一、最大熵原理 最大熵原理是在1957 年由E.T.Jaynes 提出的,其主要思想是,在只掌握关于未知分布的部分知识时,应该选取符合这些知识但熵值最大的概率分布。因为在这种情况下,符合已知知识的概率分布 可能不止一个。我们知道,熵定义的实际上是一个随机变量 的不确定性,熵最大的时候,说明随机变量最不确定,换句话说,也就是随机变量最随机,对其行为做准确预测最困难。从这个意义上讲,那么最大熵原理的实质就是,在已知部分知识的前提下,关于未知分布最合理的推断就是符合已知知识最不确定或最随机的推断,这是我们可以作出的唯一不偏不倚的选择,任何其它的选择都意味着我们增加了其它的约束和假设,这些约束和假设根据我们掌握的信息无法作出。
最大熵原理指出,当我们需要对一个随机事件的概率分布 进行预测时,我们的预测应当满足全部已知的条件,而对未知的情况不要做任何主观假设。(不做主观假设这点很重要。)在这种情况下,概率分布 最均匀,预测的风险最小。因为这时概率分布的信息熵 最大,所以人们称这种模型叫“最大熵模型 ”。匈牙利著名数学家、信息论最高奖香农奖得主希萨(Csiszar)证明,对任何一组不自相矛盾的信息,这个最大熵模型 不仅存在,而且是唯一的。而且它们都有同一个非常简单的形式 --指数函数 。
二、最大熵模型 参考文献 http://www.cnblogs.com/ooon/p/5677098.html
在求解概率模型时,当没有任何约束条件则只需找到熵最大的模型,比如预测一个骰子的点数,每个面为 1 6 1 6 X X { A , B , C } { A , B , C }
P ( A ) = P ( B ) = P ( C ) = 1 3 P ( A ) = P ( B ) = P ( C ) = 1 3
当给定一个约束 P ( A ) = 1 2 P ( A ) = 1 2
P ( A ) = 1 2 P ( A ) = 1 2
P ( B ) = P ( C ) = 1 4 P ( B ) = P ( C ) = 1 4
如果用欧式空间中的 simplex 来表示随机变量 X X X X p p p p P ( A ) P ( A ) p p
P ( A ) = 1 , P ( B ) = P ( C ) = 0 P ( A ) = 1 , P ( B ) = P ( C ) = 0
P ( A ) = P ( B ) = P ( C ) = 1 3 P ( A ) = P ( B ) = P ( C ) = 1 3
分别用下图表示以上两种情况:
明白了 simplex 的定义之后,将其与概率模型联系起来,在 simplex 中,不加任何约束,整个概率空间的取值可以是 simplex 中的任意一点,只需找到满足最大熵条件的的即可;当引入一个约束条件 C 1 C 1 C 1 C 1 C 1 C 1 C 2 C 2 C 1 C 1 C 2 C 2
接下来以统计建模的形式来描述 MaxEnt 模型,给定训练数据 { ( x i , y i ) } N i = 1 { ( x i , y i ) } i = 1 N X = x X = x P ( Y | X = x ) P ( Y | X = x ) Y Y ( X , Y ) ( X , Y ) ( X , Y ) ( X , Y ) 特征函数 来引入的,首先先回忆一下函数期望 的概念
对于随机变量 X = x i , i = 1 , 2 , … X = x i , i = 1 , 2 , …
随机变量期望 : 对于随机变量 X X E ( X ) = ∑ i x i p i E ( X ) = ∑ i x i p i
随机变量函数期望 :若 Y = f ( X ) Y = f ( X ) X X Y Y E ( Y ) = ∑ i f ( x i ) p i E ( Y ) = ∑ i f ( x i ) p i
特征函数
特征函数 f ( x , y ) f ( x , y ) x x y y
f ( x , y ) = { 1 , 当 x 、 y 满 足 某 一 事 实 . 0 , 不 满 足 该 事 实 . f ( x , y ) = { 1 , 当 x 、 y 满 足 某 一 事 实 . 0 , 不 满 足 该 事 实 .
