

Go 互斥锁 Mutex 源码分析(二)
原创文章,欢迎转载,转载请注明出处,谢谢。
0. 前言
在 Go 互斥锁 Mutex 源码分析(一) 一文中分析了互斥锁的结构和基本的抢占互斥锁的场景。在学习锁的过程中,看的不少文章是基于锁的状态解释的,个人经验来看,从锁的状态出发容易陷入细节,了解锁的状态转换过一段时间就忘,难以做到真正的理解。想来是用静态的方法分析动态的问题导致的。在实践中发现结合场景分析互斥锁对笔者来说更加清晰,因此有了 Go 互斥锁 Mutex 源码分析(一),本文接着结合不同场景分析互斥锁。
1. 不同场景下的锁状态
1.1 唤醒 goroutine
给出示意图:
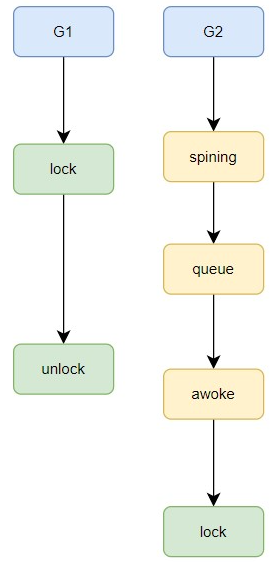
G1 通过 Fast path 拿到锁,G2 在自旋之后,锁还是已锁状态。这是和 Go 互斥锁 Mutex 源码分析(一) 中的场景不一样的地方。接着自旋之后看,这种场景下会发生什么:
func (m *Mutex) lockSlow() {
...
for {
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
...
}
// step2: 当前锁未释放,old = 1
new := old
// step2: 如果当前锁是饥饿的,跳过期望状态 new 的更新
// - 这里锁不是饥饿锁,new = old = 1
if old&mutexStarving == 0 {
new |= mutexLocked
}
// step2: 当前锁未释放,更新 new
// - 更新 new 的等待 goroutine 位,表示有一个 goroutine 等待
// - 更新 new 为 1001,new = 9
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// step2: 当前 goroutine 不是饥饿状态,跳过 new 更新
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
// step2: 当前 goroutine 不是唤醒状态,跳过 new 更新
if awoke {
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
new &^= mutexWoken
}
// step3: 原子 CAS 更新锁的状态
// - 这里更新锁 m.state = 1 为 m.state = new = 9
// - 表示当前有一个 goroutine 在等待锁
if atomic.CompareAndSwapInt32(&m.state, old, new) {
...
// waitStartTime = 0, queueLifo = false
queueLifo := waitStartTime != 0
if waitStartTime == 0 {
// 更新 waitStartTime
waitStartTime = runtime_nanotime()
}
// step4: 调用 runtime_SemacquireMutex 阻塞 goroutine
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
...
}
}
}
Mutex.lockSlow 中更新了锁状态,接着进入 runtime_SemacquireMutex。runtime_SemacquireMutex 是个非常重要的函数,我们有必要介绍它。
runtime_SemacquireMutex 接收三个参数。其中,重点是信号量 &m.sema 和 queueLifo。如果 queueLifo = false,当前 goroutine 将被添加到等待锁队列的队尾,阻塞等待唤醒。
G2 执行到 runtime_SemacquireMutex 时将进入阻塞等待唤醒状态,那么怎么唤醒 G2 呢? 我们需要看解锁过程。
1.1.1 sync.Mutex.Unlock
在 G2 阻塞等待唤醒时,G1 开始释放锁。进入 sync.Mutex.Unlock:
func (m *Mutex) Unlock() {
...
// 将 m.state 的锁标志位置为 0,表示锁已释放
new := atomic.AddInt32(&m.state, -mutexLocked)
// 检查 new 是否为 0,如果为 0 则表示当前无 goroutine 等待,直接退出
// 这里 new = 9,G2 在等待唤醒
if new != 0 {
m.unlockSlow(new)
}
}
进入 Mutex.unlockSlow:
func (m *Mutex) unlockSlow(new int32) {
// 检查锁是否已释放,释放一个已经释放的锁将报错
if (new+mutexLocked)&mutexLocked == 0 {
fatal("sync: unlock of unlocked mutex")
}
// 检查锁是普通锁还是饥饿锁
if new&mutexStarving == 0 {
// 这里 new = 8 是普通锁,进入处理普通锁逻辑
old := new
for {
// 如果没有 goroutine 等待,则返回
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// old 的唤醒位置 1,并且将等待的 goroutine 减 1,表示将唤醒一个等待中的 goroutine
// 这里 new = 2
new = (old - 1<<mutexWaiterShift) | mutexWoken
// m.state = 8, old = 8, new = 2
// CAS 更新 m.state = new = 2
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 进入 runtime_Semrelease 唤醒 goroutine
runtime_Semrelease(&m.sema, false, 1)
return
}
old = m.state
}
} else {
// 处理饥饿锁逻辑,暂略
runtime_Semrelease(&m.sema, true, 1)
}
}
sync.Mutex.Unlock 中的 runtime_Semrelease 唤醒队列中等待的 goroutine。其中,主要接收信号量 &m.sema 和 handoff 两个参数。这里 handoff = false,将增加信号量,唤醒队列中等待的 goroutine G2。
1.1.2 唤醒 G2
唤醒之后,G2 继续执行后续代码:
func (m *Mutex) lockSlow() {
...
for {
...
if atomic.CompareAndSwapInt32(&m.state, old, new) {
...
