
上篇 OpenCV 之 图像几何变换 介绍了等距、相似和仿射变换,本篇侧重投影变换的平面单应性、OpenCV相关函数、应用实例等。
1 投影变换
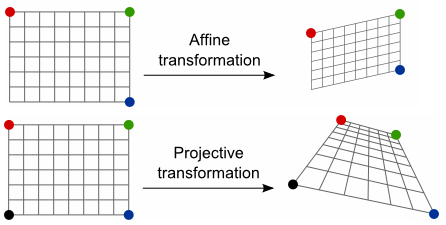
投影变换 (Projective Transformation),是仿射变换的一般化,二者区别如下:
1.1 平面单应性
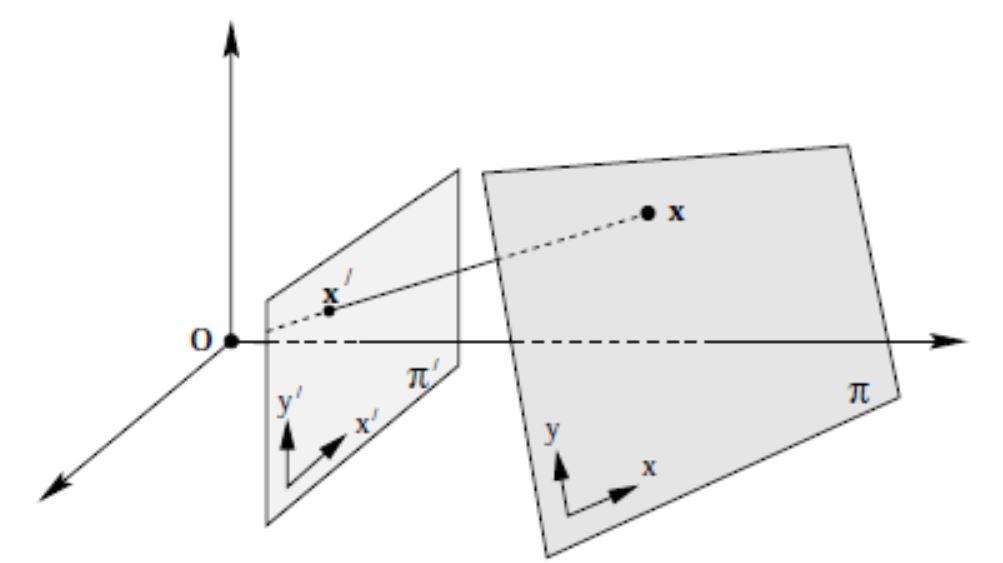
假定平面 $P^{2}$ 与 $Q^{2}$ 之间,存在映射,使得 $P^{2}$ 内任意点 $(x_p, y_q)$,满足下式:
$\quad \begin{bmatrix} x_q \\ y_q \\ 1 \end{bmatrix} = \begin{bmatrix} h_{11} & h_{12} & h_{13} \\ h_{21} & h_{22} & h_{23} \\ h_{31} & h_{32} & h_{33} \end{bmatrix} \begin{bmatrix} x_p \\ y_p \\ 1 \end{bmatrix} $
当 $H_{3 \times 3}$ 非奇异时,$P^{2}$ 与 $Q^{2}$ 之间的映射即为 2D 投影变换,也称 平面单应性, $H_{3 \times 3}$ 则为 单应性矩阵
例如:在相机标定中,如果选用 平面标定板,则 物平面 和 像平面 之间,就是一种典型的 平面单应性 映射
1.2 单应性矩阵
$H_{3 \times 3}$ 有 9 个未知数,但实际只有 8 个自由度 (DoF),其归一化有两种方法:
法一,令 $h_{33}=1$;法二,加单位向量限制 $h_{11}^2+h_{12}^2+h_{13}^2+h_{21}^2+h_{22}^2+h_{23}^2+h_{31}^2+h_{32}^2+h_{33}^2=1$
下面接着法一,继续推导公式:
$\quad x' = \dfrac{h_{11}x + h_{12}y + h_{13}}{h_{31}x + h_{32}y + 1} $
$\quad y' = \dfrac{h_{21}x + h_{22}y + h_{23}}{h_{31}x + h_{32}y + 1} $
整理得:
$\quad x \cdot h_{11} + y \cdot h_{12} + h_{13} - xx' \cdot h_{31} - yx' \cdot h_{32} = x' $
$\quad x \cdot h_{21} + y \cdot h_{22} + h_{23} - xy' \cdot h_{31} - yy' \cdot h_{32} = y' $
一组对应特征点 $(x, y) $ -> $ (x', y')$ 可构造 2 个方程,要求解 8 个未知数 (归一化后的),则需要 8 个方程,4 组对应特征点
$\quad \begin{bmatrix} x_{1} & y_{1} & 1 &0 &0&0 & -x_{1}x'_{1} & -y_{1}x'_{1} \\ 0&0&0& x_{1} & y_{1} &1& -x_{1}y'_{1} & -y_{1}y'_{1} \\ x_{2} & y_{2} & 1 &0 &0&0 & -x_{2}x'_{2} & -y_{2}x'_{2} \\ 0&0&0& x_{2} & y_{2} &1& -x_{2}y'_{2} & -y_{2}y'_{2} \\ x_{3} & y_{3} & 1 &0 &0&0 & -x_{3}x'_{3} & -y_{3}x'_{3} \\ 0&0&0& x_{3} & y_{3} &1& -x_{3}y'_{3} & -y_{3}y'_{3} \\ x_{4} & y_{4} & 1 &0 &0&0 & -x_{4}x'_{4} & -y_{4}x'_{4} \\ 0&0&0& x_{4} & y_{4} &1& -x_{4}y'_{4} & -y_{4}y'_{4} \end{bmatrix} \begin{bmatrix} h_{11} \\ h_{12}\\h_{13}\\h_{21}\\h_{22}\\h_{23}\\h_{31}\\h_{32} \end{bmatrix} = \begin{bmatrix} x'_{1}\\y'_{1}\\x'_{2}\\y'_{2}\\x'_{3}\\y'_{3}\\x'_{4}\\y'_{4} \end{bmatrix} $
