

基于Kubernetes和OpenKruise的可变基础设施实践
本文首发在OPPO互联网公众号,欢迎点击转载 https://mp.weixin.qq.com/s/hRvZz_bZfchmP0tkF6M2OA
对于可变基础设施的思考
kubernetes中的可变与不可变基础设施
在云原生逐渐盛行的现在,不可变基础设施的理念已经逐渐深入人心。不可变基础设施最早是由Chad Fowler于2013年提出的,其核心思想为任何基础设施的实例一旦创建之后变成为只读状态,如需要修改和升级,则使用新的实例进行替换。这一理念的指导下,实现了运行实例的一致,因此在提升发布效率、弹性伸缩、升级回滚方面体现出了无与伦比的优势。
kubernetes是不可变基础设施理念的一个极佳实践平台。Pod作为k8s的最小单元,承担了应用实例这一角色。通过ReplicaSet从而对Pod的副本数进行控制,从而实现Pod的弹性伸缩。而进行更新时,Deployment通过控制两个ReplicaSet的副本数此消彼长,从而进行实例的整体替换,实现升级和回滚操作。
我们进一步思考,我们是否需要将Pod作为一个完全不可变的基础设施实例呢?其实在kubernetes本身,已经提供了一个替换image的功能,来实现Pod不变的情况下,通过更换image字段,实现Container的替换。这样的优势在于无需重新创建Pod,即可实现升级,直接的优势在于免去了重新调度等的时间,使得容器可以快速启动。
从这个思路延伸开来,那么我们其实可以将Pod和Container分为两层来看。将Container作为不可变的基础设施,确保应用实例的完整替换;而将Pod看为可变的基础设施,可以进行动态的改变,亦即可变层。
关于升级变化的分析
对于应用的升级变化种类,我们来进行一下分类讨论,将其分为以下几类:
| 升级变化类型 | 说明 |
|---|---|
| 规格的变化 | cpu、内存等资源使用量的修改 |
| 配置的变化 | 环境变量、配置文件等的修改 |
| 镜像的变化 | 代码修改后镜像更新 |
| 健康检查的变化 | readinessProbe、livenessProbe配置的修改 |
| 其他变化 | 调度域、标签修改等其他修改 |
针对不同的变化类型,我们做过一次抽样调查统计,可以看到下图的一个统计结果。
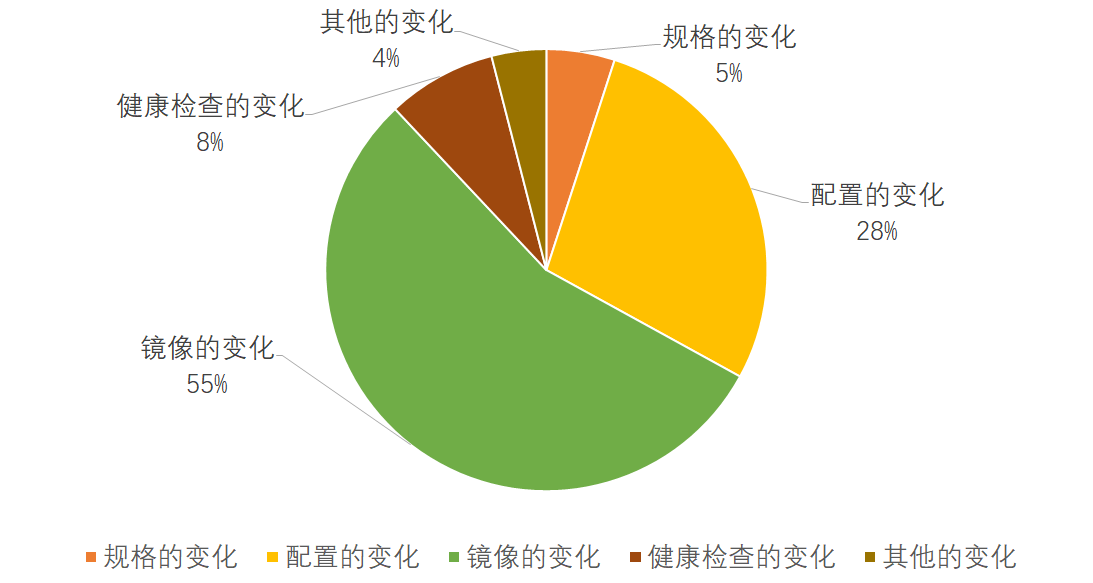
在一次升级变化中如果含有多个变化,则统计为多次。
可以看到支持镜像的替换可以覆盖一半左右的的升级变化,但是仍然有相当多的情况下导致不得不重新创建Pod。这点来说,不是特别友好。所以我们做了一个设计,将对于Pod的变化分为了三种Dynamic,Rebuild,Static三种。
| 修改类型 | 修改类型说明 | 修改举例 | 对应变化类型 |
|---|---|---|---|
| Dynamic 动态修改 | Pod不变,容器无需重建 | 修改了健康检查端口 | 健康检查的变化 |
| Rebuild 原地更新 | Pod不变,容器需要重新创建 | 更新了镜像、配置文件或者环境变量 | 镜像的变化,配置的变化 |
| Static 静态修改 | Pod需要重新创建 | 修改了容器规格 | 规格的变化 |
这样动态修改和原地更新的方式可以覆盖90%以上的升级变化。在Pod不变的情况下带来的收益也是显而易见的。
- 减少了调度、网络创建等的时间。
- 由于同一个应用的镜像大部分层都是复用的,大大缩短了镜像拉取的时间。
- 资源锁定,防止在集群资源紧缺时由于出让资源重新创建进入调度后,导致资源被其他业务抢占而无法运行。
- IP不变,对于很多有状态的服务十分友好。
Kubernetes与OpenKruise的定制
kubernetes的定制
那么如何来实现Dynamic和Rebuild更新呢?这里需要对kubernetes进行一下定制。
动态修改定制
liveness和readiness的动态修改支持相对来说较为简单,主要修改点在与prober_manager中增加了UpdatePod函数,用以判断当liveness或者readiness的配置改变时,停止原先的worker,重新启动新的worker。而后将UpdatePod嵌入到kubelet的HandlePodUpdates的流程中即可。
func (m *manager) UpdatePod(pod *v1.Pod) {
m.workerLock.Lock()
defer m.workerLock.Unlock()
key := probeKey{podUID: pod.UID}
for _, c := range pod.Spec.Containers {
key.containerName = c.Name
{
key.probeType = readiness
worker, ok := m.workers[key]
if ok {
if c.ReadinessProbe == nil {
//readiness置空了,原worker停止
worker.stop()
} else if !reflect.DeepEqual(*worker.spec, *c.ReadinessProbe) {
//readiness配置改变了,原worker停止
worker.stop()
}
}
if c.ReadinessProbe != nil {
if !ok || (ok && !reflect.DeepEqual(*worker.spec, *c.ReadinessProbe)) {
//readiness配置改变了,启动新的worker
w := newWorker(m, readiness, pod, c)
m.workers[key] = w
go w.run()
}
}
}
{
//liveness与readiness相似
......