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
// 检查唤醒的 goroutine 是否是饥饿模式
// 如果是饥饿模式,或等待锁时间超过 1ms 则将 goroutine 置为饥饿模式
// 注意这是 goroutine 是饥饿的,不是锁是饥饿锁
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
// m.state 在 G1 unlock 时被更新为 2
old = m.state
// 锁不是饥饿锁,跳过
if old&mutexStarving != 0 {
...
}
awoke = true
iter = 0
}
}
}
唤醒后的 G2 将 old 更新为 2。信号量增加,释放锁,只会唤醒一个 goroutine,被唤醒的 goroutine,这里是 G2,将继续循环:
func (m *Mutex) lockSlow() {
...
for {
// old = 2,不会进入自旋
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
...
}
// 更新 new:new 是期望 goroutine 更新的状态
// 这里 new = old = 2
new := old
// old = 2,不是饥饿锁
// 更新 new 为 011,3
if old&mutexStarving == 0 {
new |= mutexLocked
}
// old = 2,表示锁已释放,不会将 goroutine 加入等待位
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// 不饥饿,跳过
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
// awoke = true
if awoke {
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
// 重置唤醒位,将 new 更新为 001,1
new &^= mutexWoken
}
// m.state = 2, old = 2, new =1
// CAS 更新 m.state= new = 1,表示当前 goroutine 已加锁
if atomic.CompareAndSwapInt32(&m.state, old, new) {
// 当前 goroutine 已加锁跳出循环
if old&(mutexLocked|mutexStarving) == 0 {
break // locked the mutex with CAS
}
...
}
}
}
在循环一轮后,G2 将拿到锁,接着执行临界区代码,最后在释放锁。
这里的场景是唤醒之后,goroutine 不饥饿。那么饥饿锁又是如何触发的呢?我们继续看饥饿锁的场景。
1.2 饥饿锁
饥饿锁场景下的示意图如下:
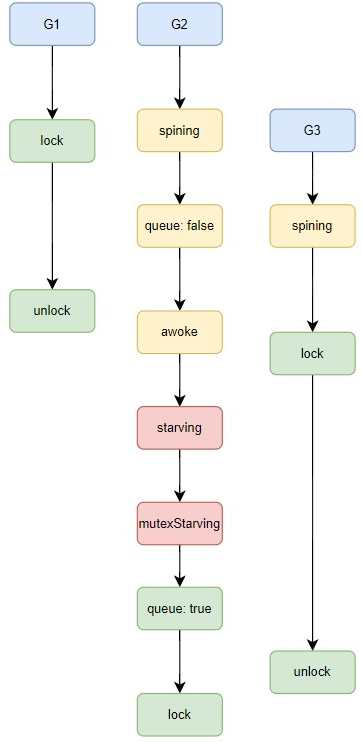
当 G1 释放锁时,G3 正在自旋等待锁释放。当 G1 释放锁时,被唤醒的 G2 和自旋的 G3 竞争大概率会拿不到锁。Go 在 1.9 中引入互斥锁的 饥饿模式 来确保互斥锁的公平性。
对于互斥锁循环中的大部分流程,我们在前两个场景下也过了一遍,这里有重点的摘写,以防赘述。
首先,还是看 G2,当 G1 释放锁时,G2 被唤醒,执行后续代码。如下:
func (m *Mutex) lockSlow() {
...
for {
...
if atomic.CompareAndSwapInt32(&m.state, old, new) {
...
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
// 唤醒 G2,G2 等待锁时间超过 1ms
// starving = true
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
// 锁被 G3 抢占,m.state = 0011
old = m.state
// 这时候 old 还不是饥饿锁,跳过
if old&mutexStarving != 0 {
...
}
awoke = true
iter = 0
}
}
}
唤醒 G2 之后,G2 等待锁时间超过 1ms 进入饥饿模式。接着进入下一轮循环:
func (m *Mutex) lockSlow() {
...
for {
// old 是唤醒锁,不会进入自旋
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
...
}
// 锁的期望状态,new = old = 0011
new := old
// 锁不是饥饿锁,更新 new 的锁标志位为已锁
// new = 0011
if old&mutexStarving == 0 {
new |= mutexLocked
}
// 锁如果是饥饿或者已锁状态更新 goroutine 等待位
// new = 1011
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// goroutine 饥饿,且锁已锁
// 更新 new 为饥饿状态,new = 1111
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
// 这里 G2 是唤醒的,重置唤醒位
// new = 1101
if awoke {
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
new &^= mutexWoken
}
// CAS 更新 m.state = new = 1101
if atomic.CompareAndSwapInt32(&m.state, old, new) {
...
