3D目标检测读后感(一)
今天看了一篇文章Automatic Camera Calibration for Traffific Understanding
Automatic Camera Calibration for Traffic Understanding [BMVC 2014]_哔哩哔哩_bilibili
只有短短一页内容,但是从视频来看,方法很实用。
大致是解决了交通监控的3d检测框问题。第一步,是求解了图像中每个点的绝对坐标系方向,作者称为确定车辆流的3个消失正交点。消失点指的是视觉相交点,透视图中的概念。
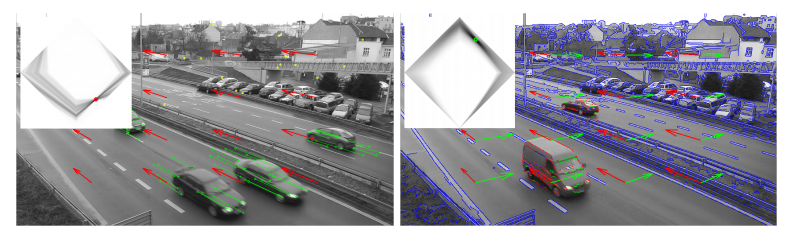
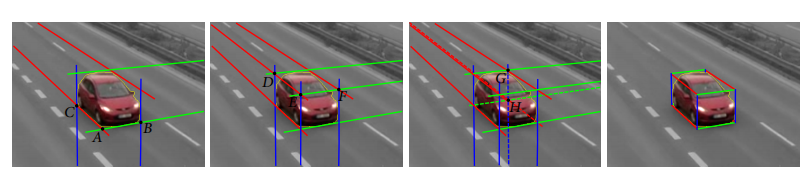
第二步,是构建3D目标检测框,从blob区域与每个点的切线方向开始构建。文章中作者没有说明如何求取切线,我认为应该是利用了sobel算子来求切线。
作者只写了短短一页纸,要讲清所有内容是不现实的,一些重要的细节根本没说,只能留给读者无限的遐想,想要复现该算法几乎不可能。
又看了他的文章BoxCars: Improving Fine-Grained Recognition of Vehicles using 3D Bounding Boxes in Traffific Surveillance
这次有源码。顺应时代发展,作者提出了一些基于深度学习求解三个消失点的方法。他认为,3D检测的关键就是求解三个消失点。一些细节部分还是写的很简略。
第三章中的D节,他利用CNN求解消失点方向,然后结合车辆轮廓来求解3D检测框,就像他上一篇文章做的一样。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号