


4. Orthogonality
4.1 Orthogonal Vectors and Suspaces
-
Orthogonal vectors have \(v^Tw=0\),and \(||v||^2 + ||w||^2 = ||v+w||^2 = ||v-w||^2\).
-
Subspaces \(V\) and \(W\) are orthogonal when \(v^Tw = 0\) for every \(v\) in V and every \(w\) in W.
-
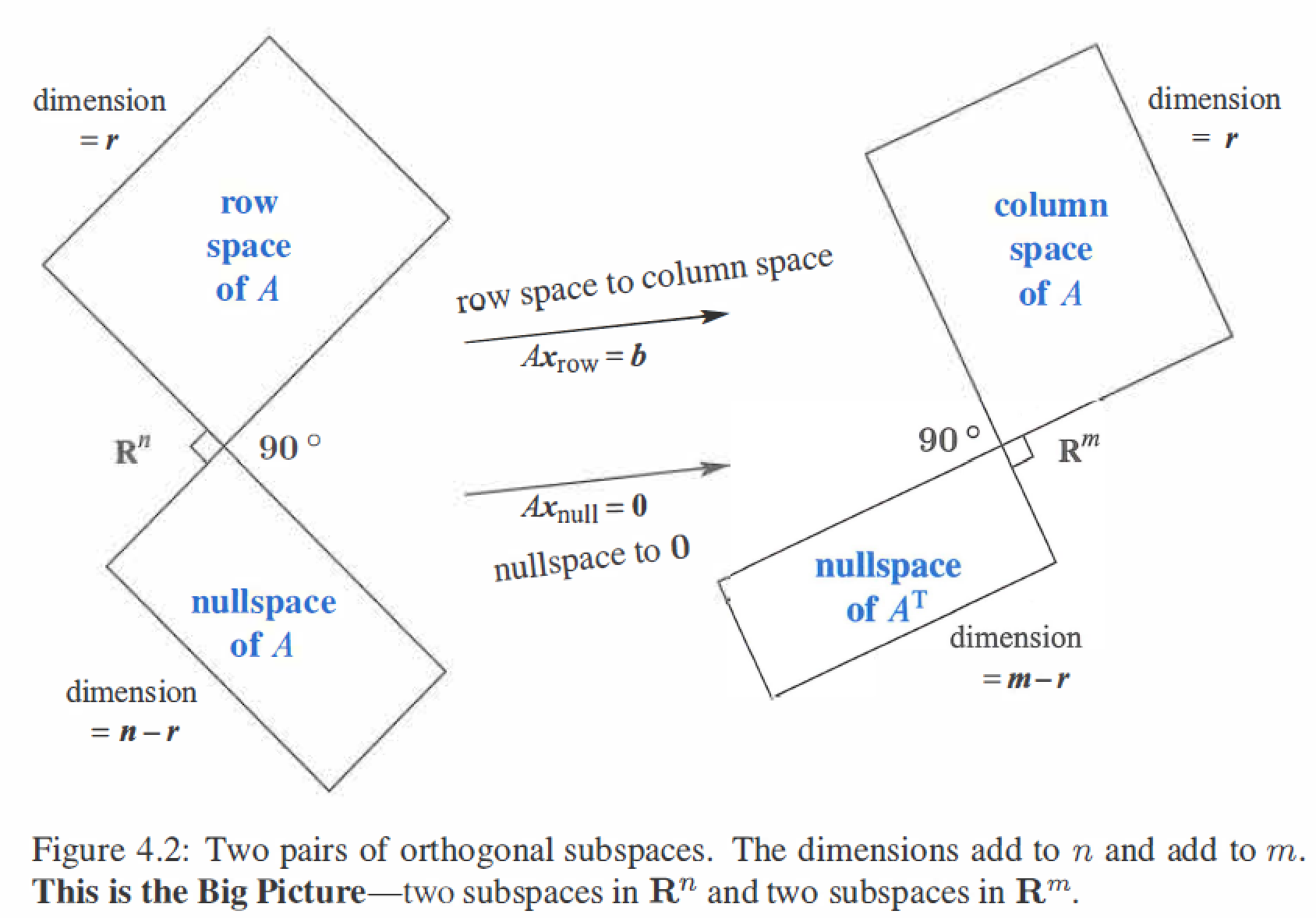
Four Subspaces Relations:
-
Every vector x in the nullspace is perpendicular to every row of A, because \(Ax=0\).The nullspace N(A) and the row space \(C(A^T)\) are orthogonal subspaces of \(R^n\). \(N(A) \bot C(A^T)\)
\[Ax = \left[ \begin{matrix} &row_1& \\ &\vdots \\ &row_m \end{matrix} \right] \left[ \begin{matrix} && \\ &x \\ && \end{matrix} \right] = \left[ \begin{matrix} &0& \\ &\vdots \\ &0 \end{matrix} \right] \] -
Every vector y in the nullspace of \(A^T\) is perpendicular to every column of A, because \(A^Ty=0\).The left nullspace \(N(A^T)\) and the column space \(C(A)\) are orthogonal subspaces of \(R^m\). \(N(A^T) \bot C(A)\)
\[A^Ty = \left[ \begin{matrix} &(column_1)^T& \\ &\vdots \\ &(column_m)^T \end{matrix} \right] \left[ \begin{matrix} && \\ &y \\ && \end{matrix} \right] = \left[ \begin{matrix} &0& \\ &\vdots \\ &0 \end{matrix} \right] \] -
