ROS的软件包安装和应用
一.ROS应用商店简介:
ROS应用商店一般用来存放ROS软件包,有多个应用商店,除了ROS官方应用商店外,之前添加的清华源也是一个应用商店,ROS软件包除了放在应用商店外,还有一些是以源代码形式存放在github上
二.ROS软件包查询:
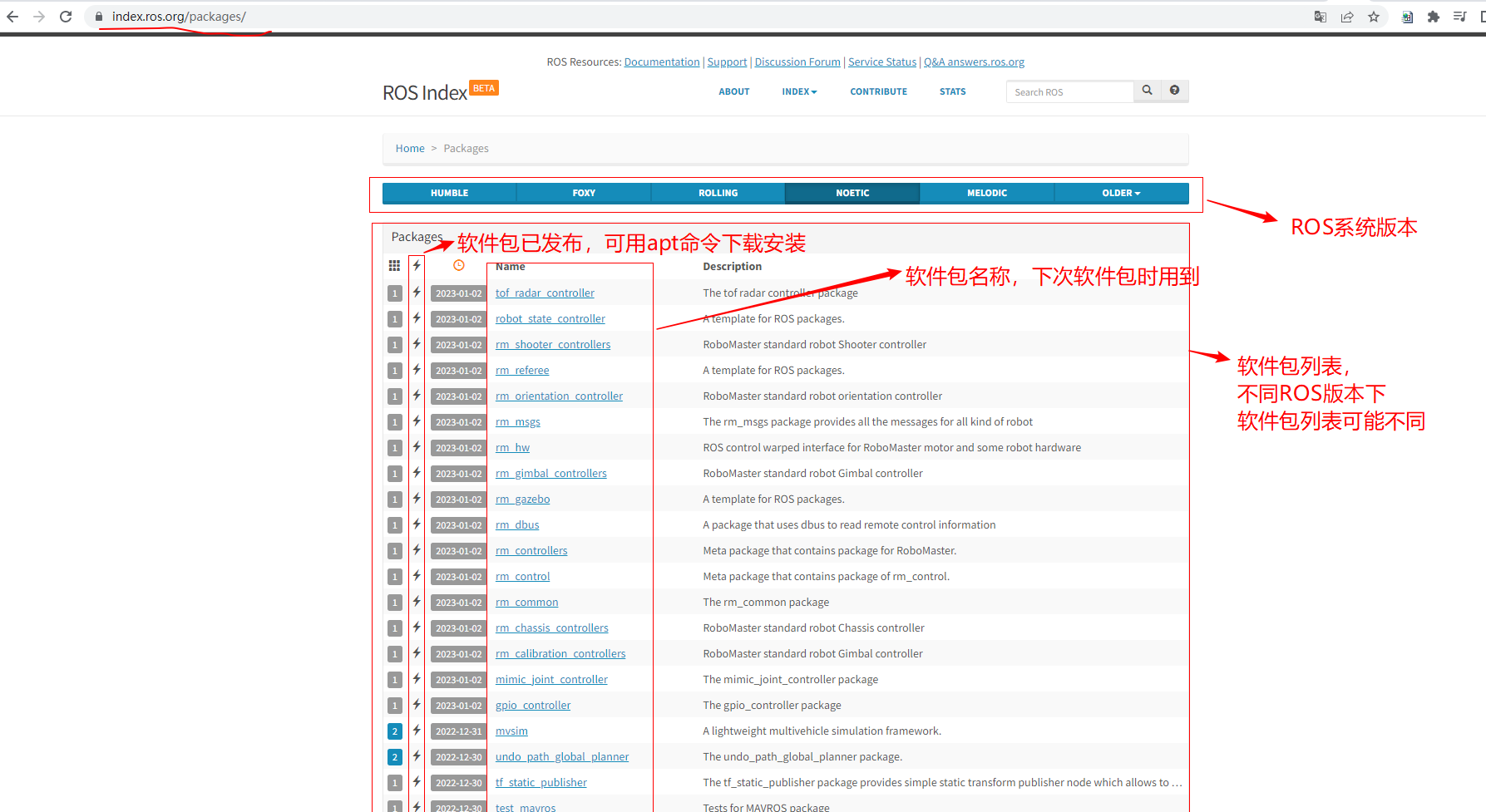
方式一、ros官方商店查询软件包:https://index.ros.org
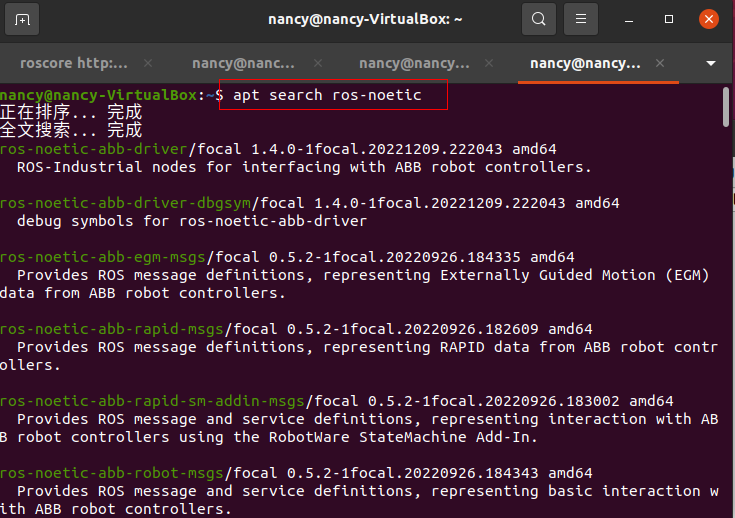
方式二:apt search ros-ros系统版本,如下图
三、ROS软件包下载安装
下载工具apt:ubuntu自带的软件包下载工具
下载软件包命令格式如下:
sudo apt install ros-ros版本-软件包名称
sudo apt install ros-noetic-rqt-robot-steering #其中ros版本为noetic,rqt_robot_steering为软件包的名称
sudo apt install ros-noetic-mvsim #其中ros版本为noetic,mvsim为软件包的名称
注意:通过apt命令下载的ros软件包都是可执行文件,可以直接运行的,一般放在/opt/ros/noetic/share/目录下,这个目录下除了单独安装的软件包,还包括当时安装ROS系统自带的一些基础包
