
LevelDB库简介
转载自http://www.cnblogs.com/chenny7/p/4026447.html
LevelDB是Google开源的持久化KV单机数据库,具有很高的随机写,顺序读/写性能,但是随机读的性能很一般,也就是说,LevelDB很适合应用在查询较少,而写很多的场景。LevelDB应用了LSM (Log Structured Merge) 策略,lsm_tree对索引变更进行延迟及批量处理,并通过一种类似于归并排序的方式高效地将更新迁移到磁盘,降低索引插入开销,关于LSM,本文在后面也会简单提及。
根据Leveldb官方网站的描述,LevelDB的特点和限制如下:
特点:
1、key和value都是任意长度的字节数组;
2、entry(即一条K-V记录)默认是按照key的字典顺序存储的,当然开发者也可以重载这个排序函数;
3、提供的基本操作接口:Put()、Delete()、Get()、Batch();
4、支持批量操作以原子操作进行;
5、可以创建数据全景的snapshot(快照),并允许在快照中查找数据;
6、可以通过前向(或后向)迭代器遍历数据(迭代器会隐含的创建一个snapshot);
7、自动使用Snappy压缩数据;
8、可移植性;
限制:
1、非关系型数据模型(NoSQL),不支持sql语句,也不支持索引;
2、一次只允许一个进程访问一个特定的数据库;
3、没有内置的C/S架构,但开发者可以使用LevelDB库自己封装一个server;
LevelDB本身只是一个lib库,在源码目录make编译即可,然后在我们的应用程序里面可以直接include leveldb/include/db.h头文件,该头文件有几个基本的数据库操作接口,下面是一个测试例子:
#include <iostream> #include <string> #include <assert.h> #include "leveldb/db.h" using namespace std; int main(void) { leveldb::DB *db; leveldb::Options options; options.create_if_missing = true; // open leveldb::Status status = leveldb::DB::Open(options,"/tmp/testdb", &db); assert(status.ok()); string key = "name"; string value = "chenqi"; // write status = db->Put(leveldb::WriteOptions(), key, value); assert(status.ok()); // read status = db->Get(leveldb::ReadOptions(), key, &value); assert(status.ok()); cout<<value<<endl; // delete status = db->Delete(leveldb::WriteOptions(), key); assert(status.ok()); status = db->Get(leveldb::ReadOptions(),key, &value); if(!status.ok()) { cerr<<key<<" "<<status.ToString()<<endl; } else { cout<<key<<"==="<<value<<endl; } // close delete db; return 0; }
上面的例子演示了如何插入、获取、删除一条记录,编译代码:
g++ -o test test.cpp libleveldb.a -lpthread -Iinclude
执行./test后,会在/tmp下面生成一个目录testdb,里面包含若干文件:

然后简要说下各个文件的含义:
1、CURRENT
2、LOG
3、LOCK
4、MANIFEST
