
【python opencv】轮廓特征
1、特征矩
特征矩可以帮助您计算一些特征,例如物体的质心,物体的面积等。
函数cv.moments()提供了所有计算出的矩值的字典:
import numpy as np import cv2 as cv img = cv.imread('star.jpg',0) ret,thresh = cv.threshold(img,127,255,0) contours,hierarchy = cv.findContours(thresh, 1, 2) cnt = contours[0] M = cv.moments(cnt) print( M )
{'m00': 33499.0,
'm01': 8793702.666666666,
'm02': 2409403646.833333,
'm03': 685511505862.8,
'm10': 8384054.0,
'm11': 2200871350.6666665,
'm12': 603023656059.5,
'm20': 2199493589.5,
'm21': 577381344709.9333,
'm30': 601117677270.0,
'mu02': 101000214.2013011,
'mu03': 1162863.115234375,
'mu11': 3324.239688873291,
'mu12': 1812195.5510406494,
'mu20': 101151505.41044497,
'mu21': -1514017.5661506653,
'mu30': 1453081.0164794922,
'nu02': 0.09000333645341069,
'nu03': 5.661727831836976e-06,
'nu11': 2.962297313282231e-06,
'nu12': 8.823186369609854e-06,
'nu20': 0.09013815511401155,
'nu21': -7.371422551688403e-06,
'nu30': 7.07473573212249e-06}
从这一刻起,您可以提取有用的数据,例如面积,质心等。质心由关系给出,$C_x = \frac{M_{10}}{M_{00}}$ 和 $C_y = \frac{M_{01}}{M_{00}}$。可以按照以下步骤进行:
cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00'])
250
262
2、轮廓面积
轮廓区域由函数cv.contourArea()或从矩M['m00']中给出。
area = cv.contourArea(cnt)
3、轮廓周长
也称为弧长。可以使用cv.arcLength()函数找到它。第二个参数指定形状是闭合轮廓(True)还是曲线。
perimeter = cv.arcLength(cnt,True)
4、轮廓近似
根据我们指定的精度,它可以将轮廓形状近似为顶点数量较少的其他形状。它是Douglas-Peucker算法的实现。
为了理解这一点,假设您试图在图像中找到一个正方形,但是由于图像中的某些问题,您没有得到一个完美的正方形,而是一个“坏形状”(如下图所示)。现在,您可以使用此功能来近似形状。在这种情况下,第二个参数称为epsilon,它是从轮廓到近似轮廓的最大距离。它是一个精度参数。需要正确选择epsilon才能获得正确的输出。
import cv2 as cv import numpy as np from matplotlib import pyplot as plt from google.colab.patches import cv2_imshow img=cv.imread('轮廓近似.jpg',0)
ret,thresh = cv.threshold(img,127,255,0) contours,hierarchy = cv.findContours(thresh, 1, 2) cnt = contours[0]
epsilon = 0.1*cv.arcLength(cnt,True) approx = cv.approxPolyDP(cnt,epsilon,True) print(approx) image = cv.cvtColor(img, cv.COLOR_GRAY2BGR) cv.polylines(image, [approx], True, (255, 0, 0), 2)
[[[ 11 14]] [[ 11 137]] [[194 137]] [[194 14]]]

我们将0.1改为0.01:
[[[ 11 14]] [[ 11 48]] [[ 26 54]] [[ 11 56]] [[ 11 112]] [[ 47 102]] [[ 13 120]] [[ 11 137]] [[ 78 137]] [[ 98 100]] [[119 137]] [[194 137]] [[194 85]] [[174 84]] [[194 77]] [[194 14]] [[171 14]] [[153 41]] [[161 14]] [[ 62 14]] [[ 65 37]] [[ 54 14]]]

5、轮廓凸包
凸包外观看起来与轮廓逼近相似,但不相似(在某些情况下两者可能提供相同的结果)。在这里,cv.convexHull()函数检查曲线是否存在凸凹缺陷并对其进行校正。一般而言,凸曲线是始终凸出或至少平坦的曲线。如果在内部凸出,则称为凸度缺陷。例如,检查下面的手的图像。红线显示手的凸包。双向箭头标记显示凸度缺陷,这是凸包与轮廓线之间的局部最大偏差。