The nullspace N(A) and the row space \(C(A^T)\) are orthogonal complements, with dimensions (n-r) + r = n. Similarly \(N(A^T)\) and C(A) are orthogonal complements with (m-r) + r = m.
-
4.2 Projection
When b is not in the columns space C(A),then Ax = b is unsolvable,so find the projection p of b onto C(A),make \(A\hat{x} = p\) is solvable.
Three Steps:
- Find \(\hat{x}\)
- Find p
- Find project matrix P
Projection Onto a Line
A line goes through the origin in the direction of \(a=(a_1, a_2,...,a_m)\).
Along that line, we want the point \(p\) closest to \(b=(b_1,b_2,...,b_m)\).
The key to projection is orthogonality : The line from b to p is perpendicular to the vector a.
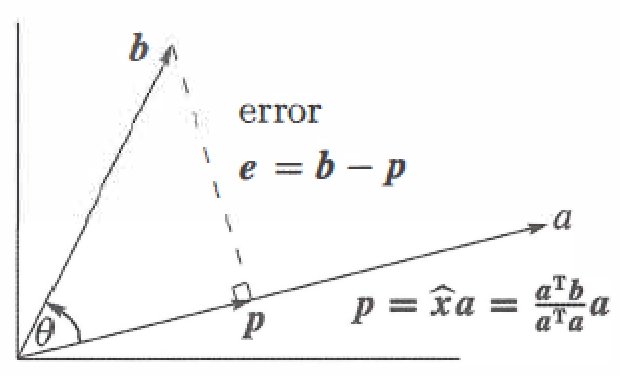
Projecting b onto a with error \(e=b-\hat{x}a\) :
\(P=P^T\) (P is symmetric) , \(P^2=P\)
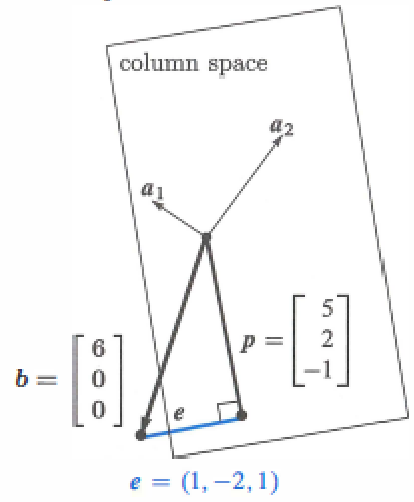
Projection Onto a Subspace
Start with n independent vectors \(A=(a_1,...,a_n)\) in \(R^m\), find the combination \(p=\hat{x}a_1 + \hat{x}a_2 +...+\hat{x_n}a_n\) closest to a givent vector b.
