

ubuntu12.04+fuerte 下跑通lsd-slam——数据集
lsd-slam(下载链接:https://github.com/tum-vision/lsd_slam)提供了两种方法,一种是用数据集(下载地址http://vision.in.tum.de/lsdslam),一种是用usb摄像头,github也有相应的使用说明,不是很详细,下面介绍我的步骤.ps:也是一个slam新手,很多东西不懂,有错误的地方请大家指出
环境:ubuntu12.04+fuerte
目标:使用数据集,跑通lsd-slam
1.安装ubuntu12.04。我装的是双系统,不太建议用虚拟机,最开始使用虚拟机没有成功,后来换成了双系统
2.安装fuerte。按照http://wiki.ros.org/fuerte/Installation/Ubuntu这个教程来,接着是设置ROS环境,按照http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment这个步骤来,注意第4步,要选择rosbuild,此处
source ~/fuerte_workspace/setup.bash
如果这样设置,只对当前shell有效,导致每开一个新的shell都需要执行上述这条命令,可以添加环境变量
echo "source ~/fuerte_workspace/setup.bash" >> ~/.bashrc
source ~/.bashrc
这样一次修改,永久有效。
3.在shell中执行
roscore
结果:
roscore要一直运行
4.打开一个新的shell,执行
rosrun lsd_slam_viewer viewer
结果:

可以看到PointCloud Viewer中什么都没有显示
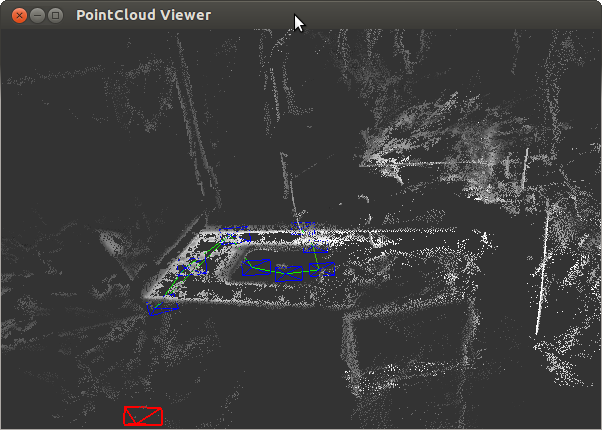
5.打开一个新的shell,执行
rosrun lsd_slam_core dataset_slam _files:=<files> _hz:=<hz> _calib:=<calibration_file>
<files>表示数据集中图片的存放路径,<hz>表示帧率,可以为0,<calibration_file>表示校正文件的路径,如我的
rosrun lsd_slam_core dataset_slam _files:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/images _hz:=0 _calib:=/home/xtl/fuerte_workspace/sandbox/LSD_room_images/LSD_room/cameraCalibration.cfg
结果
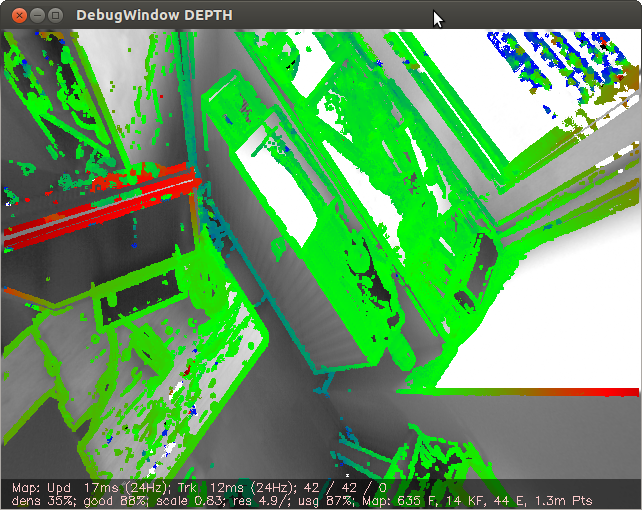
同时Point Cloud Viewer中显示出点云
下一篇将介绍如何使用usb摄像头跑lsd-slam。
原创文章,转载请注明出处

 浙公网安备 33010602011771号
浙公网安备 33010602011771号