
UR6机器人关节D-H矩阵:
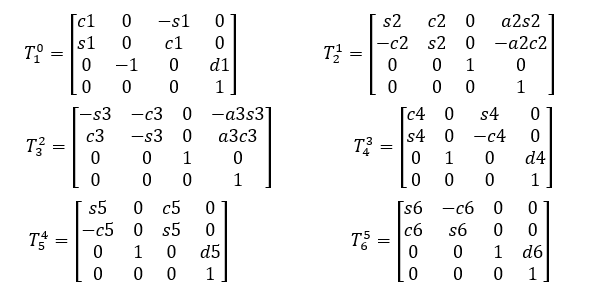
末端关节(未包含a6):
/// <summary> /// 关节末端的空间姿态-位置向量[px,py,pz] /// </summary> /// <param name="Ang">每个关节的角度值</param> /// <returns>[px,py,pz]</returns> public float[] R6P(float[] Ang) { float C1 = (float)Math.Cos(Ang[0]); float S1 = (float)Math.Sin(Ang[0]); float S2 = (float)Math.Sin(Ang[1]); float C2 = (float)Math.Cos(Ang[1]); float S23 = (float)Math.Sin(Ang[1] + Ang[2]); float C23 = (float)Math.Cos(Ang[1] + Ang[2]); float S234 = (float)Math.Sin(Ang[1] + Ang[2] + Ang[3]); float C234 = (float)Math.Cos(Ang[1] + Ang[2] + Ang[3]); float C5 = (float)Math.Cos(Ang[4]); float S5 = (float)Math.Sin(Ang[4]); float px = (C1 * C234 * C5 - S1 * S5) * d6 + C1 * S234 * d5 - S1 * d4 + C1 * C23 * a3 + C1 * a2 * S2; ; float py = (S1 * C234 * C5 + C1 * S5) * d6 + S1 * S234 * d5 + C1 * d4 + S1 * C23 * a3 + S1 * a2 * S2; ; float pz = -S234 * C5 * d6 + C234 * d5 - a3 * S23 + a2 * C2 + d1; ; return new float[] { px, py, pz }; } /// <summary> /// 关节末端的空间姿态-n向量[nx,ny,nz] /// </summary> /// <param name="Ang">每个关节的角度值</param> /// <returns>[nx,ny,nz]</returns> public float[] R6N(float[] Ang) { float C1 = (float)Math.Cos(Ang[0]); float S1 = (float)Math.Sin(Ang[0]); float S234 = (float)Math.Sin(Ang[1] + Ang[2] + Ang[3]); float C234 = (float)Math.Cos(Ang[1] + Ang[2] + Ang[3]); float C5 = (float)Math.Cos(Ang[4]); float S5 = (float)Math.Sin(Ang[4]); float C6 = (float)Math.Cos(Ang[5]); float S6 = (float)Math.Sin(Ang[5]); float nx = (C1 * C234 * S5 + S1 * C5) * S6 + C1 * S234 * C6; ; float ny = (S1 * C234 * S5 - C1 * C5) * S6 + S1 * S234 * C6; ; float nz = (-S234) * S5 * S6 + C234 * C6; ; return new float[] { nx, ny, nz }; } /// <summary> /// 关节末端的空间姿态-o向量[ox,oy,oz] /// </summary> /// <param name="Ang">每个关节的角度值</param> /// <returns>[ox,oy,oz]</returns> public float[] R6O(float[] Ang) { float C1 = (float)Math.Cos(Ang[0]); float S1 = (float)Math.Sin(Ang[0]); float S234 = (float)Math.Sin(Ang[1] + Ang[2] + Ang[3]); float C234 = (float)Math.Cos(Ang[1] + Ang[2] + Ang[3]); float C5 = (float)Math.Cos(Ang[4]); float S5 = (float)Math.Sin(Ang[4]); float C6 = (float)Math.Cos(Ang[5]); float S6 = (float)Math.Sin(Ang[5]); float ox = (C1 * C234 * S5 + S1 * C5) * (-C6) + C1 * S234 * S6; ; float oy = (S1 * C234 * S5 - C1 * C5) * (-C6) + S1 * S234 * (S6); ; float oz = S234 * S5 * C6 + C234 * S6; ; return new float[] { ox, oy, oz }; } /// <summary> /// 关节末端的空间姿态-a向量[ax,ay,az] /// </summary> /// <param name="Ang">每个关节的角度值</param> /// <returns>[ax,ay,az]</returns> public float[] R6A(float[] Ang) { float C1 = (float)Math.Cos(Ang[0]); float S1 = (float)Math.Sin(Ang[0]); float S234 = (float)Math.Sin(Ang[1] + Ang[2] + Ang[3]); float C234 = (float)Math.Cos(Ang[1] + Ang[2] + Ang[3]); float C5 = (float)Math.Cos(Ang[4]); float S5 = (float)Math.Sin(Ang[4]); float ax = C1 * C234 * C5 - S1 * S5; ; float ay = S1 * C234 * C5 + C1 * S5; ; float az = -S234 * C5; ; return new float[] { ax, ay, az }; }


 浙公网安备 33010602011771号
浙公网安备 33010602011771号