\(P=P^T\) (P is symmetric) , \(P^2=P\)
4.3 Least Squares Approximations
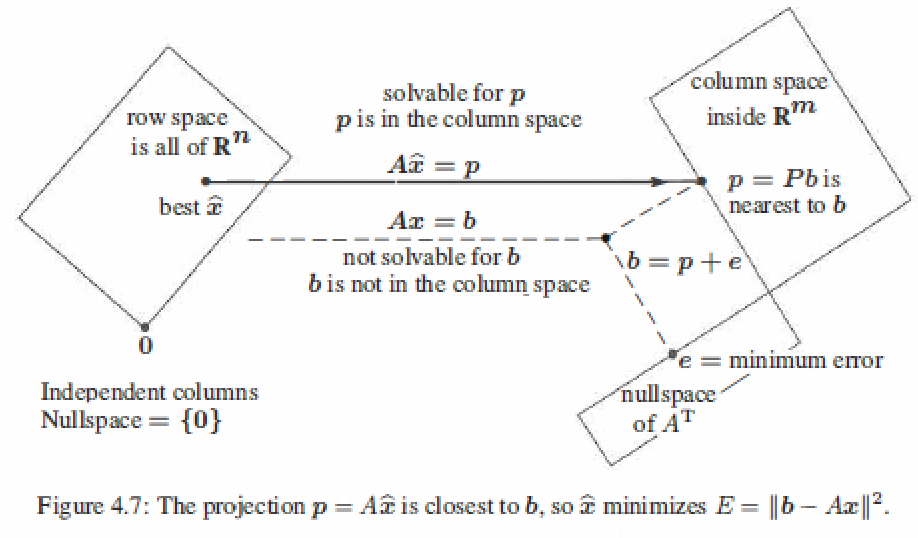
When b is outside the column space of A, that \(Ax=b\) has no solution. Find the length of \(e=b-Ax\) as small as possible, get a \(\hat{x}\) is a least squares solution.
If A has independent columns, then \(A^TA\) is invertible.
proof :
so \(N(A^TA)\) has only zero vector, \(A^TA\) is invertible.
Linear algebra method (projection method)
Sovling \(A^TA\hat{x} = A^Tb\) gives the projection \(p=A\hat{x}\) of b onto the column space of A.
example: \(A = \left[ \begin{matrix} 1&1 \\ 1&2 \\ 1&3 \end{matrix} \right], x= \left[ \begin{matrix} C \\ D \end{matrix} \right], b=\left[ \begin{matrix} 1 \\ 2 \\ 2 \end{matrix} \right], Ax=b\) is unsolvable.
Calculus method
The least squares solution \(\hat{x}\) makes the sum of errors \(E = ||Ax - b||^2\) as small as possible.
example: \(A = \left[ \begin{matrix} 1&1 \\ 1&2 \\ 1&3 \end{matrix} \right], x= \left[ \begin{matrix} C \\ D \end{matrix} \right], b=\left[ \begin{matrix} 1 \\ 2 \\ 2 \end{matrix} \right], Ax=b\) is unsolvable.
The Big Picture for Least Squares
4.4 Orthonormal Bases and Gram-Schmidt
- The columns \(q_1,q_2,...,q_n\) are orthonormal if \(q_i^Tq_j = \left \{ \begin{array}{rcl} 0 \ \ for \ \ i \neq j \\ 1 \ \ for \ \ i=j \end{array}\right\}, Q^TQ=I\).
- If Q is also square, the \(QQ^T=I\) and \(Q^T=Q^{-1}\), Q is an orthogonal matrix.
- The least squares solution to \(Qx = b\) is \(\hat{x} = Q^Tb\). Projection of b : \(p=QQ^Tb = Pb\).
Projection Using Orthonormal Bases: Q Repalces A
Orthogonal matrices are excellent and stable for computations.