四、ROS软件包应用实例
1.下载安装对应功能的ROS软件包,如
sudo apt install ros-noetic-rqt-robot-steering #下载控制机器人运动速度的软件包rqt_robot_steering
sudo apt install ros-noetic-turtlesim #下载控制小乌龟仿真程序软件包turtlesim
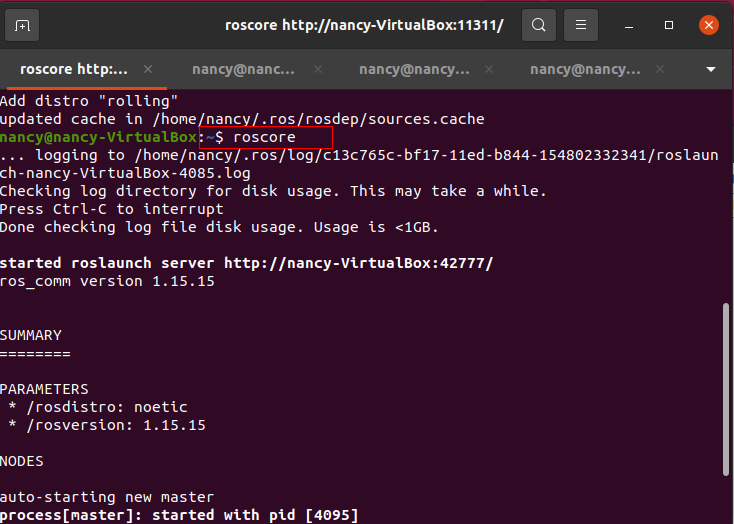
2.启动ROS系统核心程序roscore
#打开一个终端,运行下面命令
roscore
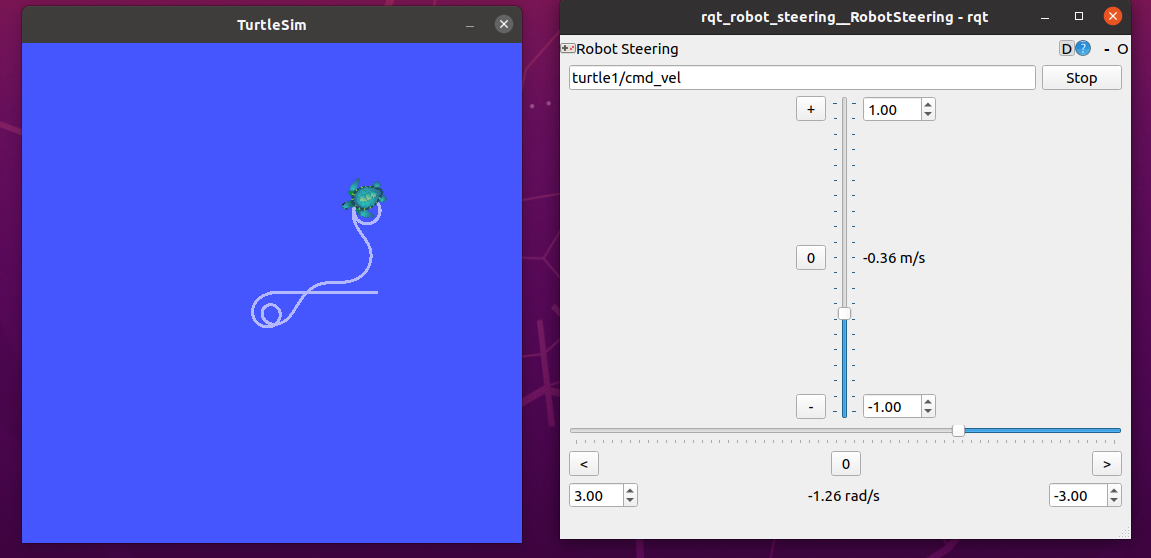
3.启动第一步下载的应用包rqt_robot_steering和turtlesim
#打开另一个终端窗口
rosrun rqt_robot_steering rqt_robot_steering #rosrun后面 第一个为包名,第二个为节点名称
#再打开另一个终端窗口
rosrun turtlesim turtlesim_node
最终效果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号