下图是LevelDB运行一段时间后的存储模型快照:内存中的MemTable和Immutable MemTable以及磁盘上的几种主要文件:Current文件,Manifest文件,log文件以及SSTable文件。当然,LevelDb除了这六个主要部分还有一些辅助的文件,但是以上六个文件和数据结构是LevelDb的主体构成元素。
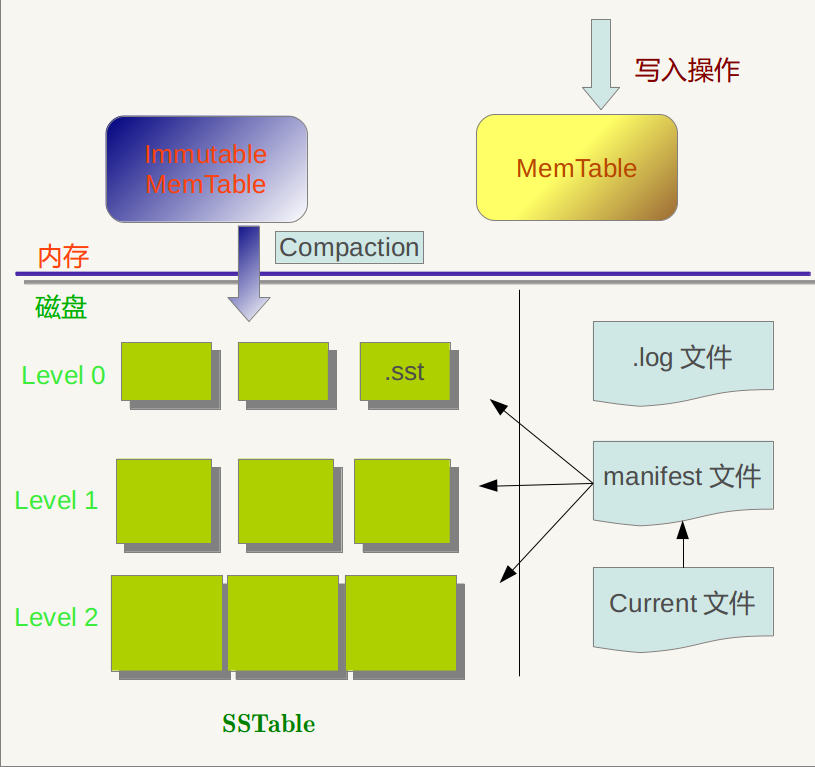
log文件、MemTable、SSTable文件都是用来存储k-v记录的,下面再说说manifest和Current文件的作用。
SSTable中的某个文件属于特定层级,而且其存储的记录是key有序的,那么必然有文件中的最小key和最大key,这是非常重要的信息,Manifest 就记载了SSTable各个文件的管理信息,比如属于哪个Level,文件名称叫啥,最小key和最大key各自是多少。下图是Manifest所存储内容的示意:
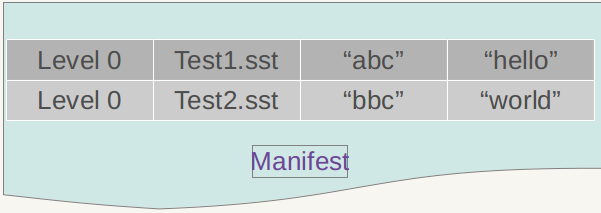
另外,在LevleDb的运行过程中,随着Compaction的进行,SSTable文件会发生变化,会有新的文件产生,老的文件被废弃,Manifest也会跟着反映这种变化,此时往往会新生成Manifest文件来记载这种变化,而Current则用来指出哪个Manifest文件才是我们关心的那个Manifest文件。
二、读写数据
写操作流程:
1、顺序写入磁盘log文件;
2、写入内存memtable(采用skiplist结构实现);
3、写入磁盘SST文件(sorted string table files),这步是数据归档的过程(永久化存储);
注意:
- log文件的作用是是用于系统崩溃恢复而不丢失数据,假如没有Log文件,因为写入的记录刚开始是保存在内存中的,此时如果系统崩溃,内存中的数据还没有来得及Dump到磁盘,所以会丢失数据;
- 在写memtable时,如果其达到check point(满员)的话,会将其改成immutable memtable(只读),然后等待dump到磁盘SST文件中,此时也会生成新的memtable供写入新数据;
- memtable和sst文件中的key都是有序的,log文件的key是无序的;
- LevelDB删除操作也是插入,只是标记Key为删除状态,真正的删除要到Compaction的时候才去做真正的操作;
- LevelDB没有更新接口,如果需要更新某个Key的值,只需要插入一条新纪录即可;或者先删除旧记录,再插入也可;
读操作流程:
1、在内存中依次查找memtable、immutable memtable;
2、如果配置了cache,查找cache;
3、根据mainfest索引文件,在磁盘中查找SST文件;

举个例子:我们先往levelDb里面插入一条数据 {key="www.samecity.com" value="我们"},过了几天,samecity网站改名为:69同城,此时我们插入数据{key="www.samecity.com" value="69同城"},同样的key,不同的value;逻辑上理解好像levelDb中只有一个存储记录,即第二个记录,但是在levelDb中很可能存在两条记录,即上面的两个记录都在levelDb中存储了,此时如果用户查询key="www.samecity.com",我们当然希望找到最新的更新记录,也就是第二个记录返回,因此,查找的顺序应该依照数据更新的新鲜度来,对于SSTable文件来说,如果同时在level L和Level L+1找到同一个key,level L的信息一定比level L+1的要新。
三、SSTable文件
SST文件并不是平坦的结构,而是分层组织的,这也是LevelDB名称的来源。
SST文件的一些实现细节:
1、每个SST文件大小上限为2MB,所以,LevelDB通常存储了大量的SST文件;
2、SST文件由若干个4K大小的blocks组成,block也是读/写操作的最小单元;
3、SST文件的最后一个block是一个index,指向每个data block的起始位置,以及每个block第一个entry的key值(block内的key有序存储);
