第3章:有限马尔科夫决策过程
1.Agent-Environment接口
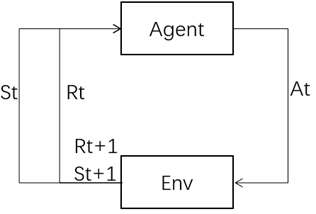
Agent是学习者和决策制定者,环境是由一切Agent之外的东西组成。下图是马尔科夫决策过程的agent和environment交互过程。
如果说一个状态包含关于过去agent-env交互的全部信息,并且这个交互会对未来造成一定的影响,那么称这个状态具有马尔科夫性质。
MDP的dynamics 概率等式p
2.目标和奖励
通常,我们agent的目标是使它接收到的累积奖励最大。这就意味着并不是去最大化眼前的奖励,还是最大化整个过程中的奖励。奖励也是区分强化学习的最显著地特点之一。
我们设置的奖励应该是使agent能够达到我们的目标,而不是能够学会以什么样的方式来达到我们的目标。比如说,我们在下象棋的时候,agent可能会想着去吃掉对方的棋子,哪怕付出的代价是输掉这场比赛。这就是如何正确设置奖励的重要性,它的设立应该是为实现我们的目标而服务的,而不是以什么样的方式去实现。
3.返回值和片段
在简单的场景下,返回值是所有奖励的总和。Gt= Rt+1 + Rt+2 + Rt+3 + Rt+4 +......+RT;
但是如果说在有些场景系,片段不是有有限的步骤,而是无限的。为了解决这种情况,就引入了折扣因数 γ,γ是个小于等于1的数。当γ小于1的时候,无限步数Gt就会有一个有限的值;当γ等于0的时候,就表示agent只关心眼前的奖励。但是,通常情况下,只关心眼前的奖励会减少获得未来奖励的可能性。当γ接近1的时候,agent把未来的奖励也考虑进去,这个时候就会很有远见。
4.策略和值函数
值函数(状态值函数或者是状态动作值函数):评估agent在给定的状态下的好坏;或者是在给定的状态下,执行给定的动作的好坏。
策略:根据特定的动作来决定值函数,就是策略。一个策略就是一个从状态到各个动作可能性的映射。
其中最重要的是贝尔曼方程,这个是整个强化学习值函数的基本性质。

上面就是Vπ的贝尔曼方程,他表示的是当前状态值和下一个状态值之间关系。
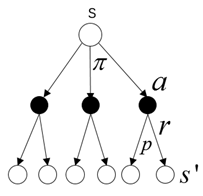
Backup diagram for vπ
通过Backup diagram 可以很清楚理解贝尔曼方程的原理。空心圆代表的是状态,实心圆代表的是状态-动作对。
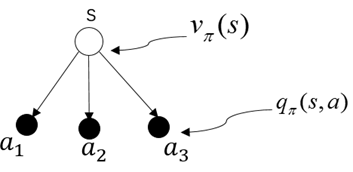

状态值函数vπ(s) 状态-动作值函数qπ(s,a)
这两个图表明了状态值函数和状态-动作值函数之间的关系
5.总结
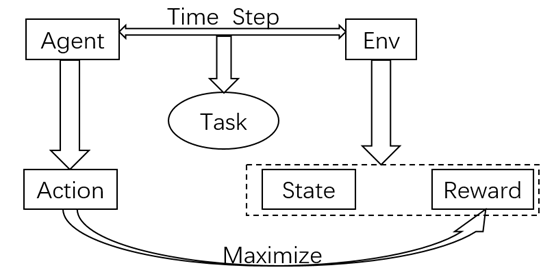
agent通过episode 中的每一步和环境进行交互,两者共同组合成一个任务task,agent 的action是以最大化整个阶段的reward总和为目的,其中state 和 reward 是归环境所有,和agent没有任何关系。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号