特征函数 f ( x , y ) f ( x , y ) x x y y
数据集中,第一列为 Y ,右边为 X ,可以为该数据集写出一些特征函数,数据集中得特征函数形式如下:
f ( x , y ) = { 1 , 当 x = C l o u d y a n d y = O u t d o o r . 0 , e l s e . f ( x , y ) = { 1 , 当 x = C l o u d y a n d y = O u t d o o r . 0 , e l s e .
为每个 <feature,label> 对 都做一个如上的特征函数,用来描述数据集数学化。
约束条件
接下来看经验分布,现在把训练数据当做由随机变量 ( X , Y ) ( X , Y ) ˜ P ( X , Y ) P ~ ( X , Y ) ˜ P ( X ) P ~ ( X )
˜ P ( X = x , Y = y ) = c o u n t ( X = x , Y = y ) N ˜ P ( X = x ) = c o u n t ( X = x ) N P ~ ( X = x , Y = y ) = c o u n t ( X = x , Y = y ) N P ~ ( X = x ) = c o u n t ( X = x ) N
用 E ˜ P ( f ) E P ~ ( f ) f ( x , y ) f ( x , y ) ˜ P ( X , Y ) P ~ ( X , Y )
E ˜ P ( f ) = ∑ x , y ˜ P ( x , y ) f ( x , y ) = 1 N ∑ x , y f ( x , y ) E P ~ ( f ) = ∑ x , y P ~ ( x , y ) f ( x , y ) = 1 N ∑ x , y f ( x , y )
˜ P ( x , y ) P ~ ( x , y ) f ( x , y ) f ( x , y ) P ( Y | X ) P ( Y | X ) f f f f P ( Y | X ) P ( Y | X ) f f
E P ( f ) = ∑ x , y P ( x , y ) f ( x , y ) ≈ ∑ x , y ˜ P ( x ) P ( y | x ) f ( x , y ) E P ( f ) = ∑ x , y P ( x , y ) f ( x , y ) ≈ ∑ x , y P ~ ( x ) P ( y | x ) f ( x , y )
经验分布与特征函数结合便能代表概率模型需要满足的约束,只需使得两个期望项相等, 即 E P ( f ) = E ˜ P ( f ) E P ( f ) = E P ~ ( f )
∑ x , y ˜ P ( x ) p ( y | x ) f ( x , y ) = ∑ x , y ˜ P ( x , y ) f ( x , y ) ∑ x , y P ~ ( x ) p ( y | x ) f ( x , y ) = ∑ x , y P ~ ( x , y ) f ( x , y )