Suppose the basis vectors are actually orthonormal, then \(A^TA\) simplifies to \(Q^TQ\), here is \(\hat{x} = Q^Tb\) and \(p=Q\hat{x}=QQ^Tb\).
The Gram-Schmidt Process
"Gram-Schmidt way" is to create orthonormal vectors.Take independent column vecotrs \(a_i\) to orthonormal \(q_i\).
From independent vectors \(a_1,...,a_n\),Gram-Schmidt constructs orthonormal vectors \(q_1,...,q_n\).The matrices with these columns satisfy \(A=QR\). The \(R=Q^TA\) is upper triangular because later q's are orthoganal to a's.
Gram-Schmidt Process:
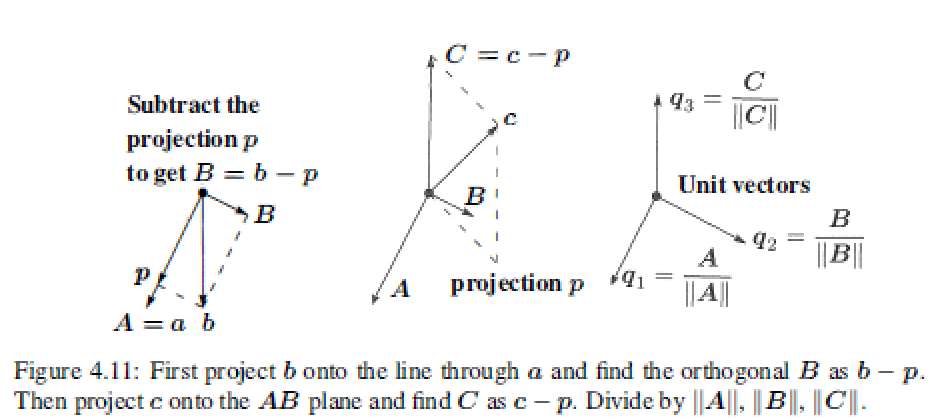
Subtract from every new vector its projections in the directions already set.
- First step : Chosing A=a and \(B = b-\frac{A^Tb}{A^TA}A\) -----> $A \bot B $
- Second step : \(C = c-\frac{A^Tc}{A^TA}A - \frac{B^Tc}{B^TB}B\) -----> $C \bot A \ \ C \bot B $
- Last step (orthonormal): \(q_1 = \frac{A}{||A||},q_2 = \frac{B}{||B||},q_3 = \frac{C}{||C||}\)
The \(q_1,q_2,q_3\) is the orthgonormal base. \(Q=\left[ \begin{matrix} && \\ q_1&q_2&q_3 \\ && \end{matrix} \right]\)
**The Factorization M = QR **:
Any m by n matrix M with independent columns can be factored into \(M=QR\).
example:
Suppose the independent not-orthogonal vectors \(a,b,c\) are
Then A=a has \(A^TA=2, A^Tb=2\)
First step : \(B=b-\frac{A^Tb}{A^TA}A = \left[ \begin{matrix} 1 \\ 1 \\ -2\end{matrix} \right]\)
Second step : \(C=c-\frac{A^Tc}{A^TA}A -\frac{B^Tc}{B^TB}B = \left[ \begin{matrix} 1 \\ 1 \\ 1\end{matrix} \right]\)
Last step : \(q_1 = \frac{A}{||A||}= \frac{1}{\sqrt{2}}\left[ \begin{matrix} 1 \\ -1 \\ 0\end{matrix} \right],q_2 = \frac{B}{||B||}=\frac{1}{\sqrt{6}}\left[ \begin{matrix} 1 \\ 1 \\ -2\end{matrix} \right],q_3 = \frac{C}{||C||}=\frac{1}{\sqrt{3}}\left[ \begin{matrix} 1 \\ 1 \\ 1\end{matrix} \right]\)
Factorization :
Least squares
Instead of solving \(Ax=b\), which is impossible, we finally solve \(R\hat{x}=Q^Tb\) by back substitution which is very fast.