4、使用Bloom filter加速查找,只要扫描index,就可以快速找出所有可能包含指定entry的block。
5、同一个block内的key可以共享前缀(只存储一次),这样每个key只要存储自己唯一的后缀就行了。如果block中只有部分key需要共享前缀,在这部分key与其它key之间插入"reset"标识。
由log直接读取的entry会写到Level 0的SST中(最多4个文件);
当Level 0的4个文件都存储满了,会选择其中一个文件Compact到Level 1的SST中;
注意:Level 0的SSTable文件和其它Level的文件相比有特殊性:这个层级内的.sst文件,两个文件可能存在key重叠,比如有两个level 0的sst文件,文件A和文件B,文件A的key范围是:{bar, car},文件B的Key范围是{blue,samecity},那么很可能两个文件都存在key=”blood”的记录。对于其它Level的SSTable文件来说,则不会出现同一层级内.sst文件的key重叠现象,就是说Level L中任意两个.sst文件,那么可以保证它们的key值是不会重叠的。
Log:最大4MB (可配置), 会写入Level 0;
Level 0:最多4个SST文件,;
Level 1:总大小不超过10MB;
Level 2:总大小不超过100MB;
Level 3+:总大小不超过上一个Level ×10的大小。
比如:0 ↠ 4 SST, 1 ↠ 10M, 2 ↠ 100M, 3 ↠ 1G, 4 ↠ 10G, 5 ↠ 100G, 6 ↠ 1T, 7 ↠ 10T
在读操作中,要查找一条entry,先查找log,如果没有找到,然后在Level 0中查找,如果还是没有找到,再依次往更底层的Level顺序查找;如果查找了一条不存在的entry,则要遍历一遍所有的Level才能返回"Not Found"的结果。
在写操作中,新数据总是先插入开头的几个Level中,开头的这几个Level存储量也比较小,因此,对某条entry的修改或删除操作带来的性能影响就比较可控。
可见,SST采取分层结构是为了最大限度减小插入新entry时的开销;
Compaction操作
对于LevelDb来说,写入记录操作很简单,删除记录仅仅写入一个删除标记就算完事,但是读取记录比较复杂,需要在内存以及各个层级文件中依照新鲜程度依次查找,代价很高。为了加快读取速度,levelDb采取了compaction的方式来对已有的记录进行整理压缩,通过这种方式,来删除掉一些不再有效的KV数据,减小数据规模,减少文件数量等。
LevelDb的compaction机制和过程与Bigtable所讲述的是基本一致的,Bigtable中讲到三种类型的compaction: minor ,major和full:
- minor Compaction,就是把memtable中的数据导出到SSTable文件中;
- major compaction就是合并不同层级的SSTable文件;
- full compaction就是将所有SSTable进行合并;
LevelDb包含其中两种,minor和major。
Minor compaction 的目的是当内存中的memtable大小到了一定值时,将内容保存到磁盘文件中,如下图:

immutable memtable其实是一个SkipList,其中的记录是根据key有序排列的,遍历key并依次写入一个level 0 的新建SSTable文件中,写完后建立文件的index 数据,这样就完成了一次minor compaction。从图中也可以看出,对于被删除的记录,在minor compaction过程中并不真正删除这个记录,原因也很简单,这里只知道要删掉key记录,但是这个KV数据在哪里?那需要复杂的查找,所以在minor compaction的时候并不做删除,只是将这个key作为一个记录写入文件中,至于真正的删除操作,在以后更高层级的compaction中会去做。