因此,求 $H$ 可转化为求解 $Ax=b$,参见 OpenCV 中 getPerspectiveTransform() 的源码实现
2 OpenCV 函数
2.1 投影变换矩阵
a) 四组对应特征点:已知四组对应特征点坐标,带入 getPerspectiveTransform() 函数中,可求解 src 投影到 dst 的单应性矩阵 $H_{3 \times 3}$
Mat getPerspectiveTransform (
const Point2f src[], // 原图像的四角顶点坐标
const Point2f dst[], // 目标图像的四角顶点坐标
int solveMethod = DECOMP_LU // solve() 的解法
)
该函数的源代码实现如下:构造8组方程,转化为 $Ax=b$ 的问题,调用 solve() 函数来求解
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[], int solveMethod)
{
Mat M(3, 3, CV_64F), X(8, 1, CV_64F, M.ptr());
double a[8][8], b[8];
Mat A(8, 8, CV_64F, a), B(8, 1, CV_64F, b);
for( int i = 0; i < 4; ++i )
{
a[i][0] = a[i+4][3] = src[i].x;
a[i][1] = a[i+4][4] = src[i].y;
a[i][2] = a[i+4][5] = 1;
a[i][3] = a[i][4] = a[i][5] =
a[i+4][0] = a[i+4][1] = a[i+4][2] = 0;
a[i][6] = -src[i].x*dst[i].x;
a[i][7] = -src[i].y*dst[i].x;
a[i+4][6] = -src[i].x*dst[i].y;
a[i+4][7] = -src[i].y*dst[i].y;
b[i] = dst[i].x;
b[i+4] = dst[i].y;
}
solve(A, B, X, solveMethod);
M.ptr<double>()[8] = 1.;
return M;
}
b) 多组对应特征点:对于两个平面之间的投影变换,求得对应的多组特征点后,带入 findHomography() 函数,便可得到 srcPoints 投影到 dstPoints 的 $H_{3 \times 3}$
Mat findHomography (
InputArray srcPoints, // 原始平面特征点坐标,类型是 CV_32FC2 或 vector<Point2f>
InputArray dstPoints, // 目标平面特征点坐标,类型是 CV_32FC2 或 vector<Point2f>
int method = 0, // 0--最小二乘法; RANSAC--基于ransac的方法
double ransacReprojThreshold = 3, // 最大允许反投影误差
OutputArray mask = noArray(), //
const int maxIters = 2000, // 最多迭代次数
const double confidence = 0.995 // 置信水平
)
2.2 投影变换图像
已知单应性矩阵 $H_{3 \times 3}$,将任意图像代入 warpPerspective() 中,便可得到经过 2D投影变换 的目标图像
