RESET); HAL_SPI_TransmitReceive(&SpiHandle,data,Rxdata, datasize, 5000); Spi_delay(30); HAL_GPIO_WritePin(SPIx_CS_GPIO_PORT,SPIx_CS_PIN,GPIO_PIN_SET); }
需要注意的是,在故障安全模式下,控制寄存器被冻结为其默认值,WDTRIG、PASS_VDS、PASS_MOD、CSA1L、CSA2L除外。在此模式下,任何写命令(WDTRIG 位除外)或清除命令(GENSTAT除外)都将被丢弃并设置SPIE位(全局状态字节)。
在故障安全模式下对GENSTAT的清除命令不会重置该状态寄存器报告的任何故障标志。在退出序列开始之前,可以在此模式下读取控制和状态寄存器,而不会设置SPIE位。通常Fail Safe和 关闭看门狗可以一起使用
注意:以上有些代码未经过验证