当某个level下的SSTable文件数目超过一定设置值后,levelDb会从这个level的SSTable中选择一个文件(level>0),将其和高一层级的level+1的SSTable文件合并,这就是major compaction。
我们知道在大于0的层级中,每个SSTable文件内的Key都是由小到大有序存储的,而且不同文件之间的key范围(文件内最小key和最大key之间)不会有任何重叠。Level 0的SSTable文件有些特殊,尽管每个文件也是根据Key由小到大排列,但是因为level 0的文件是通过minor compaction直接生成的,所以任意两个level 0下的两个sstable文件可能再key范围上有重叠。所以在做major compaction的时候,对于大于level 0的层级,选择其中一个文件就行,但是对于level 0来说,指定某个文件后,本level中很可能有其他SSTable文件的key范围和这个文件有重叠,这种情况下,要找出所有有重叠的文件和level 1的文件进行合并,即level 0在进行文件选择的时候,可能会有多个文件参与major compaction。
LevelDb在选定某个level进行compaction后,还要选择是具体哪个文件要进行compaction,比如这次是文件A进行compaction,那么下次就是在key range上紧挨着文件A的文件B进行compaction,这样每个文件都会有机会轮流和高层的level 文件进行合并。
如果选好了level L的文件A和level L+1层的文件进行合并,那么问题又来了,应该选择level L+1哪些文件进行合并?levelDb选择L+1层中和文件A在key range上有重叠的所有文件来和文件A进行合并。也就是说,选定了level L的文件A,之后在level L+1中找到了所有需要合并的文件B,C,D…..等等。剩下的问题就是具体是如何进行major 合并的?就是说给定了一系列文件,每个文件内部是key有序的,如何对这些文件进行合并,使得新生成的文件仍然Key有序,同时抛掉哪些不再有价值的KV 数据。

Major compaction的过程如下:对多个文件采用多路归并排序的方式,依次找出其中最小的Key记录,也就是对多个文件中的所有记录重新进行排序。之后采取一定的标准判断这个Key是否还需要保存,如果判断没有保存价值,那么直接抛掉,如果觉得还需要继续保存,那么就将其写入level L+1层中新生成的一个SSTable文件中。就这样对KV数据一一处理,形成了一系列新的L+1层数据文件,之前的L层文件和L+1层参与compaction 的文件数据此时已经没有意义了,所以全部删除。这样就完成了L层和L+1层文件记录的合并过程。
那么在major compaction过程中,判断一个KV记录是否抛弃的标准是什么呢?其中一个标准是:对于某个key来说,如果在小于L层中存在这个Key,那么这个KV在major compaction过程中可以抛掉。因为我们前面分析过,对于层级低于L的文件中如果存在同一Key的记录,那么说明对于Key来说,有更新鲜的Value存在,那么过去的Value就等于没有意义了,所以可以删除。
四、Cache
前面讲过对于levelDb来说,读取操作如果没有在内存的memtable中找到记录,要多次进行磁盘访问操作。假设最优情况,即第一次就在level 0中最新的文件中找到了这个key,那么也需要读取2次磁盘,一次是将SSTable的文件中的index部分读入内存,这样根据这个index可以确定key是在哪个block中存储;第二次是读入这个block的内容,然后在内存中查找key对应的value。
LevelDb中引入了两个不同的Cache:Table Cache和Block Cache。其中Block Cache是配置可选的,即在配置文件中指定是否打开这个功能。
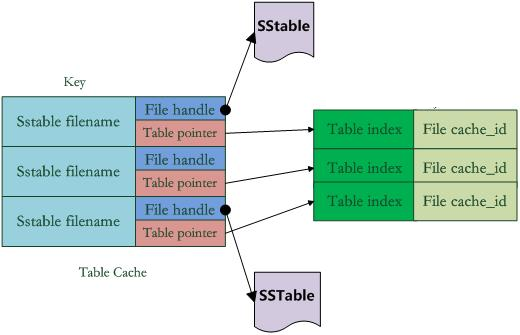