void warpPerspective (
InputArray src, // 输入图像
OutputArray dst, // 输出图象(大小 dsize,类型同 src)
InputArray M, // 3x3 单应性矩阵
Size dsize, // 输出图像的大小
int flags = INTER_LINEAR, // 插值方法
int borderMode = BORDER_CONSTANT, //
const Scalar& borderValue = Scalar() //
)
3 代码示例
3.1 透视校正
像平面 image1 和 image2 是相机在不同位置对同一物平面所成的像,这三个平面任选两个都互有 平面单应性
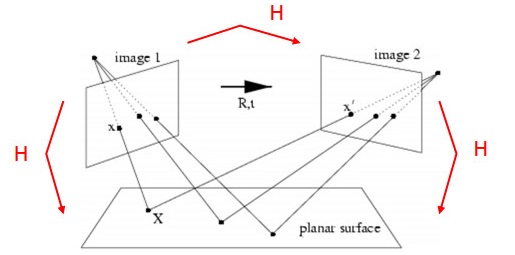
以相机标定为例,当人拿着棋盘格旋转不同角度时,可利用任意两个棋盘格间的单应性,将旋转不同角度的棋盘格,转换为统一角度
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/calib3d.hpp"
using namespace cv;
Size kPatternSize = Size(9, 6);
int main()
{
// 1) read image
Mat src = imread("chessboard1.jpg");
Mat dst = imread("chessboard2.jpg");
if (src.empty() || dst.empty())
return -1;
// 2) find chessboard corners
std::vector<Point2f> corners1, corners2;
bool found1 = findChessboardCorners(src, kPatternSize, corners1);
bool found2 = findChessboardCorners(dst, kPatternSize, corners2);
if (!found1 || !found2)
return -1;
// 3) estimate H matrix
Mat H = findHomography(corners1, corners2, RANSAC);
// 4)
Mat src_warp;
warpPerspective(src, src_warp, H, src.size());
// 5)
imshow("src", src);
imshow("dst", dst);
imshow("src_warp", src_warp);
waitKey();
}
结果如下:
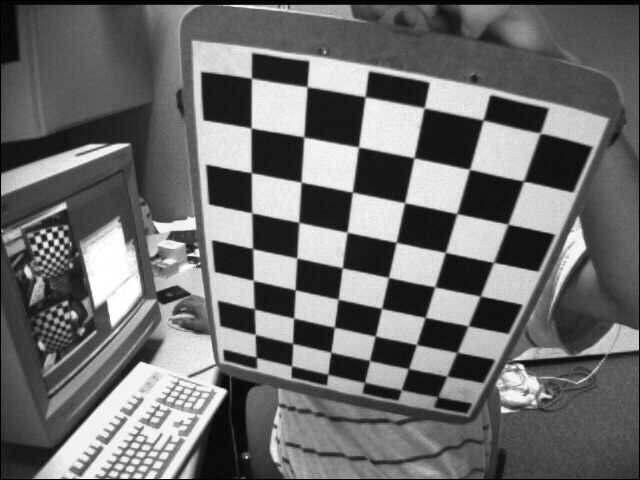


棋盘格倾斜 棋盘格正对 倾斜校正为正对
3.2 图像拼接
当相机围绕其投影轴,只做旋转运动时,所有的像素点可等效视为在一个无穷远的平面上,则单应性矩阵可由旋转变换 $R$ 和 相机标定矩阵 $K$ 来表示
$\quad \normalsize s \begin{bmatrix} x' \\ y' \\1 \end{bmatrix} = \normalsize K \cdot \normalsize R \cdot \normalsize K^{-1} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}$
因此,如果已知相机的标定矩阵,以及旋转变换前后的位姿,可利用平面单应性,将旋转变换前后的两幅图像拼接起来
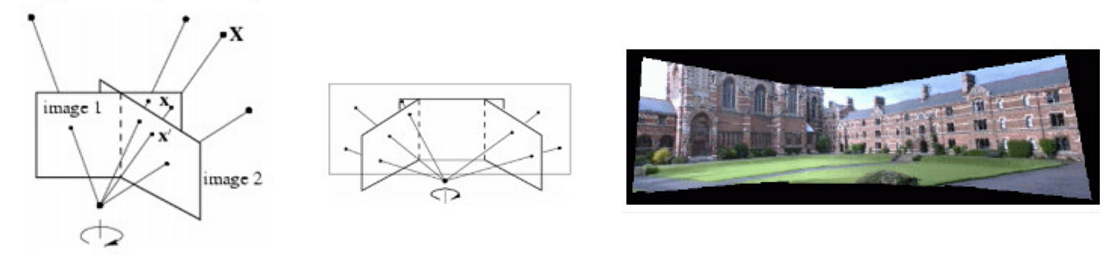
用 Blender 软件,获取相机只做旋转变换时的视图1和视图2,在已知相机标定矩阵和旋转矩阵的情况下,可计算出两个视图之间的单应性矩阵,从而完成拼接。
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/calib3d.hpp"
using namespace cv;