上式便为 MaxEnt 中需要满足的约束,给定 n n f i ( x , y ) f i ( x , y ) n n C C
C = { P | E P ( f i ) = E ˜ P ( f i ) , I = 1 , 2 , … , n } C = { P | E P ( f i ) = E P ~ ( f i ) , I = 1 , 2 , … , n }
从满足约束的模型集合 C C P ( Y | X ) P ( Y | X )
最大熵模型
关于条件分布 P ( Y | X ) P ( Y | X )
H ( P ) = – ∑ x , y P ( y , x ) l o g P ( y | x ) = – ∑ x , y ˜ P ( x ) P ( y | x ) l o g P ( y | x ) H ( P ) = – ∑ x , y P ( y , x ) l o g P ( y | x ) = – ∑ x , y P ~ ( x ) P ( y | x ) l o g P ( y | x )
首先满足约束条件然后使得该熵最大即可,MaxEnt 模型 P ∗ P ∗
P ∗ = a r g max P ∈ C H ( P ) 或 P ∗ = a r g min P ∈ C − H ( P ) P ∗ = a r g max P ∈ C H ( P ) 或 P ∗ = a r g min P ∈ C − H ( P )
综上给出形式化的最大熵模型:
给定数据集 { ( x i , y i ) } N i = 1 { ( x i , y i ) } i = 1 N f i ( x , y ) , i = 1 , 2 … , n f i ( x , y ) , i = 1 , 2 … , n C C
min P ∈ C ∑ x , y ˜ P ( x ) P ( y | x ) l o g P ( y | x ) s . t . E p ( f i ) = E ˜ P ( f i ) ∑ y P ( y | x ) = 1 min P ∈ C ∑ x , y P ~ ( x ) P ( y | x ) l o g P ( y | x ) s . t . E p ( f i ) = E P ~ ( f i ) ∑ y P ( y | x ) = 1
MaxEnt 模型的求解
MaxEnt 模型最后被形式化为带有约束条件的最优化问题,可以通过拉格朗日乘子法将其转为无约束优化的问题,引入拉格朗日乘子:
w 0 , w 1 , … , w n w 0 , w 1 , … , w n L ( P , w ) L ( P , w )