如上图,在Table Cache中,key值是SSTable的文件名称,Value部分包含两部分,一个是指向磁盘打开的SSTable文件的文件指针,这是为了方便读取内容;另外一个是指向内存中这个SSTable文件对应的Table结构指针,table结构在内存中,保存了SSTable的index内容以及用来指示block cache用的cache_id ,当然除此外还有其它一些内容。
比如在get(key)读取操作中,如果levelDb确定了key在某个level下某个文件A的key range范围内,那么需要判断是不是文件A真的包含这个KV。此时,levelDb会首先查找Table Cache,看这个文件是否在缓存里,如果找到了,那么根据index部分就可以查找是哪个block包含这个key。如果没有在缓存中找到文件,那么打开SSTable文件,将其index部分读入内存,然后插入Cache里面,去index里面定位哪个block包含这个Key 。如果确定了文件哪个block包含这个key,那么需要读入block内容,这是第二次读取。
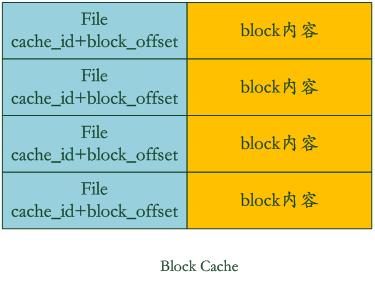
Block Cache是为了加快这个过程的,其中的key是文件的cache_id加上这个block在文件中的起始位置block_offset。而value则是这个Block的内容。
如果levelDb发现这个block在block cache中,那么可以避免读取数据,直接在cache里的block内容里面查找key的value就行,如果没找到呢?那么读入block内容并把它插入block cache中。levelDb就是这样通过两个cache来加快读取速度的。从这里可以看出,如果读取的数据局部性比较好,也就是说要读的数据大部分在cache里面都能读到,那么读取效率应该还是很高的,而如果是对key进行顺序读取效率也应该不错,因为一次读入后可以多次被复用。但是如果是随机读取,您可以推断下其效率如何。
五、版本控制
在Leveldb中,Version就代表了一个版本,它包括当前磁盘及内存中的所有文件信息。在所有的version中,只有一个是CURRENT(当前版本),其它都是历史版本。
当执行一次compaction 或者 创建一个Iterator后,Leveldb将在当前版本基础上创建一个新版本,当前版本就变成了历史版本。
VersionSet 是所有Version的集合,管理着所有存活的Version。
VersionEdit 表示Version之间的变化,相当于delta 增量,表示有增加了多少文件,删除了文件:
Version0 + VersionEdit --> Version1
Version0->Version1->Version2->Version3
VersionEdit会保存到MANIFEST文件中,当做数据恢复时就会从MANIFEST文件中读出来重建数据。
Leveldb的这种版本的控制,让我想到了双buffer切换,双buffer切换来自于图形学中,用于解决屏幕绘制时的闪屏问题,在服务器编程中也有用处。
比如我们的服务器上有一个字典库,每天我们需要更新这个字典库,我们可以新开一个buffer,将新的字典库加载到这个新buffer中,等到加载完毕,将字典的指针指向新的字典库。
Leveldb的version管理和双buffer切换类似,但是如果原version被某个iterator引用,那么这个version会一直保持,直到没有被任何一个iterator引用,此时就可以删除这个version。
六、改进
HyperLevelDB是在LevelDB的基础上做的一个分支,它主要在下面两点提升了LevelDB的性能:
- 改进了写线程的并发性;
- 改进的压缩过程,提高了吞吐量;
参考文档:
http://dailyjs.com/2013/04/19/leveldb-and-node-1/
http://blog.csdn.net/qq112928/article/details/21275999
http://www.cnblogs.com/haippy/archive/2011/12/04/2276064.html

