
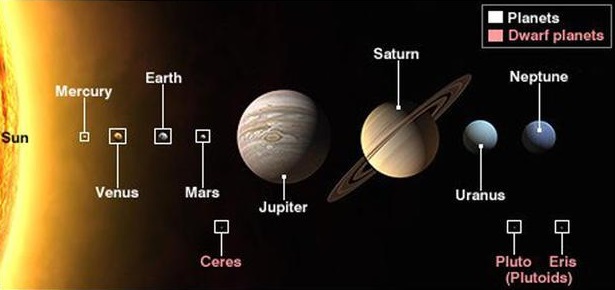
Ceres 翻译为谷神星,是太阳系中的一颗矮行星,于1801年被意大利神父 Piazzi 首次观测到,但随后 Piazzi 因为生病,跟丢了它的运行轨迹。
几个月后,德国数学家 Gauss,利用最小二乘法,仅仅依靠 Piazzi 之前观测到的12个数据,便成功的预测了谷神星的运行轨迹。
两百多年后,为了解决一些复杂的最优化问题 (如:带边界约束的非线性最小二乘、一般的无约束最优化等),谷歌开发了一个 C++ 库 Ceres Solver
之所以取名 Ceres Solver,是为了纪念 Gauss 利用最小二乘法,成功的预测了谷神星轨迹,这个在最优化、统计学、天文学历史上,都具有重要意义的事件
1 Ceres 简介
1.1 非线性最小二乘
Ceres 可用来解决带边界约束的非线性最小二乘问题,如下:
$\quad \begin{split} \min_x &\quad \frac{1}{2}\sum_{i} \rho_i\left(\left\|f_i\left(x_{i_1}, x_{i_2}, ... ,x_{i_k}\right)\right\|^2\right) \\ &\quad l_j \le x_j \le u_j \end{split}$
其中,1) $ \rho_i\left(\left\|f_i\left(x_{i_1},x_{i_2},...,x_{i_k}\right)\right\|^2\right) $ 为残差块
2) $f_i(\cdot)$ 为代价函数,取决于参数块 $\left[x_{i_1},x_{i_2},... , x_{i_k}\right]$
3) $\rho_i$ 为损失函数,是一个标量函数,主要用来消除异常点对求解过程的影响
令损失函数 $\rho_i = x$ 为恒等函数,并放宽约束条件 $[-\infty, \infty]$,则得到无约束的非线性最小二乘形式:
$\quad \begin{split}\frac{1}{2}\sum_{i} \left\|f_i\left(x_{i_1}, ... ,x_{i_k}\right)\right\|^2 \end{split}$
以上形式在科学和工程领域有着广泛的应用,如,统计学中的曲线拟合,计算机视觉的三维重建等
1.2 Ceres 的特点
1) 模型接口简洁
- 求导简单;鲁棒的损失函数;局部参数化
2) 求解方法多
- 信赖域法:Levenberg-Marquardt, Powell's Dogleg, Subspace dogleg
- 线搜索法:Non-linear Conjugate Gradients, BFGS, LBFGS
3) 求解质量高
- 在 NIST 数据集下,按照 Mondragon 和 Borchers 的测试标准,Ceres 的准确度最高