L ( P , w ) = − H ( P ) + w 0 ( 1 − ∑ y P ( y | x ) ) + n ∑ i = 1 w i ( E ˜ P ( f i ) − E p ( f i ) ) = ∑ x , y ˜ P ( x ) P ( y | x ) l o g P ( y | x ) + w 0 ( 1 − ∑ y P ( y | x ) ) + n ∑ i = 1 w i ( ∑ x , y ˜ P ( x , y ) f ( x , y ) − ∑ x , y ˜ P ( x ) p ( y | x ) f ( x , y ) ) L ( P , w ) = − H ( P ) + w 0 ( 1 − ∑ y P ( y | x ) ) + ∑ i = 1 n w i ( E P ~ ( f i ) − E p ( f i ) ) = ∑ x , y P ~ ( x ) P ( y | x ) l o g P ( y | x ) + w 0 ( 1 − ∑ y P ( y | x ) ) + ∑ i = 1 n w i ( ∑ x , y P ~ ( x , y ) f ( x , y ) − ∑ x , y P ~ ( x ) p ( y | x ) f ( x , y ) )
现在问题转化为: min P ∈ C L ( P , w ) min P ∈ C L ( P , w ) L ( P , w ) L ( P , w ) w i → + ∞ w i → + ∞ L ( P , w ) → + ∞ L ( P , w ) → + ∞ L ( P , w ) = max L ( P , w ) L ( P , w ) = max L ( P , w )
min P ∈ C max w L ( P , w ) min P ∈ C max w L ( P , w )
由于 L ( P , w ) L ( P , w ) L ( P , w ) L ( P , w )
min P ∈ C max w L ( P , w ) = max w min P ∈ C L ( P , w ) min P ∈ C max w L ( P , w ) = max w min P ∈ C L ( P , w )
现在可以先求内部的极小问题 min P ∈ C L ( P , w ) min P ∈ C L ( P , w ) min P ∈ C L ( P , w ) min P ∈ C L ( P , w ) w w Ψ ( w ) Ψ ( w )
Ψ ( w ) = min P ∈ C L ( P , w ) = L ( P w , w ) Ψ ( w ) = min P ∈ C L ( P , w ) = L ( P w , w )
上式的解 P w P w
P w = a r g min P ∈ C L ( P , w ) = P w ( y | x ) P w = a r g min P ∈ C L ( P , w ) = P w ( y | x )
由于求解 P P P w P w P ( y | x ) P ( y | x ) P w ( y | x ) P w ( y | x )
