



3. Vector Spaces and Subspaces
3.1 Vector Spaces
The space \(R^n\) consists of all colunm vectors \(v\) with n components. We can add any vectors in \(R^n\) , and we can multiply any vector \(v\) by any scalar c , the result stays in the space \(R^n\).
examples:
columns between brackets : \(\left[ \begin{matrix} 4 \\ \pi \end{matrix} \right]\) is in \(R^2\)
commas and parentheses : (1,1,0,1,1) is in \(R^5\)
complex numbers spaces : \(\left[ \begin{matrix} 1 + i \\ 1-i \end{matrix} \right]\)
3.2 Subspaces
A subspace of a vector space is a set of vectors (including 0) that satisfies two requirements.
If \(v\) and \(w\) are vectors in the subspace and c is any scalar, then:
- rule 1 : \(v + w\) is in the subspace.
- rule 2 : \(cv\) is in the subspace.
- rule 1 + rule 2 : $cv + dw $ is in the subspace. (subspace is closed.)
Every subspace contains the zero vector.
Example: \(R^3\) subspaces
- The whole space \(R^3\) is a subspace (of itself)-- The largest one.
- Any lines through (0,0,0) -- L
- Any plane through (0,0,0) -- P
- The single vector (0,0,0) -- Z (zero vectors space--The littlest one)
3.3 Column Space
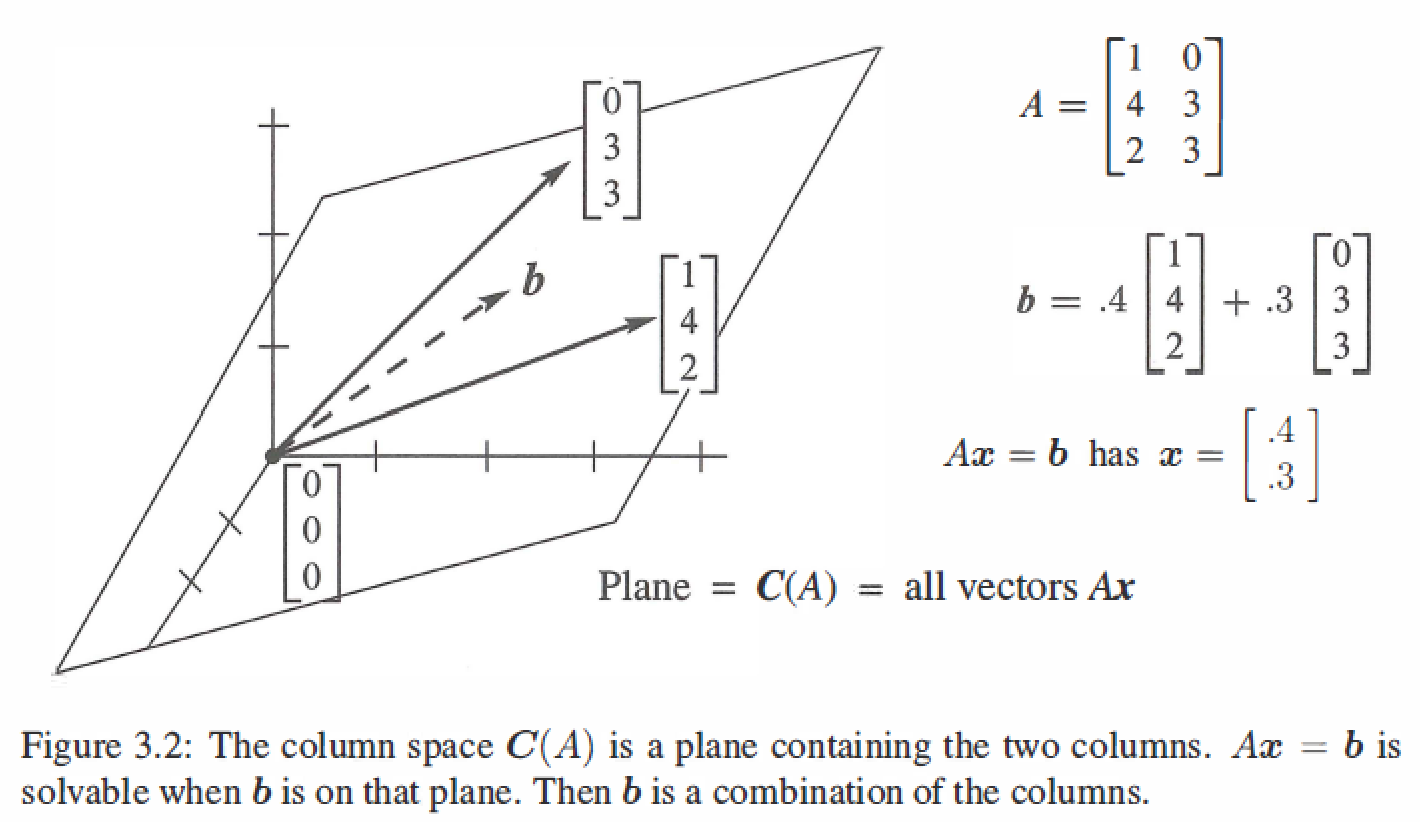
Ax =b , the column space of A is denoted by C(A) , C(A) contains not just the n columns of A, but all their combinations Ax,C(A) is a subspace of \(R^m\).