1.3 应用实例
在谷歌内部,Ceres 已经被应用于多个产品中,如:谷歌街景中汽车、飞行器的位姿估计;PhotoTours 中 3D 模型的建立;SLAM 算法 Cartographer 等
此外,一些公司和研究所也在使用 Ceres,像是 Southwest Research Institute 的机器人视觉系统标定,OpenMVG 的光束平差 (BA) 问题,Willow Garage 的 SLAM 问题等
2 编译配置
Win10 64-bit ;VS 2019 社区版,下载地址 ;CMake 解压版,下载地址
2.1 源文件
- Ceres Solver 源文件,下载地址,从 2.0 开始,需要支持 C++14 的编译器
- eigen 源文件,必须,>=3.3,下载地址
- glog 源文件,推荐,>=0.3.1,下载地址,及其依赖库 gflags,下载地址
2.2 配置生成
1) 将源文件 ceres、eigen、glog 和 gflags 解压,运行 cmake-gui.exe,配置生成 eigen (先点 "Configure",再点 "Generate" 即可)
2) 编译 gflags,先点 "Configure",再点 "Generate",然后点 "Open Project",在 VS 中打开工程,最后在 debug 和 release 模式下分别编译
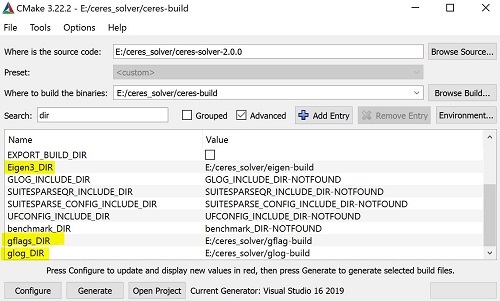
3) 编译 glog,操作同 2),其中 cmake 配置不再赘述,如:CMAKE_CONFGURATION_TYPES 只保留 Debug 和 Release,gflags_DIR 指向含 gflags-config.cmake 的目录等
4) 编译 ceres,操作同 2),注意配置 eigen、glog 和 gflags 的 _DIR 目录,并勾上 BUILD_SHARED_LIBS 以便生成 dll 库
2.3 VS 配置
将生成的 .lib 和 .dll 文件放在特定目录下,并新建 include 文件夹,汇总对应的 .h 文件
1)环境变量
计算机 -> 属性 -> 高级系统设置 -> 环境变量,编辑系统变量里的 path 变量
D:\3rdparty\gflags\bin\Debug D:\3rdparty\glog\bin\Debug D:\3rdparty\ceres\bin\Debug
2) 头文件和库文件
在 VS 中配置 ceres, eigen, glog 和 gflags 的 头文件目录,以及 库文件目录
注:在编译时,若出现头文件缺失,则在源文件中找到对应的 .h,拷贝到 include 目录中即可

3) 依赖库
添加对应的 .lib 依赖库,如下:
ceres-debug.lib gflags_debug.lib glogd.lib
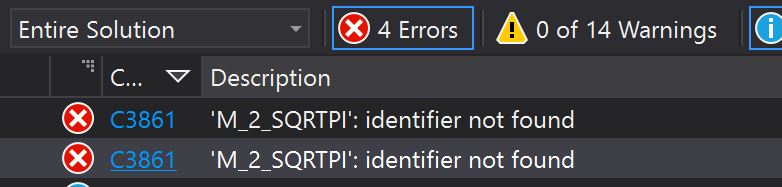
4) 错误处理
运行程序,如出现如下错误,则在 "项目属性 - C/C++ - 预处理器定义" 中,定义 _USE_MATH_DEFINES 宏可解决
3 代码实例
给定一个目标函数 $\begin{split} \frac{1}{2}(10 -x)^2 \end{split}$,求使其取值最小时,对应的 $x$
3.1 求解步骤
1) 构建代价函数
Ceres 中利用仿函数,通过重载 operator() 运算符,来实现代价函数的定义,本例中的代价函数为 $f(x) = 10 -x $
// A templated cost functor that implements the residual r = x - 10
struct CostFunctor {
template <typename T> bool operator()(const T* const x, T* residual) const {
residual[0] = x[0] - 10.0;
return true;
}
};
2) 构建残差块
// Build the problem
Problem problem;
// Set up the cost function (also known as residual)
CostFunction* cost_function = new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
problem.AddResidualBlock(cost_function, nullptr, &x);
3) 配置求解器
// The options structure, which controls how the solver operates
Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
4) 求解
// Run the solver
Solver::Summary summary;
Solve(options, &problem, &summary);
3.2 完整代码
#include "ceres/ceres.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solver;
using ceres::Solve;
// A templated cost functor that implements the residual r = x - 10.
struct CostFunctor {
template <typename T> bool operator()(const T* const x, T* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
};
int main()
{
// The variable to solve for with its initial value
double x = 0.5;
const double initial_x = x;
// Build the problem.
Problem problem;
problem.AddResidualBlock(new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor), nullptr, &x);
// The options structure, which controls how the solver operates
Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
// Run solver
Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "x : " << initial_x << " -> " << x << "\n";
}
运行结果如下:

参考资料
原文链接: http://www.cnblogs.com/xinxue/
专注于机器视觉、OpenCV、C++ 编程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号