∂ L ( P , w ) ∂ P ( y | x ) = ∑ x , y ˜ P ( x ) ( l o g P ( y | x ) + 1 ) − ∑ y w 0 − ∑ x , y ( ˜ P ( x ) n ∑ i = 1 w i f i ( x , y ) ) = ∑ x , y ˜ P ( x ) ( l o g P ( y | x ) + 1 − w 0 − n ∑ i = 1 w i f i ( x , y ) ) = 0 ⇒ P ( y | x ) = e x p ( n ∑ i = 1 w i f i ( x , y ) + w 0 − 1 ) = e x p ( ∑ n i = 1 w i f i ( x , y ) ) e x p ( 1 − w 0 ) ∂ L ( P , w ) ∂ P ( y | x ) = ∑ x , y P ~ ( x ) ( l o g P ( y | x ) + 1 ) − ∑ y w 0 − ∑ x , y ( P ~ ( x ) ∑ i = 1 n w i f i ( x , y ) ) = ∑ x , y P ~ ( x ) ( l o g P ( y | x ) + 1 − w 0 − ∑ i = 1 n w i f i ( x , y ) ) = 0 ⇒ P ( y | x ) = e x p ( ∑ i = 1 n w i f i ( x , y ) + w 0 − 1 ) = e x p ( ∑ i = 1 n w i f i ( x , y ) ) e x p ( 1 − w 0 )
由于 ∑ y P ( y | x ) = 1 ∑ y P ( y | x ) = 1
∑ y P ( y | x ) = 1 ⇒ 1 e x p ( 1 − w 0 ) ∑ y e x p ( n ∑ i = 1 w i f i ( x , y ) ) = 1 ∑ y P ( y | x ) = 1 ⇒ 1 e x p ( 1 − w 0 ) ∑ y e x p ( ∑ i = 1 n w i f i ( x , y ) ) = 1
进而可以得到:
e x p ( 1 − w 0 ) = ∑ y e x p ( n ∑ i = 1 w i f i ( x , y ) ) e x p ( 1 − w 0 ) = ∑ y e x p ( ∑ i = 1 n w i f i ( x , y ) )
这里 e x p ( 1 − w 0 ) e x p ( 1 − w 0 ) Z w ( x ) Z w ( x ) e x p ( 1 − w 0 ) e x p ( 1 − w 0 ) MaxEnt 模型 :
P w ( y | x ) = 1 Z w ( x ) e x p ( n ∑ i = 1 w i f i ( x , y ) ) Z w ( x ) = ∑ y e x p ( n ∑ i = 1 w i f i ( x , y ) ) P w ( y | x ) = 1 Z w ( x ) e x p ( ∑ i = 1 n w i f i ( x , y ) ) Z w ( x ) = ∑ y e x p ( ∑ i = 1 n w i f i ( x , y ) )
这里 f i ( x , y ) f i ( x , y ) w i w i P w ( y | x ) P w ( y | x ) w w w ∗ w ∗