The system Ax=b is solvable if and only if b is in the column space of A.
example:
3.4 The Nullspace : Ax=0 or Rx=0
Key notes:
- The nullspace N(A) in \(R^n\) contains all solutions x to \(Ax=0\). This includes x=0.
- Elimination (from A to U to R) does not change the nullspace : N(A)=N(U)=N(R).
- The reduced row echelon form R=rref(A) has all pivots = 1, with zeros above and below.
- If column j of R is free (no pivot), there is "special solution" to Ax=0 with \(x_j=1\).
- Number of pivots = number of nonzero rows in R = rank r . There are n-r free columns(variables\dimensions).
- Every matrix with m<n has nonzero solutions to Ax=0 in its nullspace.
Solution steps:
- reducing A to its row echelon form R.
- finding the special solutions to Ax=0. ( Ux = 0 or Rx = 0)
- N(A) = N(U) = N(R) = all combinations of special solutions.
3.5 The Complete solutions : Ax=b or Rx = d
Key notes:
- Complete solution to Ax=b : x = (one particular solution \(x_p\)) + (any \(x_n\) in the nullspace).
- Elimination on [A b] leads to [R d]. Then Ax=b is equivalent to Rx=d.
- Ax = b and Rx=d are solvable only when all zero rows of R have zeros in d.
- When Rx=d is solvable, one very particular solution \(x_p\) has all free variables equal to zero.
- A has full rank r=n when its nullspace N(A) = zero vector : no free variables.
- A has full row rank r = m when its column space C(A) is \(R^m\) : Ax=b is always solvable.
Solution steps:
- Produce the augmented matrix [A b]
- Get Elimination form [R d]
- Set free variables = 0, and get a particular solution -- \(x_p\)
- Set free variables = 1 or 0,and get n - r special solutions -- \(x_n\)
- Complete solution: \(x = x_p + x_n\)
example:
The four possibilities for linear equations depend on the rank k :
- r = m = n , square and invertible, \(R = [I]\),Ax = b has 1 solution (unkowns=equations)
- r = m < n, short and wide, \(R = [I \ \ F]\),Ax = b has infinite solutions (unkowns > equations)
- r = n < m,Tall and thin,\(R = \left [ \begin{matrix} I \\ F\end{matrix}\right]\), Ax = b 0 or 1 solutions (unkonwns < equations)
- r < n and r < m,not full rank,\(R = \left [ \begin{matrix} I&F \\ 0&0 \end{matrix}\right]\), Ax=b has 0 or infinite solutions
3.6 Independence, Basis and Dimension
Independent
- Independent columns of A : The only solution to Ax=0 is x=0, the nullspace is Z.
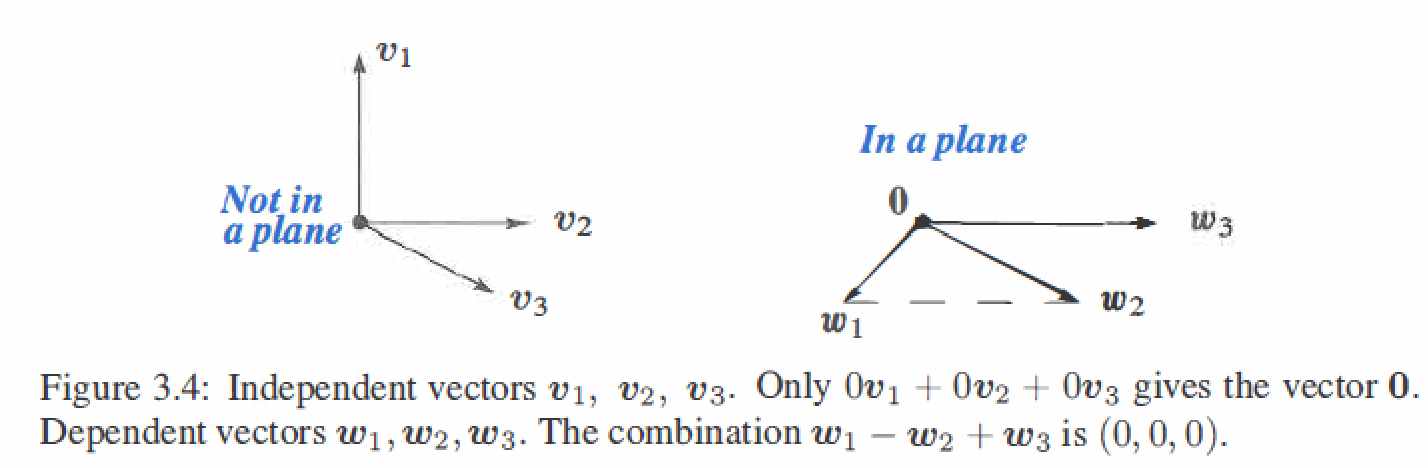
- Independent vectors : The only zero combination \(c_1v_1 + c_2v_2 + ... + c_kv_k = 0\) has all c's = 0.
