
【python opencv】轮廓更多属性
1. 凸性缺陷
我们看到了关于轮廓的第二章的凸包。从这个凸包上的任何偏差都可以被认为是凸性缺陷。 OpenCV有一个函数来找到这个,cv.convexityDefects()。一个基本的函数调用如下:
hull = cv.convexHull(cnt,returnPoints = False)
defects = cv.convexityDefects(cnt,hull)
注意 记住,我们必须在发现凸包时,传递
returnPoints= False,以找到凸性缺陷。
它返回一个数组,其中每行包含这些值—[起点、终点、最远点、到最远点的近似距离]。我们可以用图像把它形象化。我们画一条连接起点和终点的线,然后在最远处画一个圆。记住,返回的前三个值是cnt的索引。所以我们必须从cnt中获取这些值。
import cv2 as cv import numpy as np img = cv.imread('star.jpg') img_gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY) ret,thresh = cv.threshold(img_gray, 127, 255,0) contours,hierarchy = cv.findContours(thresh,2,1) cnt = contours[0] hull = cv.convexHull(cnt,returnPoints = False) defects = cv.convexityDefects(cnt,hull) for i in range(defects.shape[0]): s,e,f,d = defects[i,0] start = tuple(cnt[s][0]) end = tuple(cnt[e][0]) far = tuple(cnt[f][0]) cv.line(img,start,end,[0,255,0],2) cv.circle(img,far,5,[0,0,255],-1) cv.imshow('img',img) cv.waitKey(0) cv.destroyAllWindows()
查看结果:

2. 点多边形测试
这个函数找出图像中一点到轮廓线的最短距离。它返回的距离,点在轮廓线外时为负,点在轮廓线内时为正,点在轮廓线上时为零。
例如,我们可以检查点(50,50)如下:
dist = cv.pointPolygonTest(cnt,(50,50),True)
在函数中,第三个参数是measureDist。如果它是真的,它会找到有符号的距离。如果为假,则查找该点是在轮廓线内部还是外部(分别返回+1、-1和0)。
注意 如果您不想找到距离,请确保第三个参数为False,因为这是一个耗时的过程。因此,将其设置为False可使速度提高2-3倍。
3. 形状匹配
OpenCV附带一个函数cv.matchShapes(),该函数使我们能够比较两个形状或两个轮廓,并返回一个显示相似性的度量。结果越低,匹配越好。它是根据矩值计算出来的。不同的测量方法在文档中有解释。
import cv2 as cv import numpy as np img1 = cv.imread('star.jpg',0) img2 = cv.imread('star2.jpg',0) ret, thresh = cv.threshold(img1, 127, 255,0) ret, thresh2 = cv.threshold(img2, 127, 255,0) contours,hierarchy = cv.findContours(thresh,2,1) cnt1 = contours[0] contours,hierarchy = cv.findContours(thresh2,2,1) cnt2 = contours[0] ret = cv.matchShapes(cnt1,cnt2,1,0.0) print( ret )
我尝试过匹配下面给出的不同形状的形状:
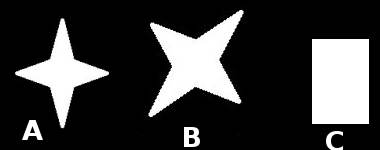
我得到以下结果: - 匹配的图像A与本身= 0.0 - 匹配图像A与图像B = 0.001946 - 匹配图像A与图像C = 0.326911
看,即使是图像旋转也不会对这个比较产生很大的影响。
参考 Hu矩是平移、旋转和比例不变的七个矩。第七个是无偏斜量。这些值可以使用cpu.HuMoments()函数找到。
对轮廓的这些属性暂时不是很感兴趣,就直接摘抄下来了。
摘自:http://woshicver.com/FifthSection/4_9_4_%E8%BD%AE%E5%BB%93%EF%BC%9A%E6%9B%B4%E5%A4%9A%E5%B1%9E%E6%80%A7/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号