windows环境下机械臂模拟器搭建(WSL + ubuntu 18.04 + mobaxterm+Ros melodic+Moveit)
WSL + ubuntu 18.04 + mobaxterm+Ros melodic+Moveit安装配置
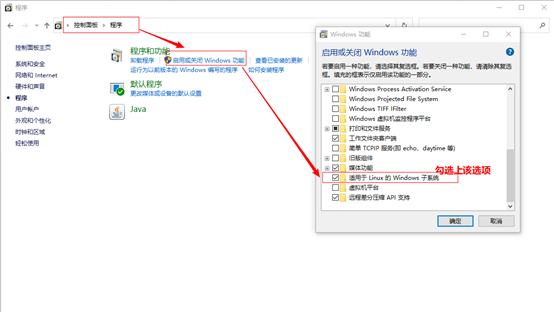
开启window功能
控制面板>程序和功能>启用或关闭window功能>勾选“适用于Linux的Windows子系统”,勾选后会要求重启
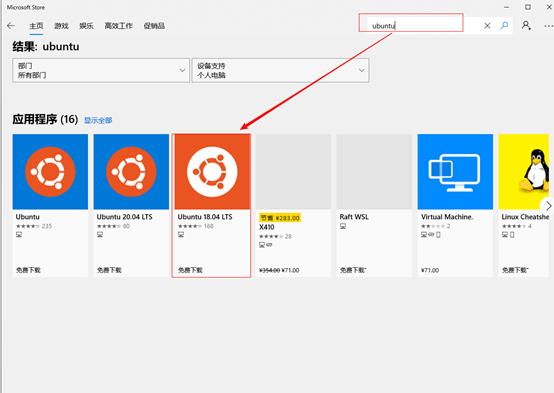
搜索并安装ubuntu18.04 LTS
打开window的 Microsoft store->搜索ubuntu,选择18.04LTS,点击右上角的免费”获取”按钮

Window菜单中启动Ubuntu18.04 LTS
就像打开应用一样,点击打开即可,之后进入初始化。然后设置用户名(不能首字母大写)、口令(密码),这里是完全独立于Window的账号
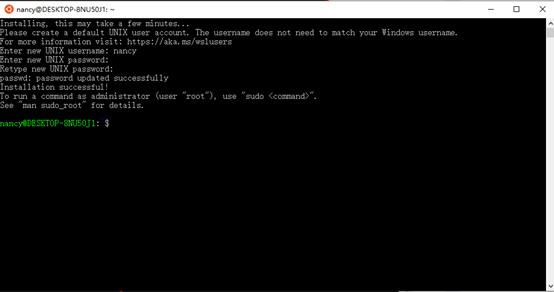
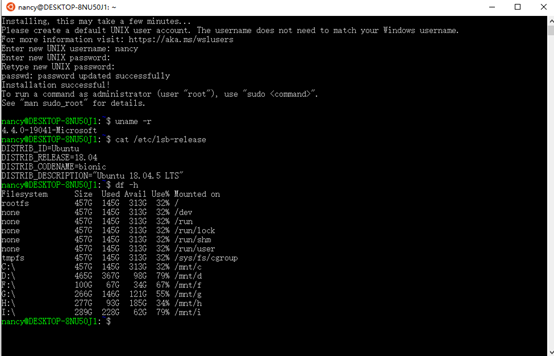
安装完成后查看下安装后的基本信息
#查看linux内核版本
uname -r
#查看系统版本
cat /etc/lsb-release
#查看本地磁盘内存情况(可见C盘、D盘)
df -h
更新软件源为阿里云
#使用 root 权限登录,后续输入密码
sudo -i
#接下来备份当前源,输入以下命令
cp /etc/apt/sources.list /etc/apt/sources.list.old
#这个sources.list文件就是源文件,删除该文件,重新写一个
rm /etc/apt/sources.list
vim /etc/apt/sources.list
输入i进入插入模式,复制下面内容,然后单击右键粘贴进去即可,之后按ESC回到命令行模式,然后输入:(英文冒号)切换到底行模式,输入wq保存并退出。
# deb cdrom:[Ubuntu 16.04 LTS _Xenial Xerus_ - Release amd64 (20160420.1)]/ xenial main restricted
deb-src http://archive.ubuntu.com/ubuntu xenial main restricted #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb http://mirrors.aliyun.com/ubuntu/ xenial multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
deb http://archive.canonical.com/ubuntu xenial partner
deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic main universe restricted multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main universe restricted multiverse #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main universe restricted multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main universe restricted multiverse #Added by software-properties
deb http://security.ubuntu.com/ubuntu/ bionic-security main universe restricted multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main universe restricted multiverse #Added by software-properties
输入下列指令更新软件镜像源和软件包
sudo apt update #更新软件源
sudo apt upgrade #更新软件包,可不操作
安装MobaXterm
链接:https://pan.baidu.com/s/1J16L8mJgzr_WhRxTeAxI6Q
提取码:s6lm
下载安装即可使用。 最新版的MobaXterm会自动识别系统中的WSL,第一次打开效果图如下,
双击WSL-ubuntu-18.04 session即可进入ubuntu-18.04系统
Ros Melodic安装
1.添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.向系统添加秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.安装Ros软件包
3.1更新系统软件:
sudo apt update
3.2 然后正式安装(为了避免之后出现缺少软件包的问题,在这里直接下载完整版Ros-Melodic软件包)
sudo apt install ros-melodic-desktop-full
此步会耗时较长,需要耐心等待,如果一边结束后显示有某些软件包漏掉未下载或下载失败,再次运行该命令即可,可能是因为下载某些软件包时网络问题。
4.初始化rosdep
为了避免后面出现sudo rosdep:找不到命令提示,这里需要执行如下指令
sudo apt install python-rosdep
然后运行命令
sudo rosdep init
成功显示如下:

5.执行rosdep update更新
rosdep update
如果出现如下错误
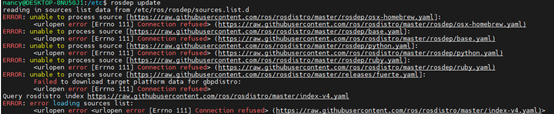
解决办法:打开terminal,输入 sudo apt install gedit 安装gedit
然后输入sudo gedit /etc/resolv.conf
在弹出的文本中把原先的nameserver注释掉,并在下方重新添加一个nameserver 8.8.8.8,如图所示:
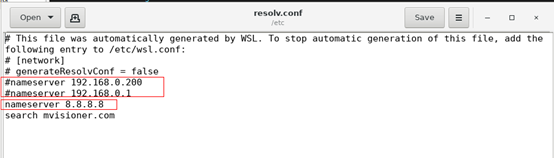
再次输入下面指令执行rosdep update更新:
rosdep update
如果出现如下错误

解决办法:大概是网络的问题,反复执行rosdep update命令即可
(如图,我执行了几次rosdep update命令运行成功!)

如果多次执行还是不行,可以设置VPN再更新,具体VPN的设置方法网上很多
6.设置环境变量:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装ros-install
为了构建和管理开发者自己的ROS工作空间,还需安装rosinstall,执行下面指令:
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
7.测试安装是否成功
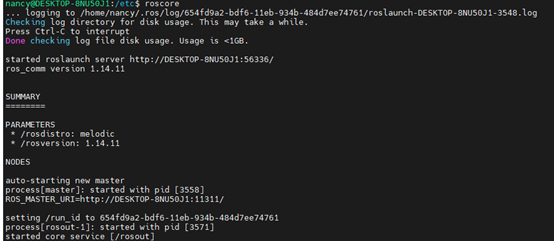
输入下面的指令启动RosMaster
roscore
如下图所示表示安装成功
Moveit安装
1. 在安装之前先对安装好的ROS系统更新一下,使用如下指令
$ rosdep update
$ sudo apt update
$ sudo apt dist-upgrade
2.下载依赖文件
sudo apt-get install python-wstool ros-kinetic-catkin python-catkin-tools clang-format-3.9
3.安装moveit
$ sudo apt-get install ros-melodic-moveit
4.创建moveit的工作空间
$ mkdir -p ws_moveit/src
5.下载教程演示的demo包到src文件夹下:
$ cd ws_moveit/src
git clone https://github.com/ros-planning/moveit_tutorials.git
git clone https://github.com/ros-planning/panda_moveit_config.git
如果失败就重新运行命令
6. 自动配齐依赖包
rosdep install --from-paths . --ignore-src --rosdistro=kinetic
rosdep install --from-paths src --ignore-src --rosdistro kinetic –y
如果出现下列错误:

解决办法::
替换命令为rosdep install --from-paths ~/ws_moveit/src --ignore-src –r
成功显示结果如下
7.下载其他依赖包:在下载好moveit_tutorials和模型配置包panda_moveit_config后,继续在github上下载以下几个包,解压到home/ ws_moveit/src文件夹下
franka_ros: https://github.com/frankaemika/franka_ros
libfranka: https://github.com/frankaemika/libfranka-release/tree/release/kinetic/libfranka
moveit_visual_tools: https://github.com/PickNikRobotics/moveit_visual_tools/tree/melodic-devel
全部下载解压后如下:

8.编译moveit的包
执行以下指令:
cd ws_moveit
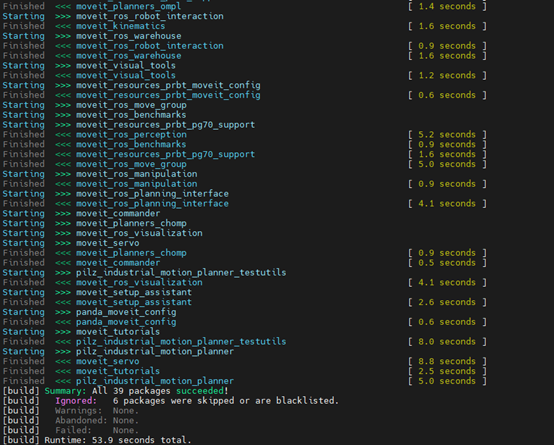
catkin build
编译成功后显示如下
如果构建结果中有出现下图所示警告或错误,则重新运行下catkin build指令

9.将编译好的包加入到环境中
$ source ~/ws_moveit/devel/setup.bash
10.查看运行效果验证安装成功
执行以下命令运行demo:
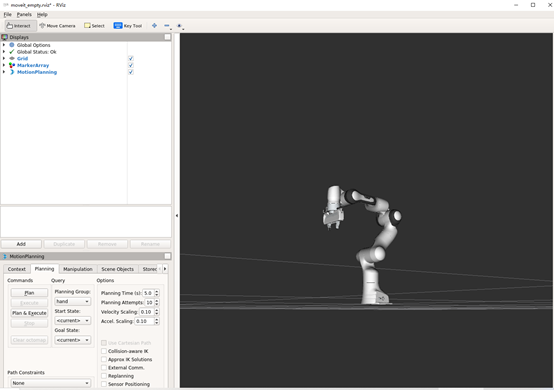
$ roslaunch panda_moveit_config demo.launch rviz_tutorial:=true
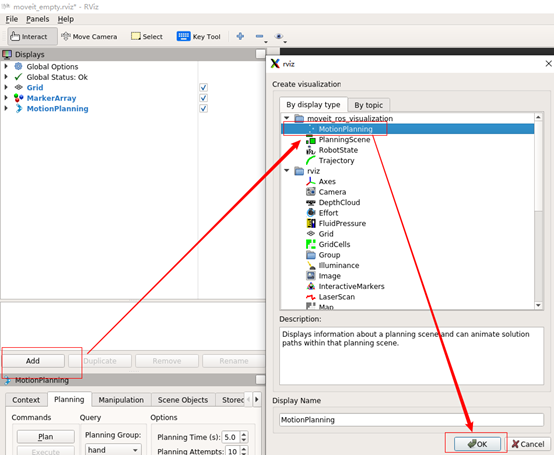
点击打开的空白rviz窗口左下侧的add按钮,找到MotionPlanning,然后点击确定。如下图所示:
最后显示结果如下
至此全部安装完毕!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号