int main()
{
// 1) read image
Mat img1 = imread("view1.jpg");
Mat img2 = imread("view2.jpg");
if (img1.empty() || img2.empty())
return -1;
// 2) camera pose from Blender at location 1
Mat c1Mo = (Mat_<double>(4, 4) << 0.9659258723258972, 0.2588190734386444, 0.0, 1.5529145002365112,
0.08852133899927139, -0.3303661346435547, -0.9396926164627075, -0.10281121730804443,
-0.24321036040782928, 0.9076734185218811, -0.342020183801651, 6.130080699920654,
0, 0, 0, 1);
// camera pose from Blender at location 2
Mat c2Mo = (Mat_<double>(4, 4) << 0.9659258723258972, -0.2588190734386444, 0.0, -1.5529145002365112,
-0.08852133899927139, -0.3303661346435547, -0.9396926164627075, -0.10281121730804443,
0.24321036040782928, 0.9076734185218811, -0.342020183801651, 6.130080699920654,
0, 0, 0, 1);
// 3) camera intrinsic parameters
Mat cameraMatrix = (Mat_<double>(3, 3) << 700.0, 0.0, 320.0,
0.0, 700.0, 240.0,
0, 0, 1);
// 4) extract rotation
Mat R1 = c1Mo(Range(0, 3), Range(0, 3));
Mat R2 = c2Mo(Range(0, 3), Range(0, 3));
// 5) compute rotation displacement: c1Mo * oMc2
Mat R_2to1 = R1 * R2.t();
// 6) homography
Mat H = cameraMatrix * R_2to1 * cameraMatrix.inv();
H /= H.at<double>(2, 2);
// 7) warp
Mat img_stitch;
warpPerspective(img2, img_stitch, H, Size(img2.cols * 2, img2.rows));
// 8) stitch
Mat half = img_stitch(Rect(0, 0, img1.cols, img1.rows));
img1.copyTo(half);
imshow("Panorama stitching", img_stitch);
waitKey();
}
输出结果如下:

视图1 视图2 拼接后的视图
参考资料:
OpenCV Tutorials / feature2d module / Basic concepts of the homography explained with code
Lecture 16: Planar Homographies, Robert Collins
Affine and Projective Transformations
原文链接: http://www.cnblogs.com/xinxue/
专注于机器视觉、OpenCV、C++ 编程

 浙公网安备 33010602011771号
浙公网安备 33010602011771号