// G2 入队列过,这里 queueLifo = true
queueLifo := waitStartTime != 0
// 将 G2 重新加入队列,并加入到队首,阻塞等待
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
...
}
}
}
G2 进入饥饿模式,将互斥锁置为饥饿模式,当前互斥锁状态为 m.state = 1101。G2 作为队列中的队头,阻塞等待锁释放。
类似的,我们看 G3 释放锁的过程。
1.2.1 释放饥饿锁
G3 开始释放锁:
func (m *Mutex) Unlock() {
...
// new = 1100
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// 进入 Mutex.unlockSlow
m.unlockSlow(new)
}
}
func (m *Mutex) unlockSlow(new int32) {
...
// new = 1100,是饥饿锁
if new&mutexStarving == 0 {
...
} else {
// 进入处理饥饿锁逻辑
// handoff = true,直接将队头阻塞的 goroutine 唤醒
runtime_Semrelease(&m.sema, true, 1)
}
}
1.2.2 饥饿锁唤醒
在一次的在队头中阻塞的 G2 被唤醒,接着执行唤醒后的代码:
func (m *Mutex) lockSlow() {
...
for {
...
if atomic.CompareAndSwapInt32(&m.state, old, new) {
...
runtime_SemacquireMutex(&m.sema, queueLifo, 1)
starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs
old = m.state
// old = 1100,是饥饿锁
if old&mutexStarving != 0 {
...
// delta = -(1001)
delta := int32(mutexLocked - 1<<mutexWaiterShift)
if !starving || old>>mutexWaiterShift == 1 {
...
// delta = -(1101)
delta -= mutexStarving
}
//更新互斥锁状态 m.state = 0001,退出循环
atomic.AddInt32(&m.state, delta)
break
}
}
}
}
唤醒之后的 G2 直接获得锁,将互斥锁状态置为已锁,直到释放。
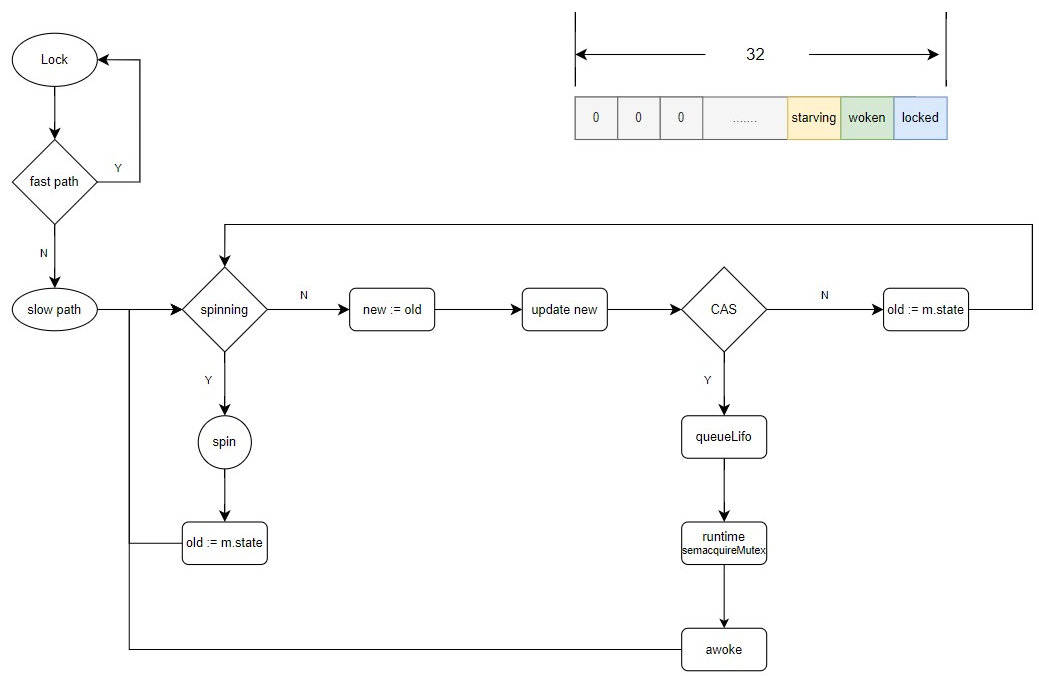
2. 锁状态流程
前面我们根据几个场景给出了互斥锁的状态转换过程,这里直接给出互斥锁的流程图如下:
3. 总结
本文是 Go 互斥锁 Mutex 源码分析的第二篇,进一步通过两个场景分析互斥锁的状态转换。互斥锁的状态转换如果陷入状态更新,很容易头晕,这里通过不同场景,逐步分析,整个状态,接着给出状态转换流程图,力图做到源码层面了解锁的状态转换。