- A matrix with m<n has dependent columns : At least n-m free variables/special solutions.
Basis
A basis for a vector space is a sequence of vectors with two properties:
- The basis vectors are linearly independent.
- They span the space.
- The rows are in \(R^n\) spanning the row space.
- The columns are in \(R^m\) spanning the column space.
Every vector \(v\) in the space is a combination of the basis vectors, because they span the space, and there is only one way to write \(v\) as a combination of the basis vectors.
The pivot columns of A are a basis for its column space. The pivot rows of A are a basis for its row space. So are the pivot rows of its echelon form R.
- a basis of \(C(A)\) = pivots columns of A.
- a basis of \(C(A^T)\) = pivots rows of A.
example:
The column spaces of A and R are different and their bases are different.
Column 1 of R is the pivot column, which alone is a basis for C(R): \(\left[ \begin{matrix} 1 \\ 0\end{matrix} \right]\)
Column 1 of A is the pivot column, which alone is a basis for C(A): \(\left[ \begin{matrix} 2 \\ 3\end{matrix} \right]\)
Row 1 of R is the pivot row, which alone is a basis for \(C(R^T)=C(A^T)\): \(\left[ \begin{matrix} 1&2 \end{matrix} \right]\)
Dimension
The dimension of a space is the number of vectors in every basis.
Bases for Matrix Spaces and Function Spaces
Matrix spaces:
- The vector space M contains all n by n matrices, its dimension is \(n^2\).
- The dimension of the subspace of upper triangular matrices is \(1/2n^2 + 1/2 n\).
- The dimension of the subspace of diagonal matrices is n.
- The dimension of the subspace of symmetric matrices if \(1/2n^2 + 1/2 n\).
example:
One basis
Every A combines the basis matrices
Function spaces:
- \(y''=0\) is solved by any linear function \(y = cx + d\),the space bases has x and 1.
- \(y'' = -y\) is solved by any combination \(y= csinx + dcosx\), the space bases has \(sinx\) and \(cosx\).
- \(y'' = y\) is solved by any combination \(y=ce^x + de^{-x}\),the space bases has \(e^x\) and \(e^{-x}\).
3.7 Dimensions of the Four Subspaces
Keys notes:
-
The column space is \(C(A)\),a subspace of \(R^m\), has a dimensions r,\(r=pivot \ \ columns\)
-
The row space is \(C(A^T)\),a subspace of \(R^n\), has a dimensions r, \(r=pivot \ \ rows\)
-
The nullspace is \(N(A)\),a subspace of \(R^n\), has a dimensions \(n-r\), numbers of free variables
-
The left nullspace is \(N(A^T)\),a subspace of \(R^m\), has a dimensions \(m-r\), numbers of free rows
example : Ax = b

- The column space \(C(A)\) : r = 3 independent columns, a basis is the columns 1,2,3 of A.
- The row space \(C(A^T)\) : r = 3 independent rows, a basis is the rows 1,2,4 of A or R. (\(P_{34}EA=R\))
- The nullspace N(A) : Set b = 0, N(A) = N(R),n - r = 4 - 3 = 1 free variables, x = (1, 1, 1, 1) is the basis for N(A).
- The nullspace \(N(A^T)\) :
- m-r = 5 - 3 = 2 dimensions;
- Solve \(A^Ty = 0\),combinations of the rows give zero, get special solutions \(y_1 = (1, -1, 1, 0, 0), y_2 = (0,0,-1,1,-1)\),a basis of \(N(A^T)\) is \(y_1, y_2\).
- If EA=R, the last m-r rows of R are a basis for the left nullspace of A.
3.8 Rank One Matrices
-
Every rank one matrix is one column times one row : \(A=uv^T\)
\[\left[ \begin{matrix} 2&3&7&8 \\ 2a&3a&7a&8a \\ 2b&3b&7b&8b \end{matrix} \right] = \left[ \begin{matrix} 1 \\ a \\ b \end{matrix} \right] \left[ \begin{matrix} 2&3&7&8 \end{matrix} \right] = uv^T \] -
Every rank r matrix is a sum of r rank one matrices.
\[A =\left[ \begin{matrix} &&& \\ u_1&u_2&u_3 \\ &&& \end{matrix} \right] \left[ \begin{matrix} v_1^T \\ v_2^T \\ zero \ \ row \end{matrix} \right] = u_1v_1^T + u_2v_2^T\\ rank_A = rank1 + rank1 \]