}
}
}
原地更新定制
kubernetes原生支持了image的修改,对于env和volume的修改是未做支持的。因此我们对env和volume也支持了修改功能,以便其可以进行环境变量和配置文件的替换。这里利用了一个小技巧,就是我们在增加了一个ExcludedHash,用于计算Container内,包含env,volume在内的各项配置。
func HashContainerExcluded(container *v1.Container) uint64 {
copyContainer := container.DeepCopy()
copyContainer.Resources = v1.ResourceRequirements{}
copyContainer.LivenessProbe = &v1.Probe{}
copyContainer.ReadinessProbe = &v1.Probe{}
hash := fnv.New32a()
hashutil.DeepHashObject(hash, copyContainer)
return uint64(hash.Sum32())
}
这样当env,volume或者image发生变化时,就可以直接感知到。在SyncPod时,用于在计算computePodActions时,发现容器的相关配置发生了变化,则将该容器进行Rebuild。
func (m *kubeGenericRuntimeManager) computePodActions(pod *v1.Pod, podStatus *kubecontainer.PodStatus) podActions {
......
for idx, container := range pod.Spec.Containers {
......
if expectedHash, actualHash, changed := containerExcludedChanged(&container, containerStatus); changed {
// 当env,volume或者image更换时,则重建该容器。
reason = fmt.Sprintf("Container spec exclude resources hash changed (%d vs %d).", actualHash, expectedHash)
restart = true
}
......
message := reason
if restart {
//将该容器加入到重建的列表中
message = fmt.Sprintf("%s. Container will be killed and recreated.", message)
changes.ContainersToStart = append(changes.ContainersToStart, idx)
}
......
return changes
}
Pod的生命周期
在Pod从调度完成到创建Running中,会有一个ContaienrCreating的状态用以标识容器在创建中。而原生中当image替换时,先前的一个容器销毁,后一个容器创建过程中,Pod状态会一直处于Running,容易有错误流量导入,用户也无法识别此时容器的状态。
因此我们为原地更新,在ContainerStatus里增加了ContaienrRebuilding的状态,同时在容器创建成功前Pod的Ready Condition置为False,以便表达容器整在重建中,应用在此期间不可用。利用此标识,可以在此期间方便识别Pod状态、隔断流量。
OpenKruise的定制
OpenKruise(https://openkruise.io/)是阿里开源的一个项目,提供了一套在Kubernetes核心控制器之外的扩展 workload 管理和实现。其中Advanced StatefulSet,基于原生 StatefulSet 之上的增强版本,默认行为与原生完全一致,在此之外提供了原地升级、并行发布(最大不可用)、发布暂停等功能。
Advanced StatefulSet中的原地升级即与本文中的Redbuild一致,但是原生只支持替换镜像。因此我们在OpenKruise的基础上进行了定制,使其不仅可以支持image的原地更新,也可以支持当env、volume的原地更新以及livenessProbe、readinessProbe的动态更新。这个主要在shouldDoInPlaceUpdate函数中进行一下判断即可。这里就不再做代码展示了。
还在生产运行中还发现了一个基础库的小bug,我们也顺带向社区做了提交修复。https://github.com/openkruise/kruise/pull/154。
另外,还有个小坑,就是在pod里为了标识不同的版本,加入了controller-revision-hash值。
[root@xxx ~]# kubectl get pod -n predictor -o yaml predictor-0
apiVersion: v1
kind: Pod
metadata:
labels:
controller-revision-hash: predictor-85f9455f6
...
一般来说,该值应该只使用hash值作为value就可以了,但是OpenKruise中采用了{sts-name}+{hash}的方式,这带来的一个小问题就是sts-name就要因为label value的长度受到限制了。
写在最后
定制后的OpenKruise和kubernetes已经大规模在各个集群上上线,广泛应用在多个业务的后端运行服务中。经统计,通过原地更新覆盖了87%左右的升级部署需求,基本达到预期。
特别鸣谢阿里贡献的开源项目OpenKruise。
|
作者:xuxinkun 出处:xinkun的博客 链接:https://www.cnblogs.com/xuxinkun/ 本文版权归作者所有,欢迎转载。 未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 欢迎扫描右侧二维码关注微信公众号xinkun的博客进行订阅。也可以通过微信公众号留言同作者进行交流。 |

|