关于它的语法,有一些需要讨论:
hull = cv.convexHull(points[, hull[, clockwise[, returnPoints]]
参数详细信息: - 点是我们传递到的轮廓。 - 凸包是输出,通常我们忽略它。 - 顺时针方向:方向标记。如果为True,则输出凸包为顺时针方向。否则,其方向为逆时针方向。 - returnPoints:默认情况下为True。然后返回凸包的坐标。如果为False,则返回与凸包点相对应的轮廓点的索引。
因此,要获得如上图所示的凸包,以下内容就足够了:
hull = cv.convexHull(cnt)
但是,如果要查找凸度缺陷,则需要传递returnPoints = False。为了理解它,我们将拍摄上面的矩形图像。首先,我发现它的轮廓为cnt。现在,我发现它的带有returnPoints = True的凸包,得到以下值:[[[234 202]],[[51 202]],[[51 79]],[[234 79]]],它们是四个角 矩形的点。现在,如果对returnPoints = False执行相同的操作,则会得到以下结果:[[129],[67],[0],[142]]。这些是轮廓中相应点的索引。例如,检查第一个值:cnt [129] = [[234,202]]与第一个结果相同(对于其他结果依此类推)。
6、检查凸度
cv.isContourConvex()具有检查曲线是否凸出的功能。它只是返回True还是False。没什么大不了的。
k = cv.isContourConvex(cnt)
7、边界矩形
有两种类型的边界矩形。
(1)直角矩形
它是一个矩形,不考虑物体的旋转。所以边界矩形的面积不是最小的。它是由函数cv.boundingRect()找到的。
令(x,y)为矩形的左上角坐标,而(w,h)为矩形的宽度和高度。
x,y,w,h = cv.boundingRect(cnt)
cv.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
(2)旋转矩形
这里,边界矩形是用最小面积绘制的,所以它也考虑了旋转。使用的函数是cv.minAreaRect()。它返回一个Box2D结构,其中包含以下细节 -(中心(x,y),(宽度,高度),旋转角度)。但要画出这个矩形,我们需要矩形的四个角。它由函数cv.boxPoints()获得
rect = cv.minAreaRect(cnt) box = cv.boxPoints(rect) box = np.int0(box) cv.drawContours(img,[box],0,(0,0,255),2)
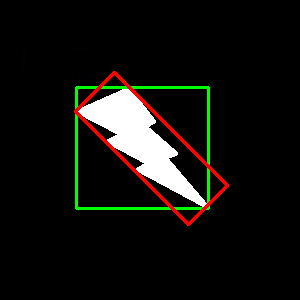
两个矩形都显示在一张单独的图像中。绿色矩形显示正常的边界矩形。红色矩形是旋转后的矩形。
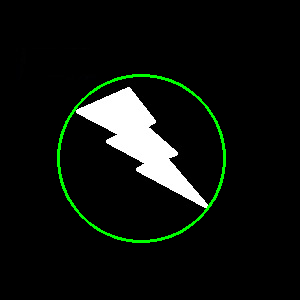
8、最小闭合圈
接下来,使用函数*cv.minEnclosingCircle(()查找对象的圆周。它是一个以最小面积完全覆盖物体的圆。
(x,y),radius = cv.minEnclosingCircle(cnt) center = (int(x),int(y)) radius = int(radius) cv.circle(img,center,radius,(0,255,0),2)
9、拟合一个椭圆
下一个是把一个椭圆拟合到一个物体上。它返回内接椭圆的旋转矩形。
ellipse = cv.fitEllipse(cnt)
cv.ellipse(img,ellipse,(0,255,0),2)
10、拟合直线
rows,cols = img.shape[:2] [vx,vy,x,y] = cv.fitLine(cnt, cv.DIST_L2,0,0.01,0.01) lefty = int((-x*vy/vx) + y) righty = int(((cols-x)*vy/vx)+y) cv.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)
参考:
http://woshicver.com/FifthSection/4_9_2_%E8%BD%AE%E5%BB%93%E7%89%B9%E5%BE%81/