w ∗ = a r g max w Ψ ( w ) w ∗ = a r g max w Ψ ( w )
所以现在最大上模型转为求解 Ψ ( w ) Ψ ( w ) w ∗ w ∗ P w ( y | x ) P w ( y | x ) Ψ ( w ) Ψ ( w )
Ψ ( w ) = ∑ x , y ˜ P ( x ) P w ( y | x ) l o g P w ( y | x ) + n ∑ i = 1 w i ( ∑ x , y ˜ P ( x , y ) f ( x , y ) − ∑ x , y ˜ P ( x ) P w ( y | x ) f ( x , y ) ) = ∑ x , y ˜ P ( x , y ) n ∑ i = 1 w i f i ( x , y ) + ∑ x , y ˜ P ( x ) P w ( y | x ) ( l o g P w ( y | x ) − n ∑ i = 1 w i f i ( x , y ) ) = ∑ x , y ˜ P ( x , y ) n ∑ i = 1 w i f i ( x , y ) + ∑ x , y ˜ P ( x ) P w ( y | x ) l o g Z w ( x ) = ∑ x , y ˜ P ( x , y ) n ∑ i = 1 w i f i ( x , y ) + ∑ x ˜ P ( x ) l o g Z w ( x ) ∑ y P w ( y | x ) = ∑ x , y ˜ P ( x , y ) n ∑ i = 1 w i f i ( x , y ) + ∑ x ˜ P ( x ) l o g Z w ( x ) Ψ ( w ) = ∑ x , y P ~ ( x ) P w ( y | x ) l o g P w ( y | x ) + ∑ i = 1 n w i ( ∑ x , y P ~ ( x , y ) f ( x , y ) − ∑ x , y P ~ ( x ) P w ( y | x ) f ( x , y ) ) = ∑ x , y P ~ ( x , y ) ∑ i = 1 n w i f i ( x , y ) + ∑ x , y P ~ ( x ) P w ( y | x ) ( l o g P w ( y | x ) − ∑ i = 1 n w i f i ( x , y ) ) = ∑ x , y P ~ ( x , y ) ∑ i = 1 n w i f i ( x , y ) + ∑ x , y P ~ ( x ) P w ( y | x ) l o g Z w ( x ) = ∑ x , y P ~ ( x , y ) ∑ i = 1 n w i f i ( x , y ) + ∑ x P ~ ( x ) l o g Z w ( x ) ∑ y P w ( y | x ) = ∑ x , y P ~ ( x , y ) ∑ i = 1 n w i f i ( x , y ) + ∑ x P ~ ( x ) l o g Z w ( x )
以上推倒第二行到第三行用到以下结论:
P w ( y | x ) = 1 Z w ( x ) e x p ( n ∑ i = 1 w i f i ( x , y ) ) ⇒ l o g P w ( y | x ) = n ∑ i = 1 w i f i ( x , y ) − l o g Z w ( x ) P w ( y | x ) = 1 Z w ( x ) e x p ( ∑ i = 1 n w i f i ( x , y ) ) ⇒ l o g P w ( y | x ) = ∑ i = 1 n w i f i ( x , y ) − l o g Z w ( x )
倒数第二行到最后一行是由于:∑ y P w ( y | x ) = 1 ∑ y P w ( y | x ) = 1 极其复杂 的运算,得到了需要极大化的式子:
max p ∈ C ∑ x , y ˜ P ( x , y ) n ∑ i = 1 w i f i ( x , y ) + ∑ x ˜ P ( x ) l o g Z w ( x ) max p ∈ C ∑ x , y P ~ ( x , y ) ∑ i = 1 n w i f i ( x , y ) + ∑ x P ~ ( x ) l o g Z w ( x )
极大化似然估计解法
这太难了,有没有简单又 work 的方式呢? 答案是有的,就是极大似然估计 MLE 了,这里有训练数据得到经验分布 ˜ P ( x , y ) P ~ ( x , y ) P ( Y | X ) P ( Y | X )
L ˜ P ( P w ) = l o g ∏ x , y P ( y | x ) ˜ P ( x , y ) = ∑ x , y ˜ P ( x , y ) l o g P ( y | x ) L P ~ ( P w ) = l o g ∏ x , y P ( y | x ) P ~ ( x , y ) = ∑ x , y P ~ ( x , y ) l o g P ( y | x )
将 P w ( y | x ) P w ( y | x )
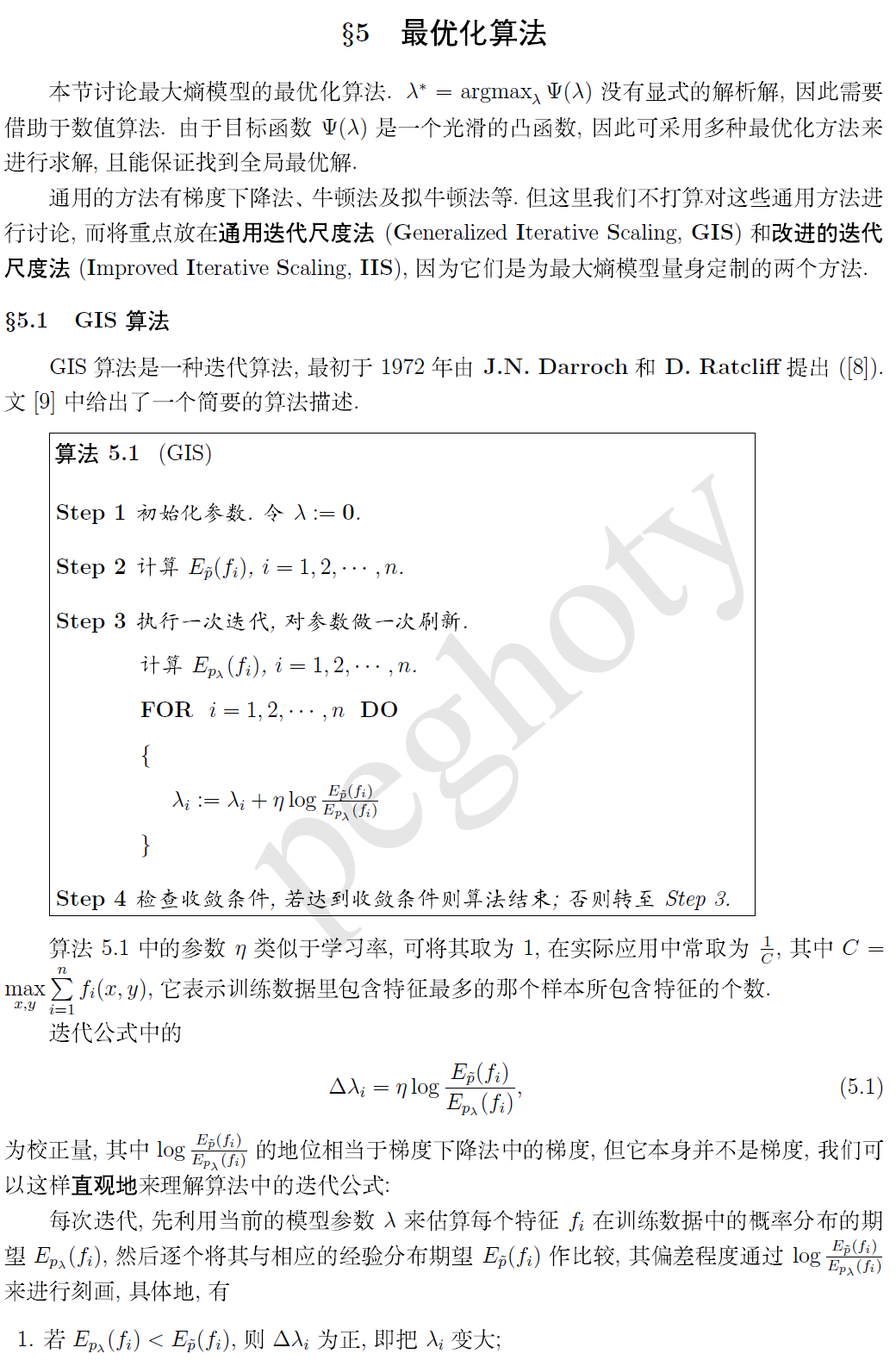
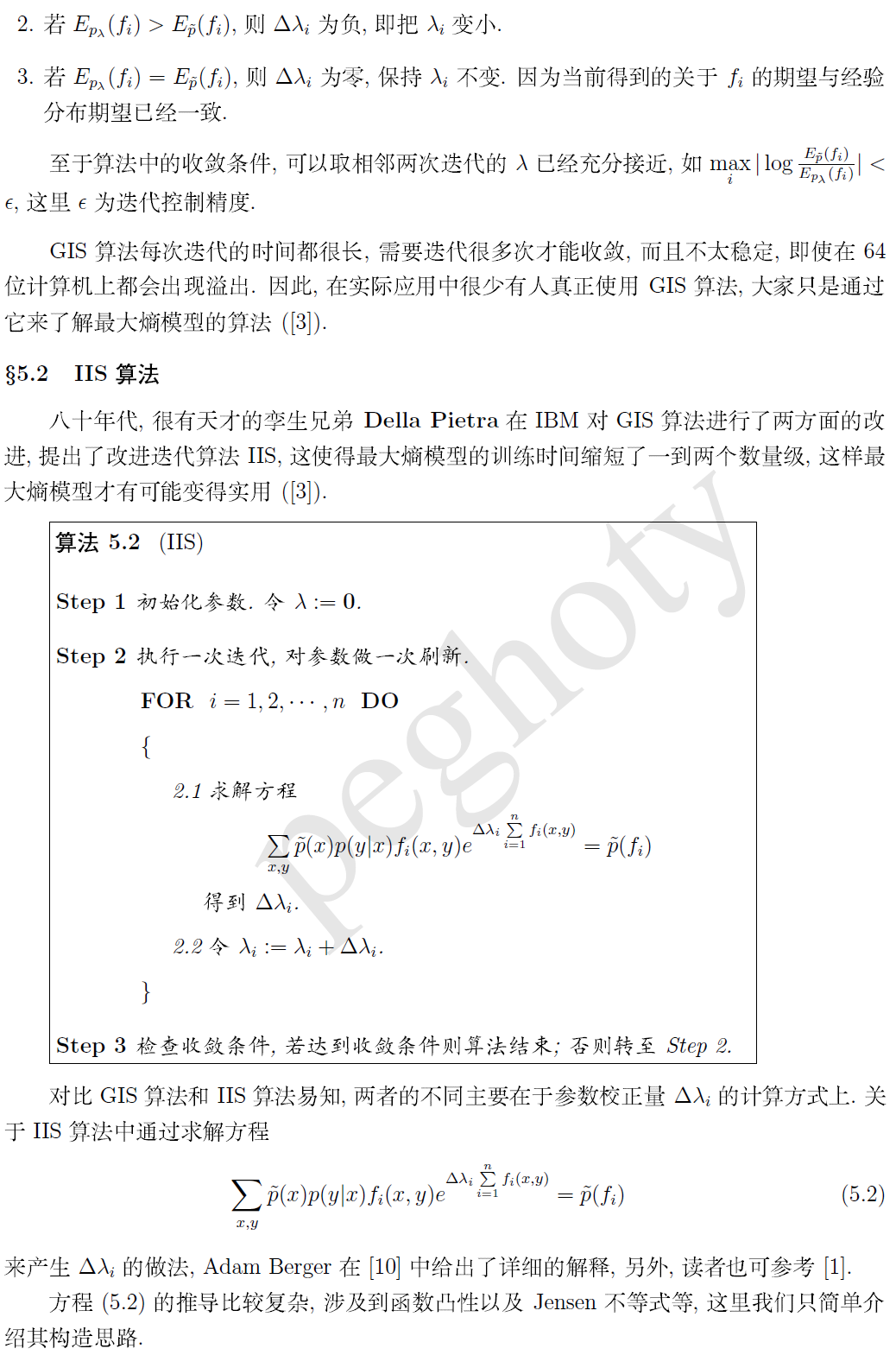
显而易见,拉格朗日对偶得到的结果与极大似然得到的结果时等价的,现在只需极大化似然函数即可,顺带优化目标中可以加入正则项,这是一个凸优化问题,一般的梯度法、牛顿法都可解之,专门的算法有GIS和IIS 算法。
三、GIS和IIS 算法 参考文献 http://blog.csdn.net/itplus/article/details/26550369









【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· 写一个简单的SQL生成工具
· AI 智能体引爆开源社区「GitHub 热点速览」
· C#/.NET/.NET Core技术前沿周刊 | 第 29 期(2025年3.1-3.9)